Lecture 10 非线性轨迹优化(DDP/iLQR法) - 知乎
Lecture 11 DDP/iLQR扩展 - 知乎
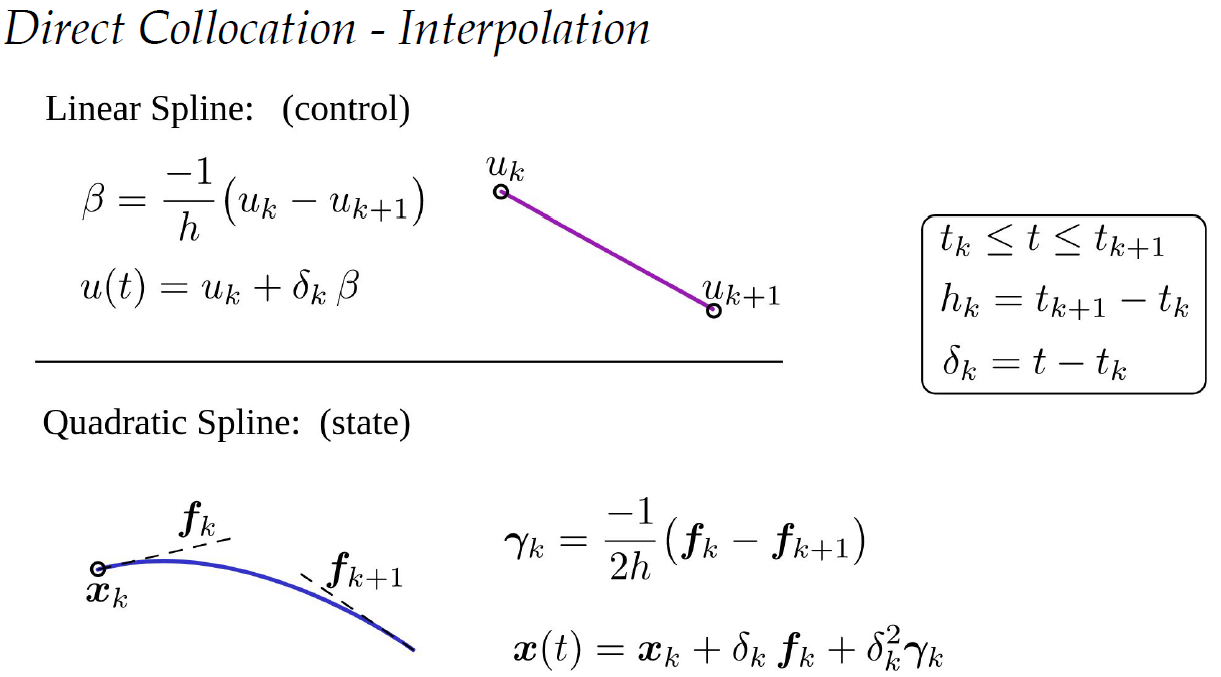
Lecture 12 直接配点法(Direct Collocation) - 知乎
HW3 基于iLQR/DDP四旋翼控制 - 知乎
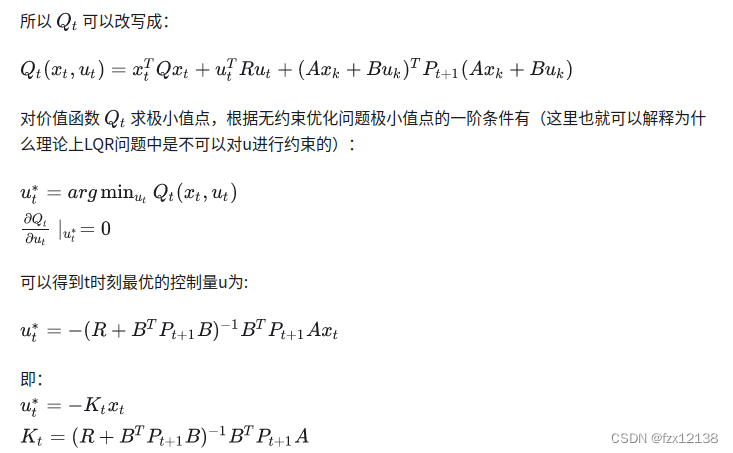
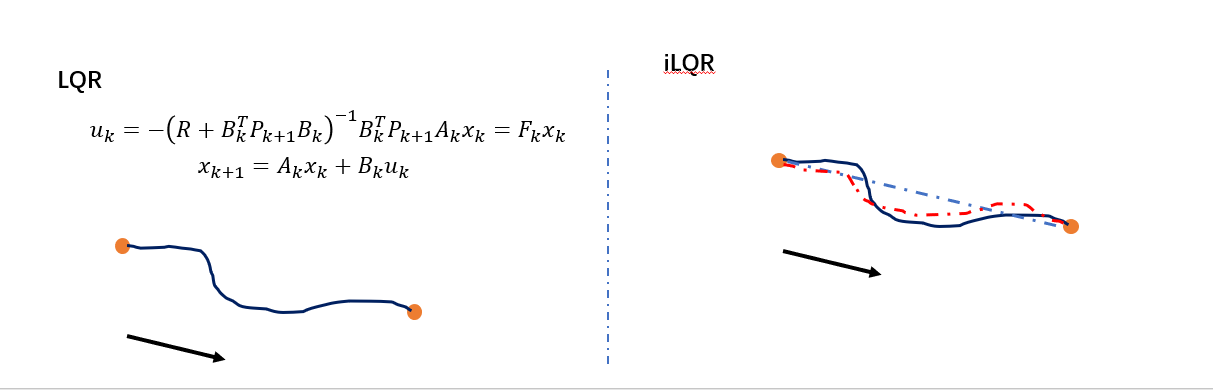
LQR与iLQR算法与运动规划 - 知乎
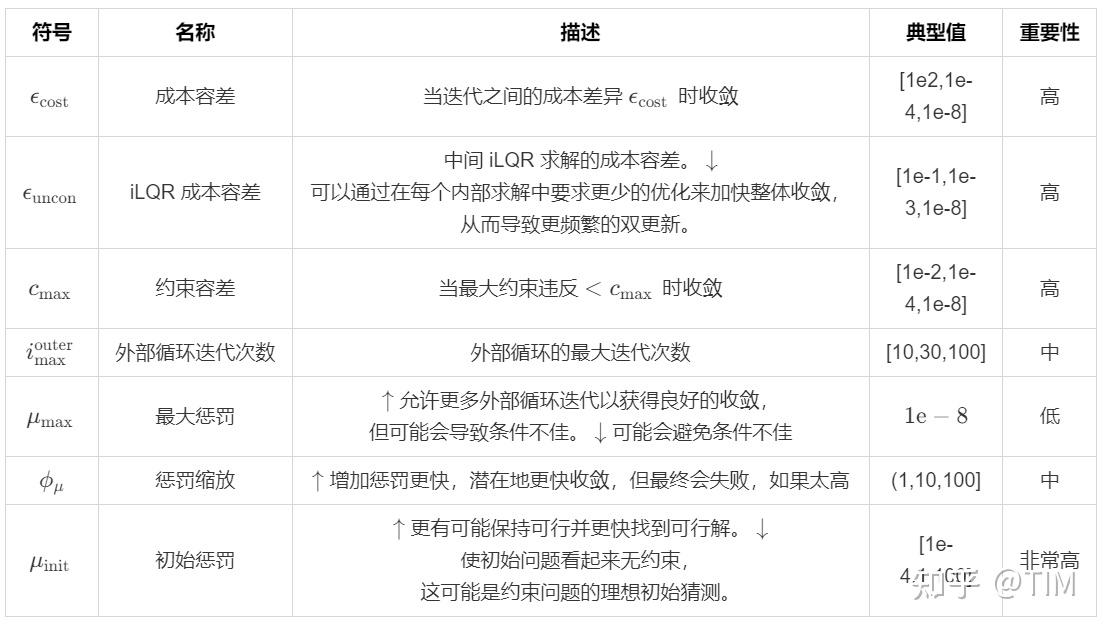
增广拉格朗日 iLQR 轨迹优化 - 知乎
CS285课程笔记(3.2(1)) Model-Based方法---Planning方法 - 知乎
公开课精华 | 机器人的带约束轨迹规划 - 知乎
