【开源代码】首个专为自动驾驶中 LiDAR 和 IMU外参标定 - 知乎
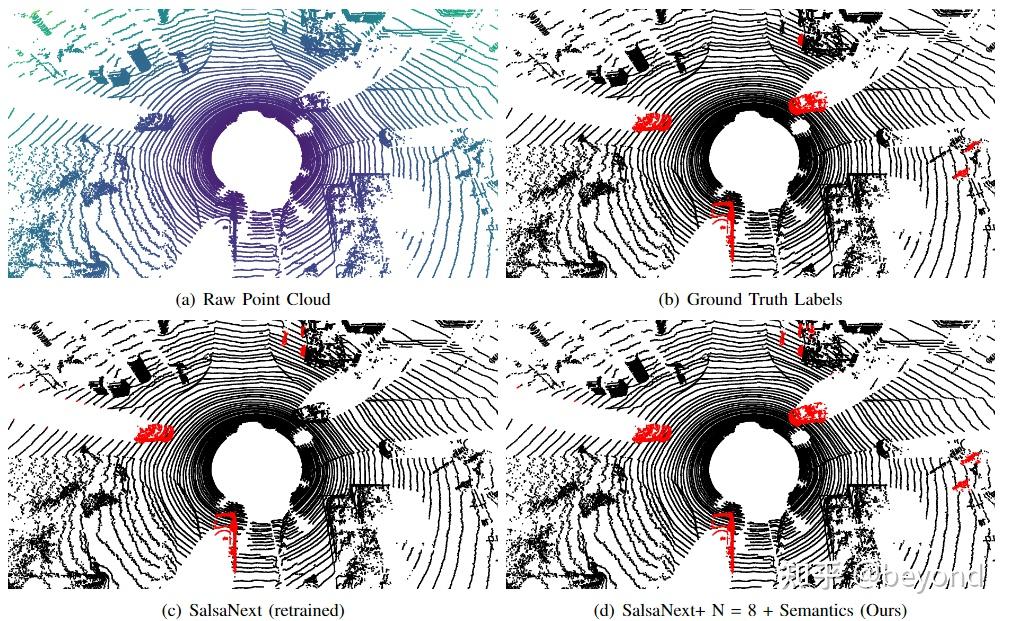
Moving Object Segmentation in 3D LiDAR Data(Lidar-mos)论文解读 - 知乎