ILQR算法约束处理与内点法DDP - 知乎
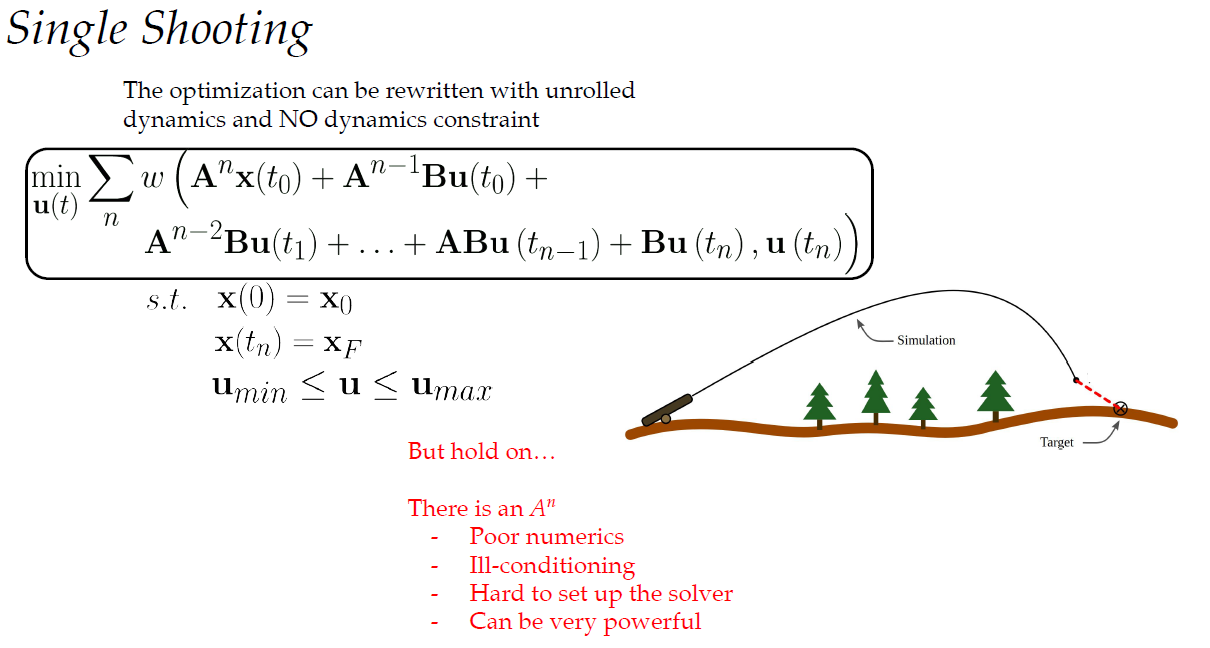
轨迹优化01. 简要介绍 - 知乎
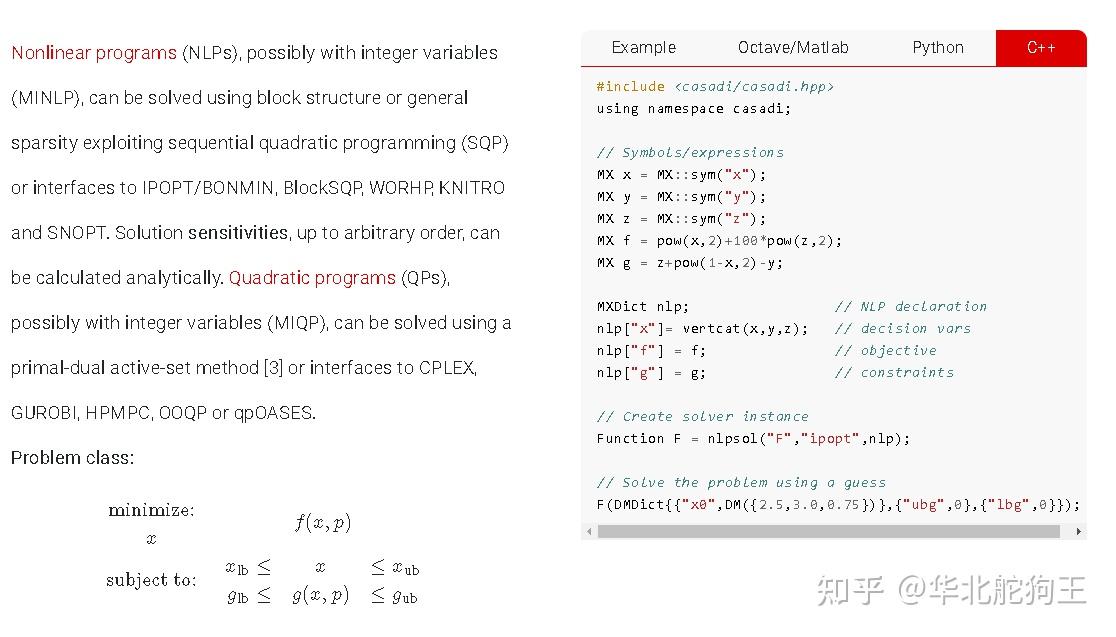
NLP非线性优化第一步Webots与CasAdi - 知乎
第十二课 轨迹优化技巧 - 知乎
五、轨迹优化(硬约束与软约束) - 知乎
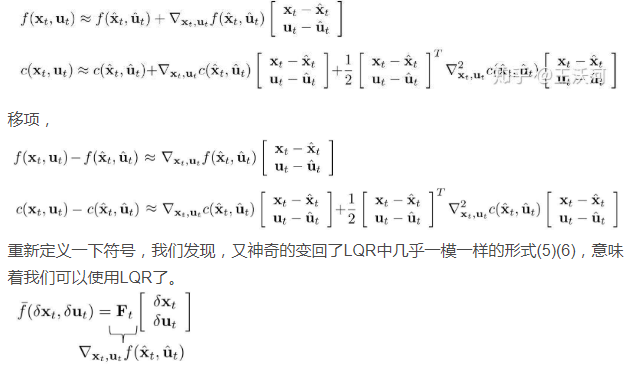
主编推荐 | 基于模型的强化学习—LQR与iLQR - 知乎
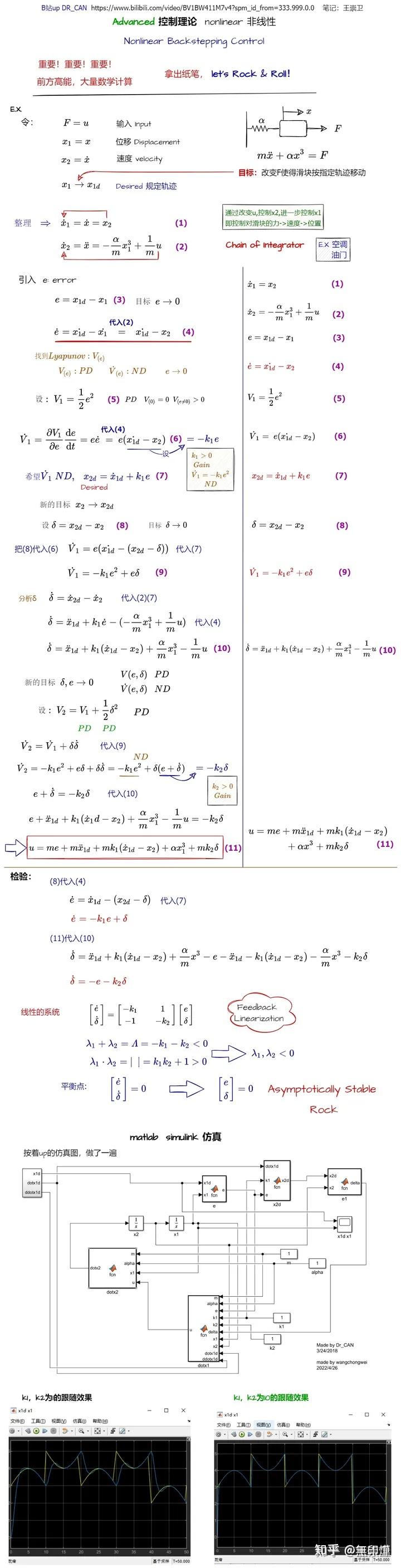
非线性系统反步控制法 - 知乎
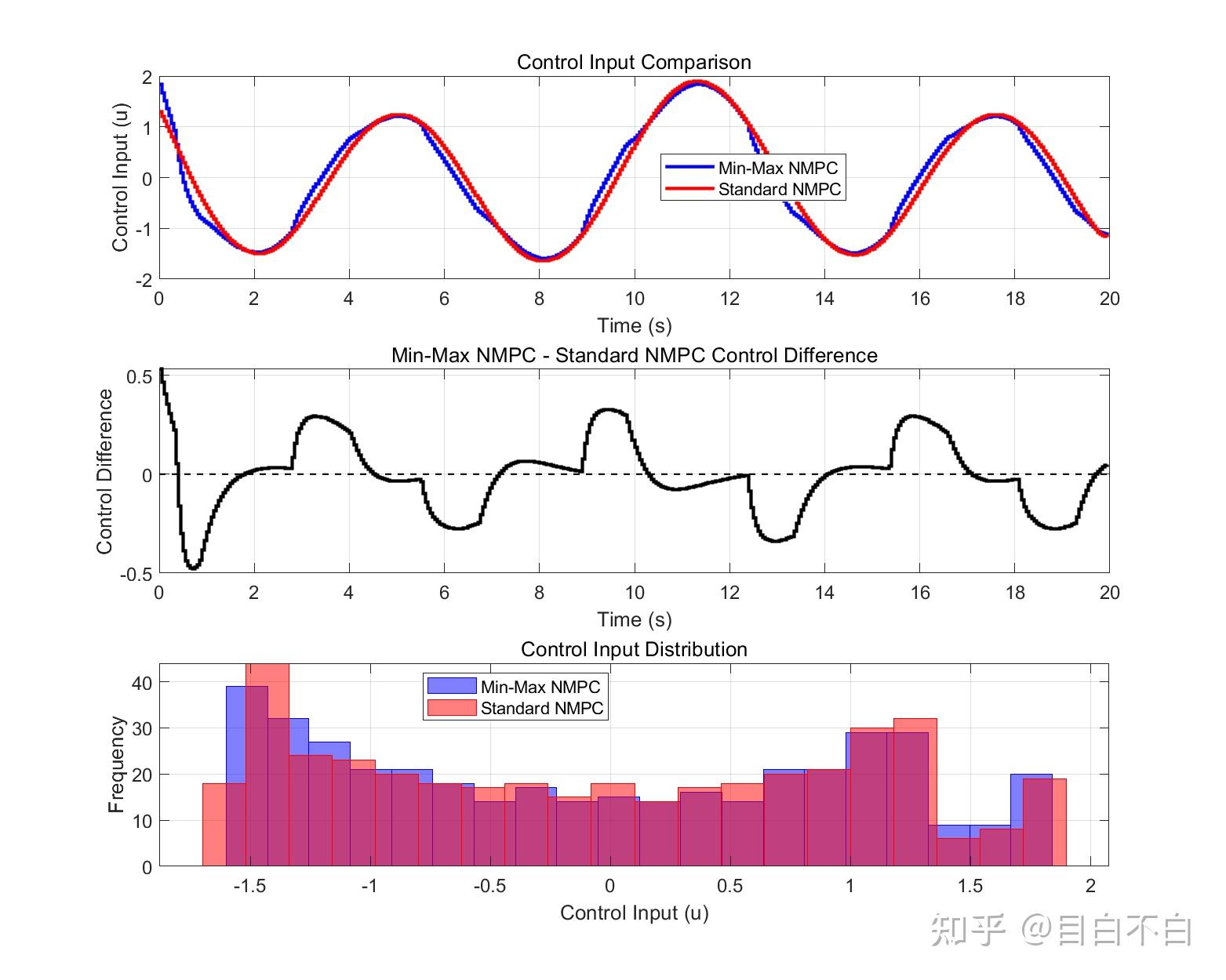
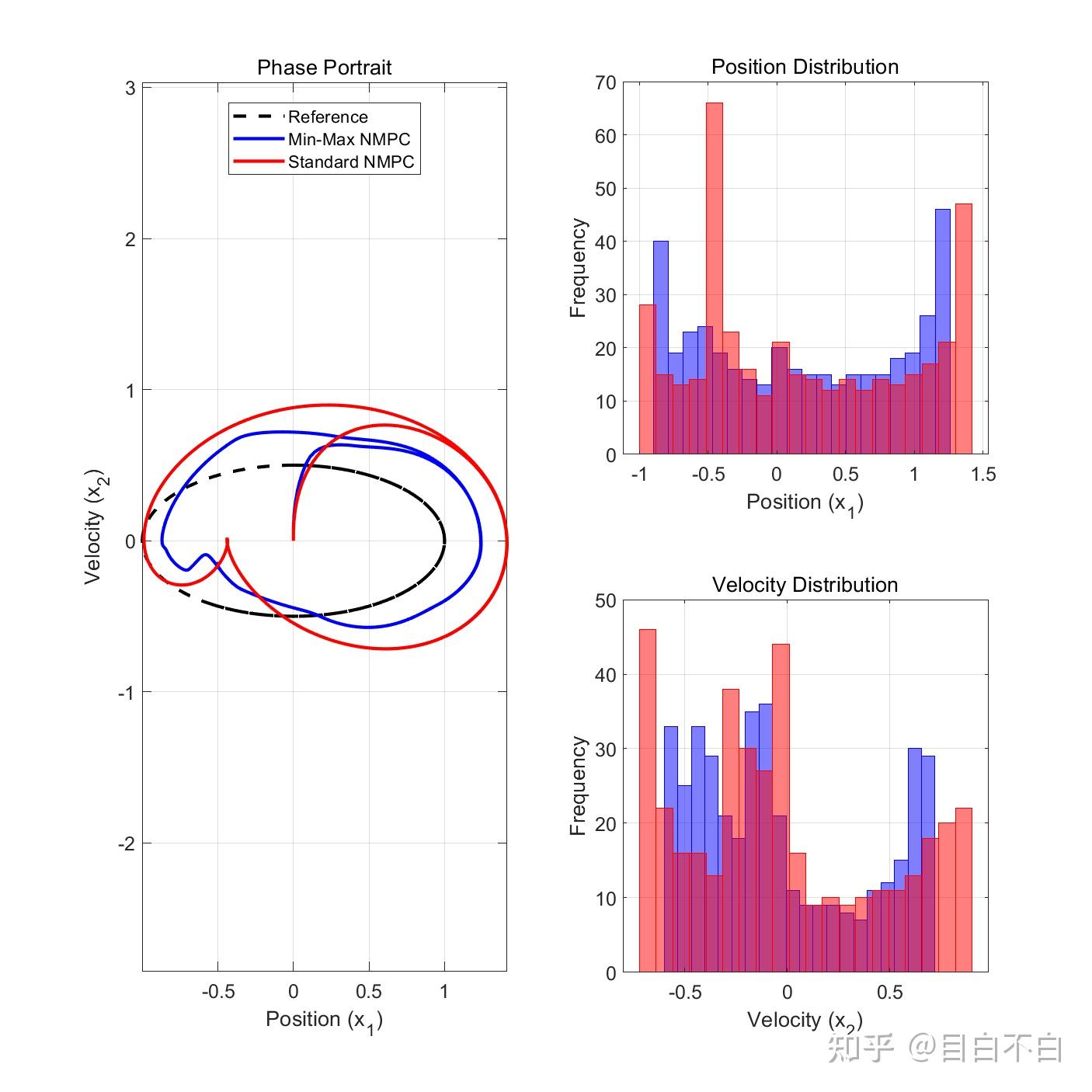