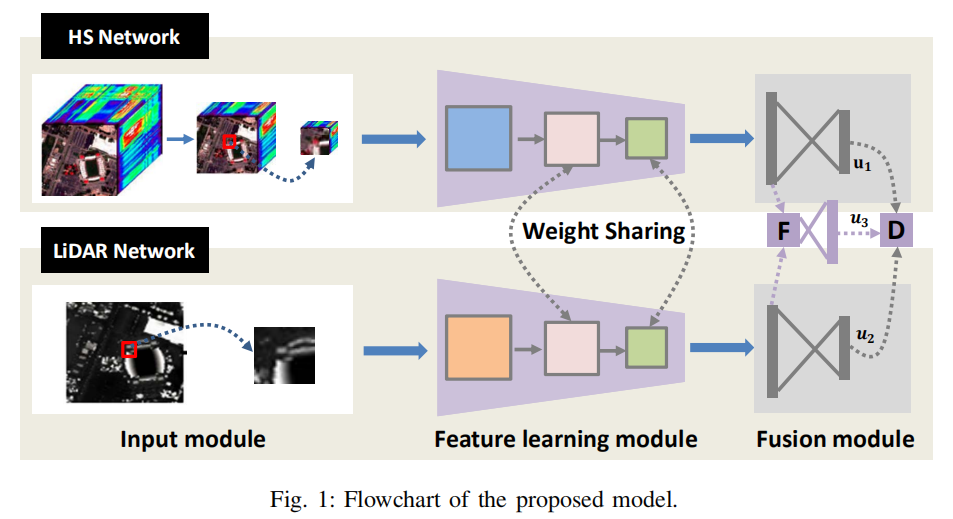
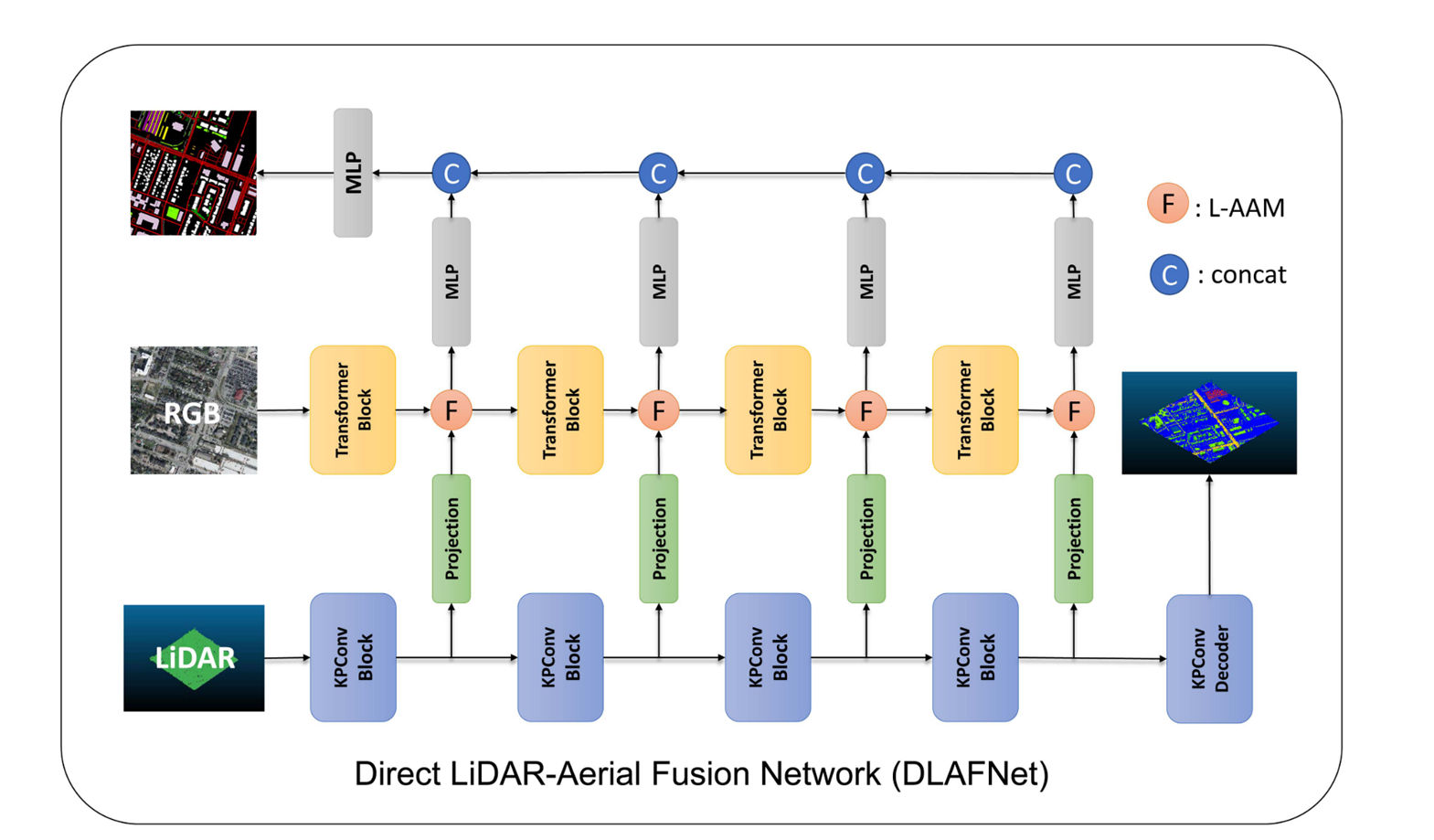
论文学习笔记 - Classifification of Hyperspectral and LiDAR Data Using Coupled ...