基于场景近似方法的最小-最大非线性模型预测控制的轨迹跟踪算法(Min-Max MPC)(开源,分析) - 知乎
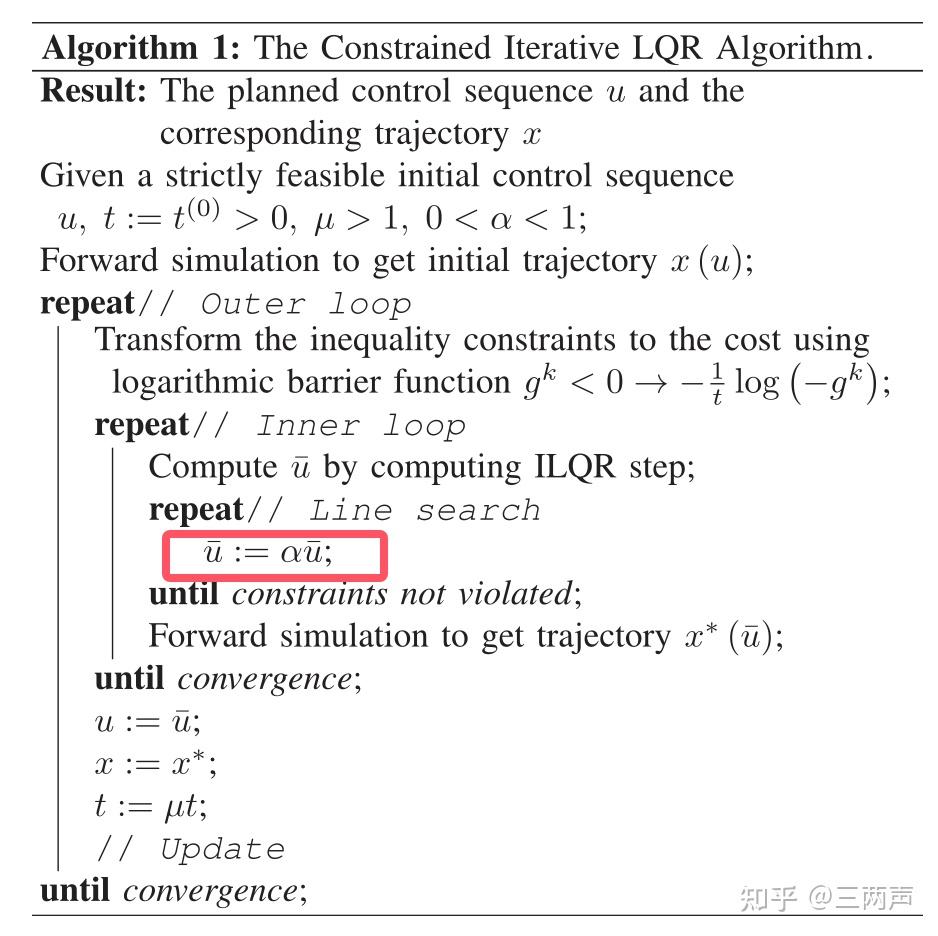
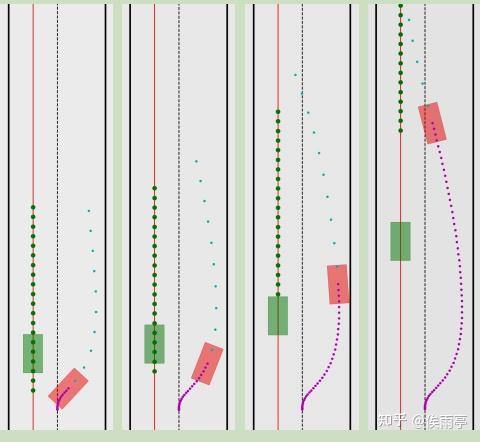
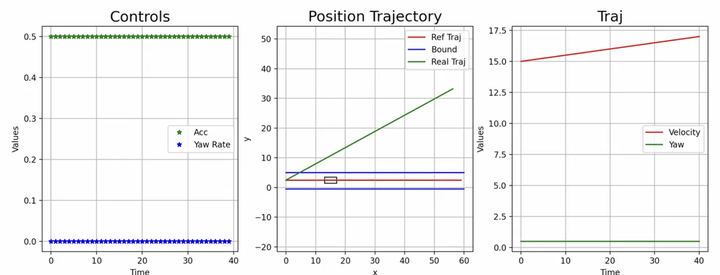
【论文解读】Constrained iLQR for Motion Planning in Autonomous Vehicles - 知乎
iLQR算法(一)推导 - 知乎
最优控制中的动态规划 - 倒推法, LQR, iLQR - 知乎
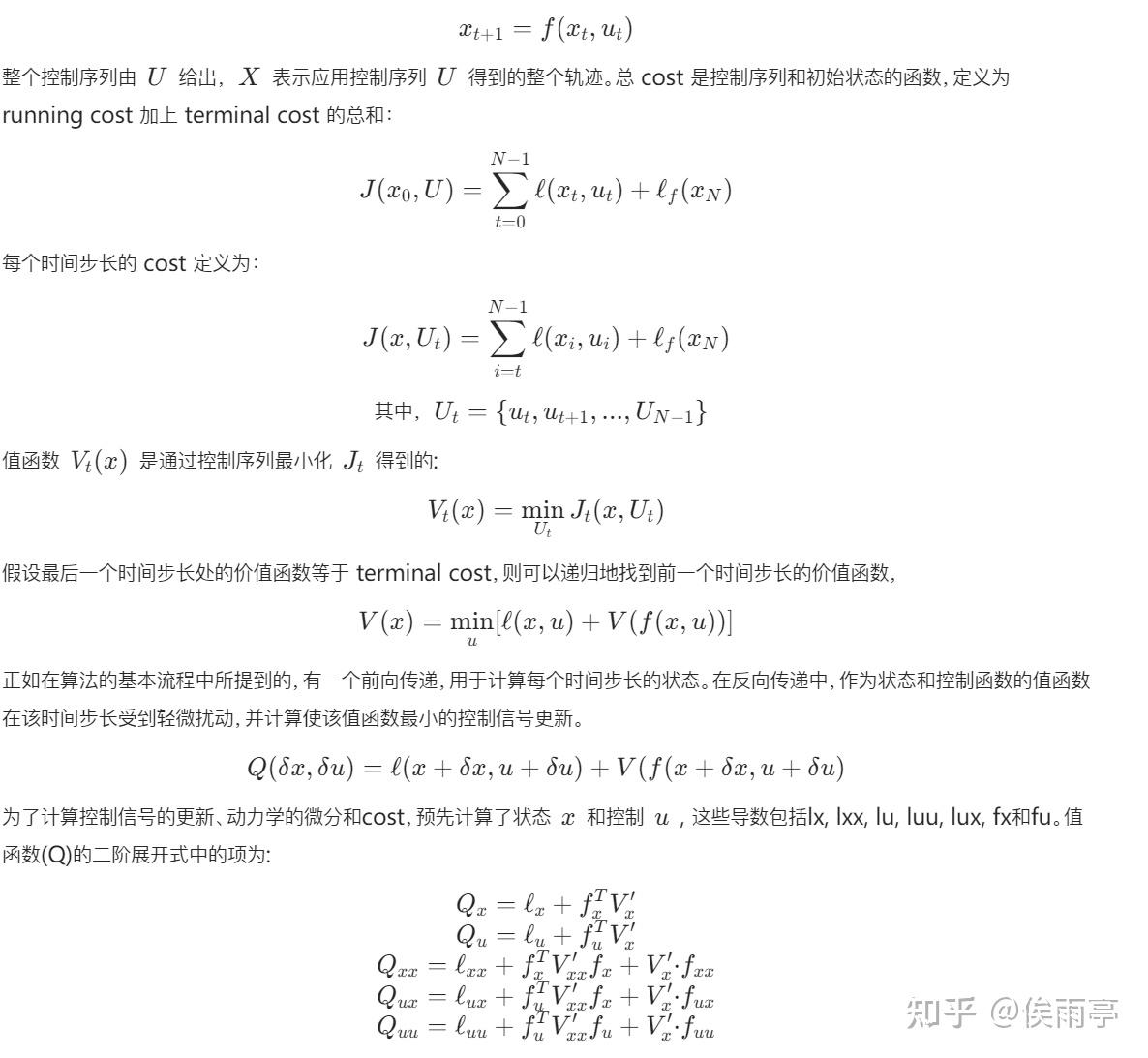
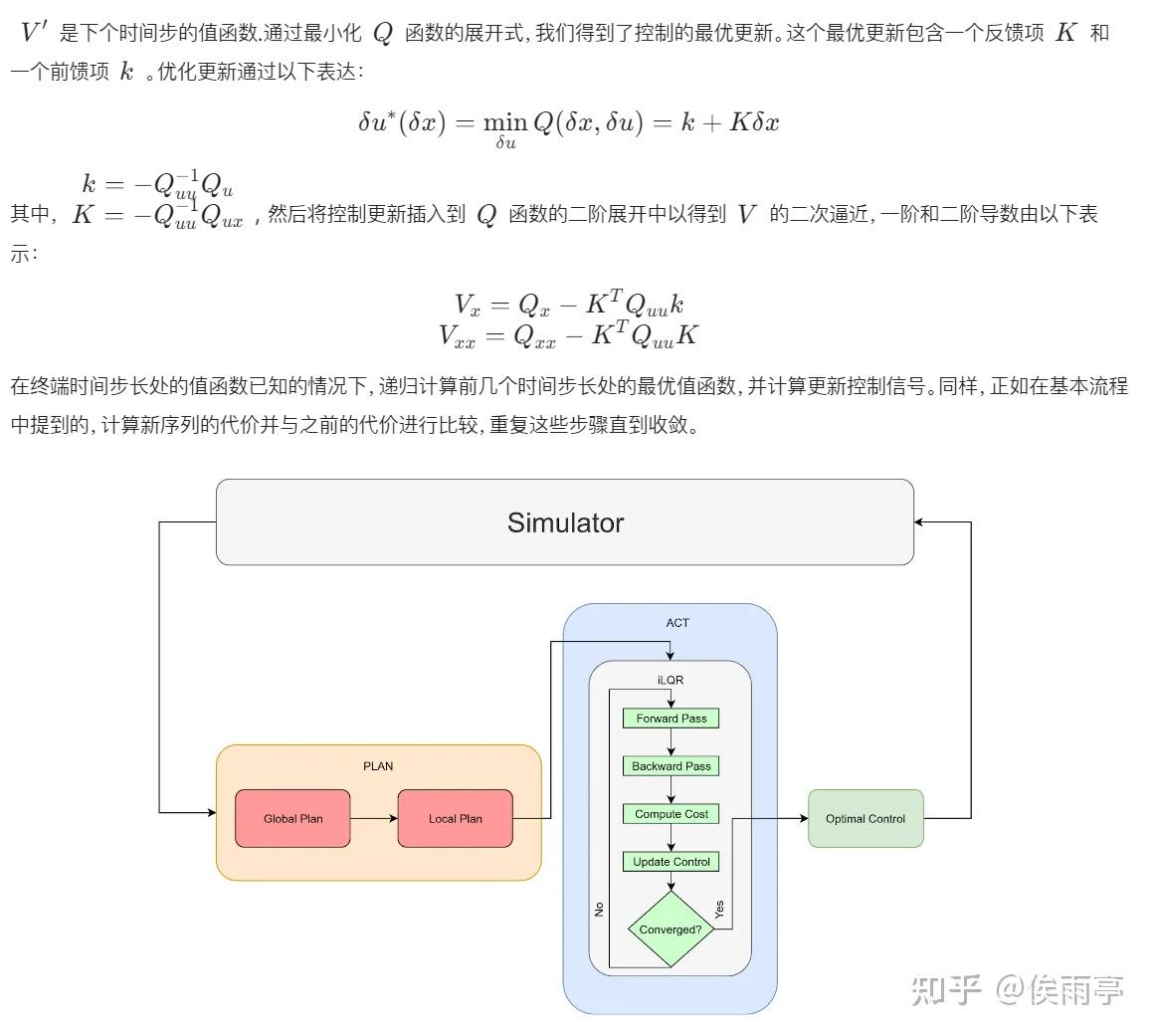
非线性模型预测控制 微分动态规划(NMPC-DDP)详解(一) - 知乎