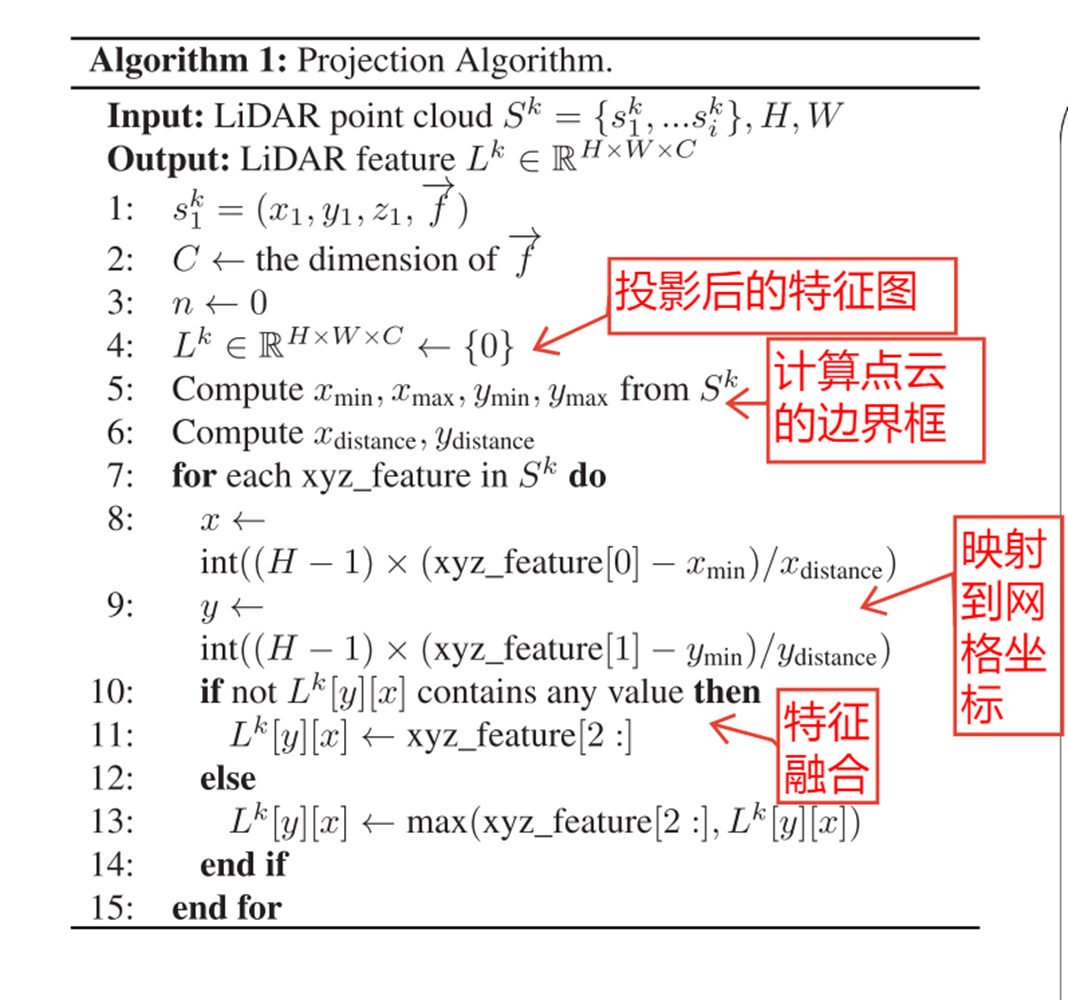
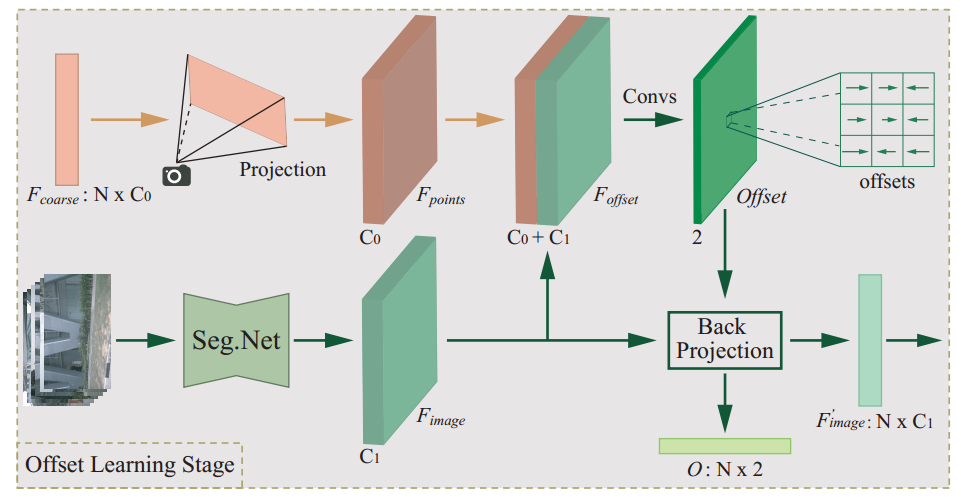
Lidar 3D传感器点云数据与2D图像数据的融合标注 - 知乎