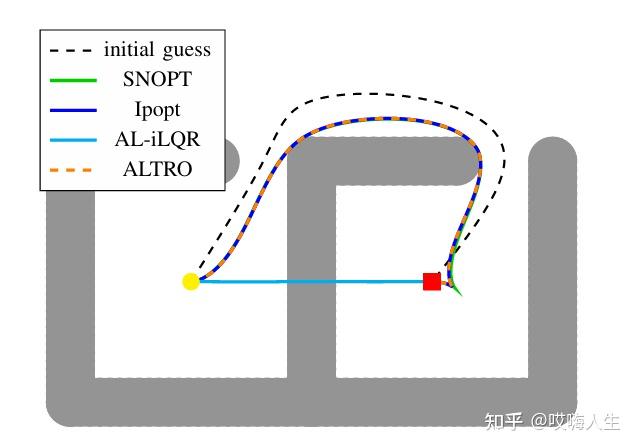
轨迹优化免费求解器总结--附带开源项目推荐 - 知乎
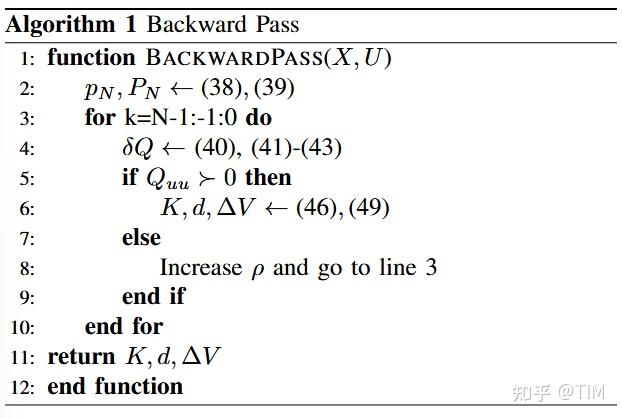
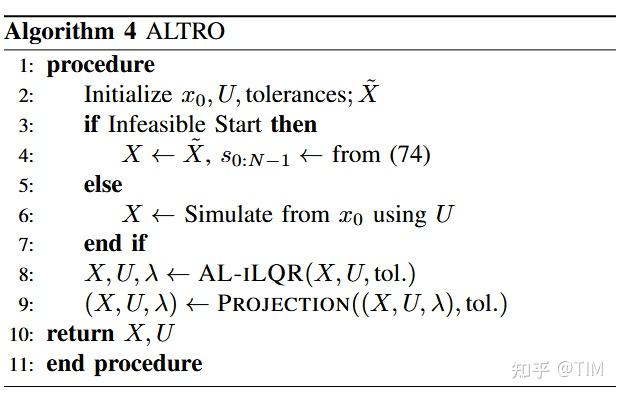
ALTRO(AL-ILQR)参考资料、原理、实现以及验证 - 知乎
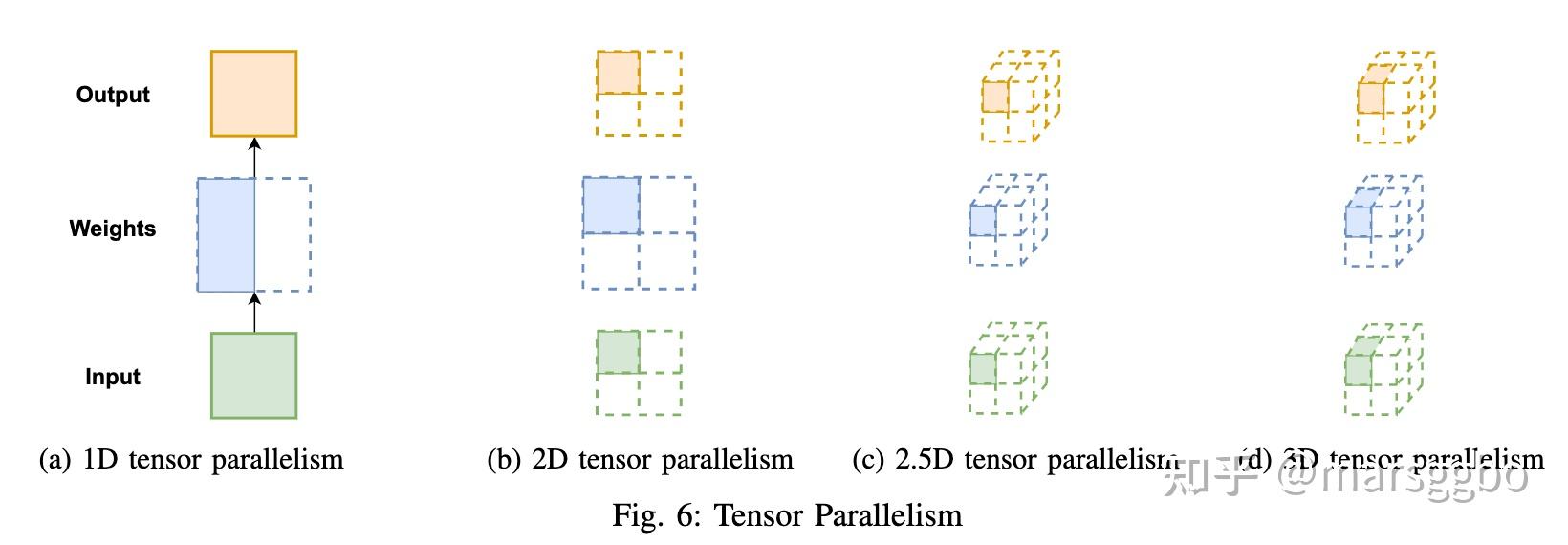
深度学习并行训练算法一锅炖: DDP, TP, PP, ZeRO - 知乎
哪些控制类的算法惊艳了你? - 知乎
轨迹优化13. 强化学习与深度学习 - 知乎
有模型的强化学习—LQR与iLQR - 知乎
从iLQR算法到CILQR算法 - 知乎
基于增广拉格朗日的轨迹规划(AL-iLQR)算法实现 - 知乎