【论文阅读16】Stereo Visual Inertial LiDAR SLAM - 知乎
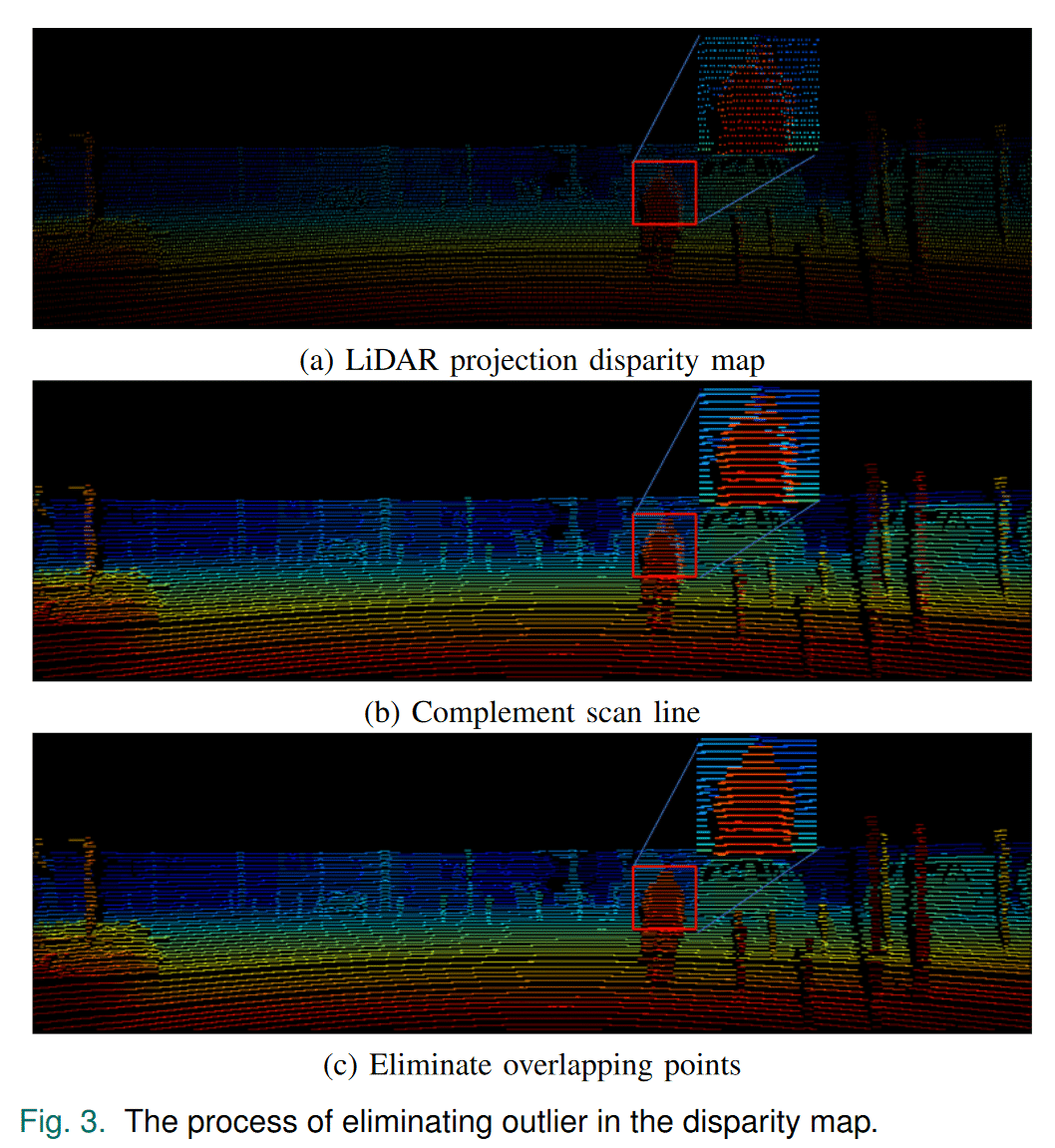
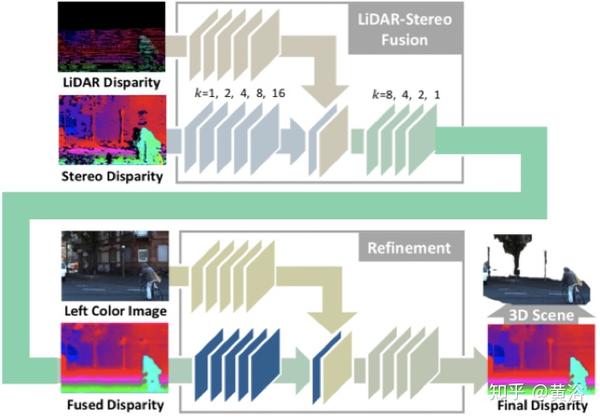
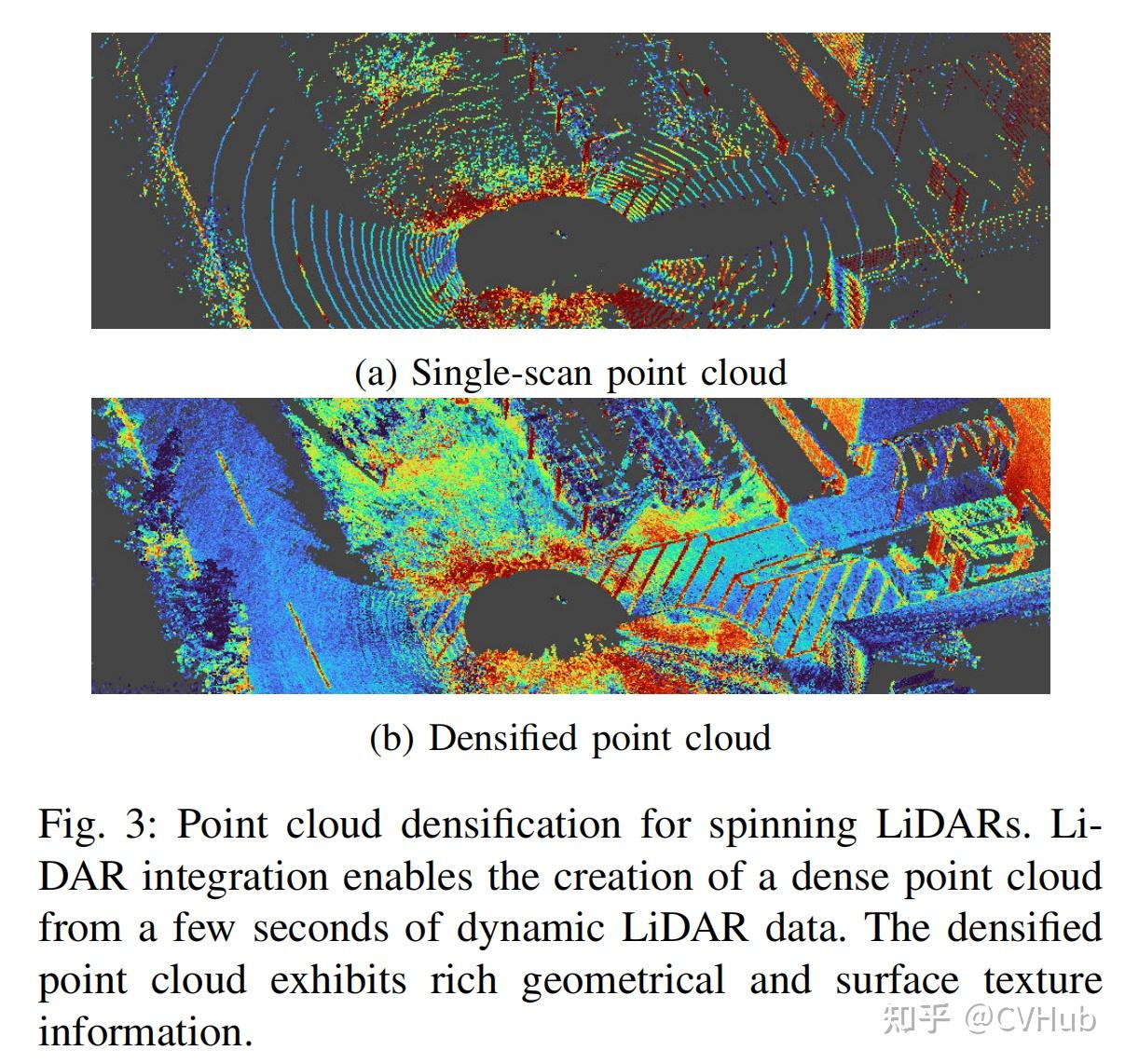
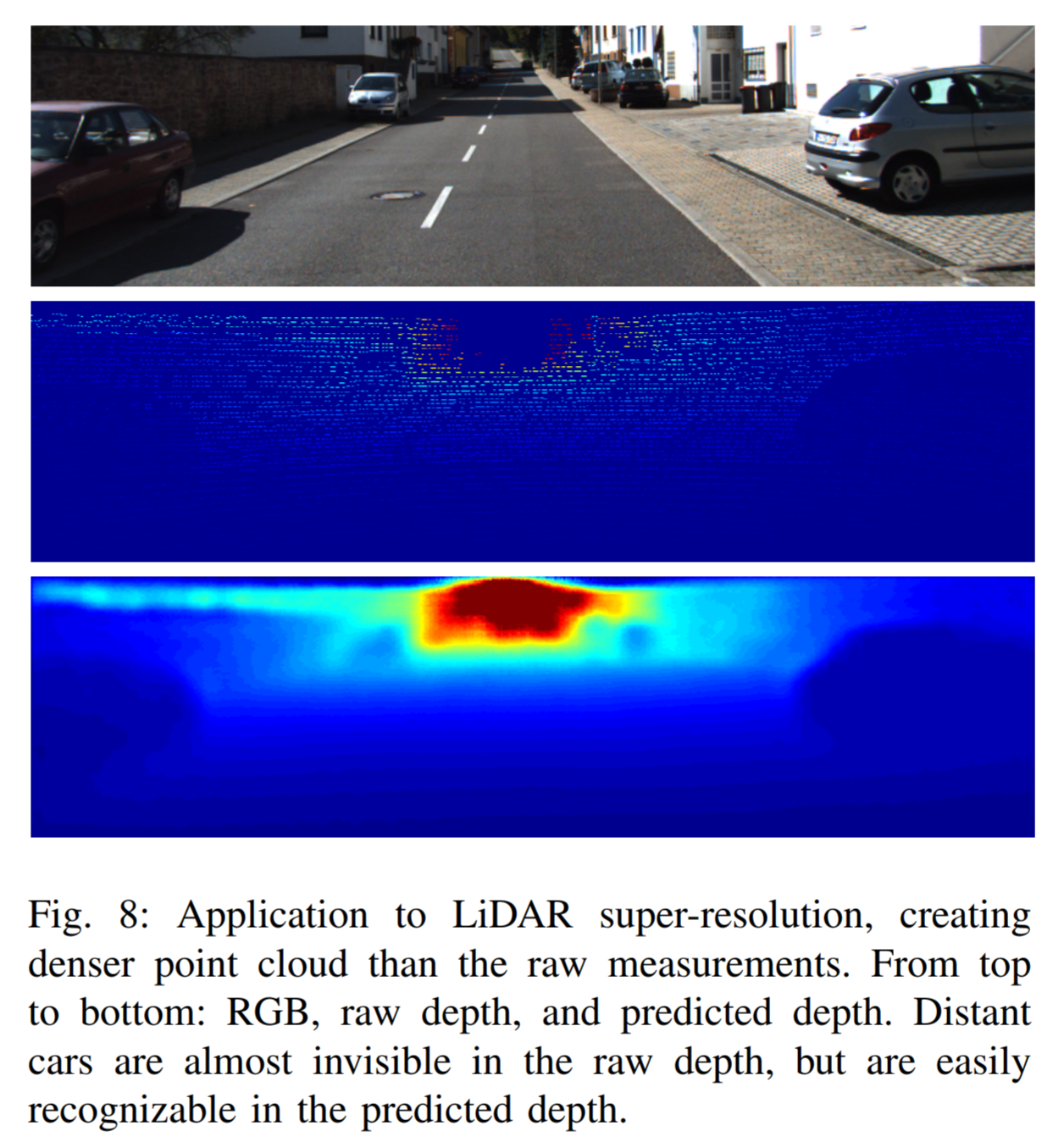
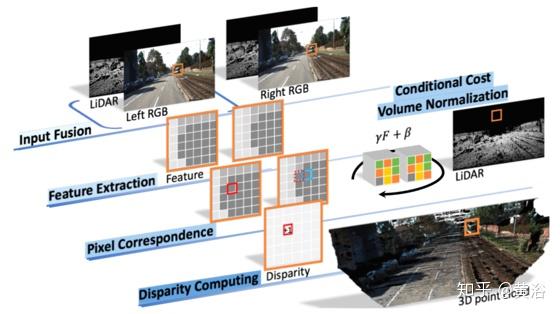
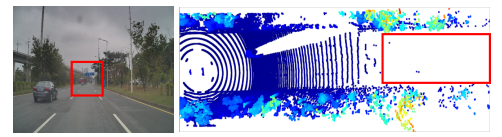
论文阅读:High-Precision Depth Estimation Using Uncalibrated LiDAR and ...