一种AL-iLQR的框架实现和应用 - 知乎
一种高阶运动学模型基于ilqr 的轨迹生成 - 知乎
CS285 LQR and iLQR - 知乎
ILQR&DDP的整理 - 知乎
机器人路径规划、轨迹优化算法 - 知乎
轨迹优化 | 微分动态规划DDP与迭代线性二次型调节器iLQR理论推导 - 教程_mb61c46a7ab1eee的技术博客_51CTO博客
2.轨迹优化 - 高ws - 博客园
NLP非线性优化 - 古月居
lecture10 非线性轨迹优化(DDP/iLQR法)_cilqr-CSDN博客
【iLQR】—— 基于最优控制ilqr/ddp的运动规划-CSDN博客
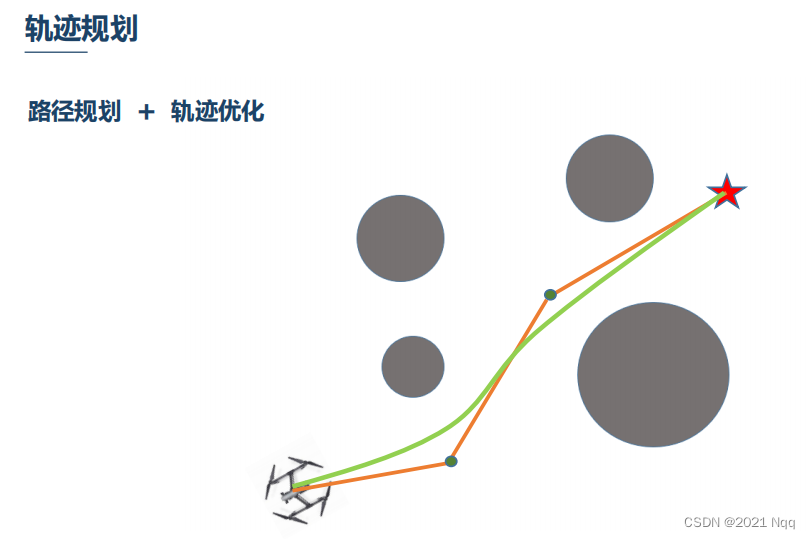
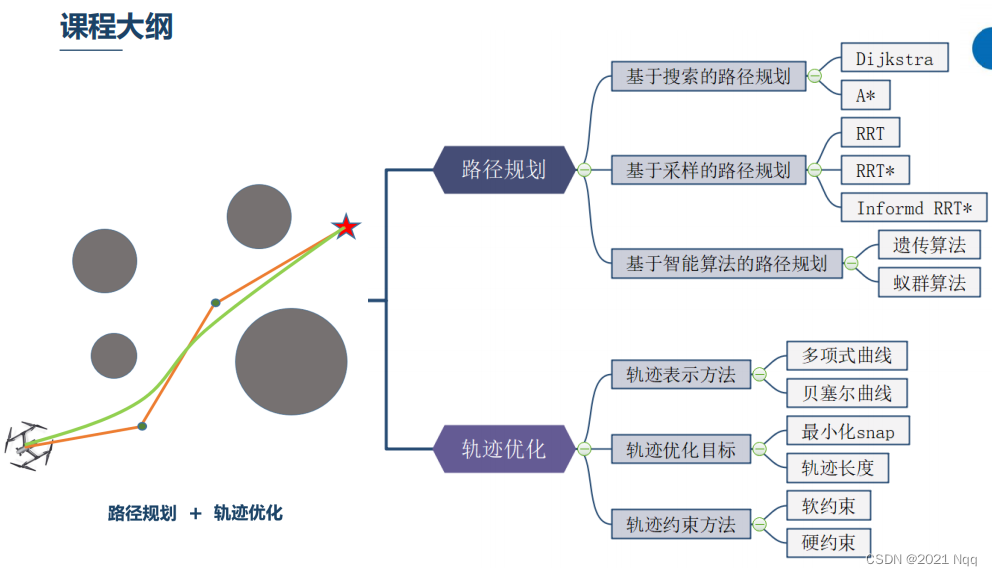
0 路径规划 + 轨迹优化(B站)_非线性滤波器轨迹规划-CSDN博客
轨迹优化 | 微分动态规划DDP与迭代线性二次型调节器iLQR理论推导_ddp微分动态规划-CSDN博客
LQR,iLQR,DDP控制论经典算法(MBRL基础知识)-CSDN博客
轨迹优化 | 微分动态规划DDP与迭代线性二次型调节器iLQR理论推导
每日学习更新(LQR+iLQR)_ilqr 路径规划-CSDN博客
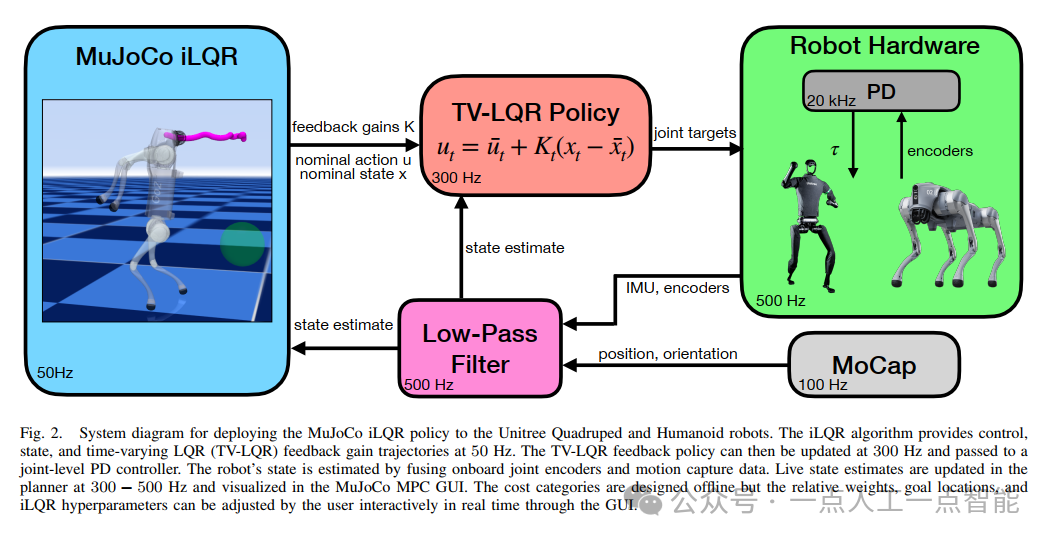
仿真世界的作弊代码:MuJoCo软接触模型+ iLQR=现实机器人完美步态-腾讯云开发者社区-腾讯云
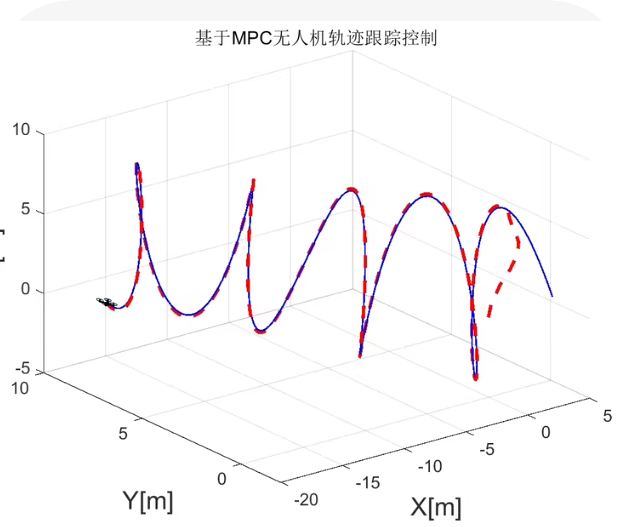
基于非线性MPC的无人机轨迹跟踪控制系统_非线性系统 跟踪控制-CSDN博客
离散LQR与iLQR的推导思路-CSDN博客
轨迹规划-Constrained ILQR-腾讯云开发者社区-腾讯云
具有典型非线性特性的二阶系统的相轨迹(1)_二阶系统相轨迹-CSDN博客
轨迹优化与直接配点法 | 萤火
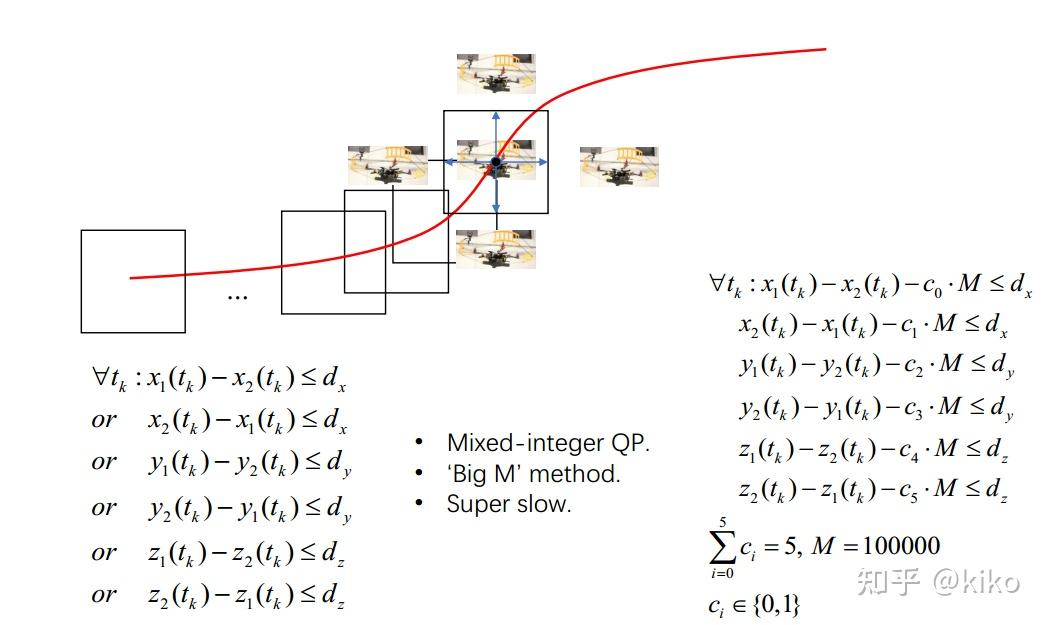
【无人机】多障碍避障轨迹设计的混合整数线性规划附Matlab代码_ilqr避障轨迹生成-CSDN博客
【轨迹跟踪】基于GRNN-RBFNN-ILC算法神经网络的迭代学习控制用于未知SISO非线性系统的轨迹跟踪附Matlab代码_基于rbf神经 ...
基于最优控制ilqr/ddp的运动规划_哔哩哔哩_bilibili
【paper解读-轨迹规划】Safe Planning for Self-Driving Via Adaptive Constrained ...
一种基于积分法和反步法改进的非线性轨迹跟踪控制方法
最优化理论与自动驾驶(十一):基于iLQR的自动驾驶轨迹跟踪算法(c++和python版本)-CSDN博客
大脑功能连接的发展遵循青春期依赖的非线性轨迹_cingulo-opercular网络-CSDN博客
【Koopman 算子】深度学习用于非线性动力学的通用线性嵌入研究(Python、Matlab代码实现)_用于非线性动力学的机器学习算法模型 ...
轨迹优化问题-CSDN博客
5轨迹生成_control of quadrotors using the hopf fibration on -CSDN博客
非线性规划求解方法:序列线性规划(Sequential linear programming)
AL-iLQR实践指南 3.将 LQR 推广到非线性系统,实现带正则化和线搜索的稳定 iLQR | 时空联合规划 | GL Robotics ...
lecture11 DDP/iLQR扩展_增广拉格朗日法ddp-CSDN博客
非线性最优化算法与实践_哔哩哔哩_bilibili
一种基于非线性规划的曲线道路自动车换道轨迹规划方法与流程