传感器融合-数据篇 - 知乎
ICRA2023 | 通用、自动和无标定目标的Lidar-Camera外参标定工具箱 - 知乎
【论文速递1-12】深度估计方向优质的论文及其代码 - 知乎
介绍几篇图像融合相关的论文 - 知乎
LiDAR-Camera融合技术:深度感知与三维目标检测的革新 - 懂AI
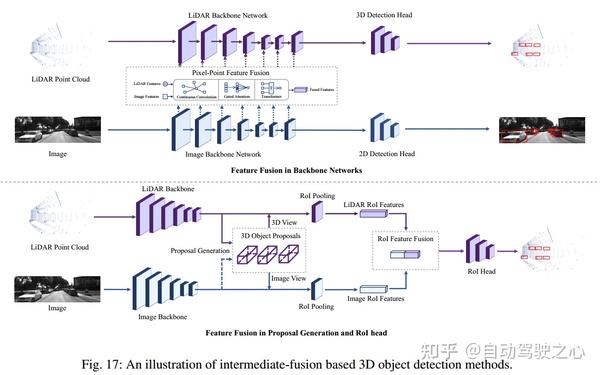
两万字综述:自动驾驶中基于Lidar点云的3D目标检测深度学习方法 - 知乎
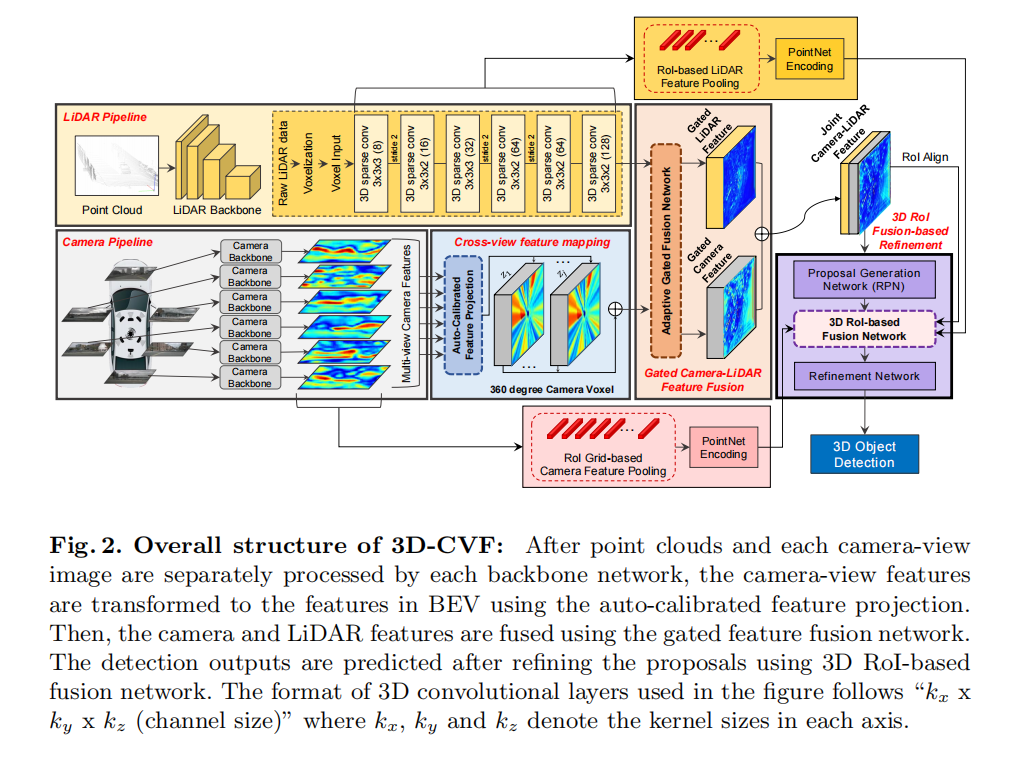
2020ECCV——3D-CVF(有效融合RGB和LIDAR点云特征的方法,多模态) - 知乎
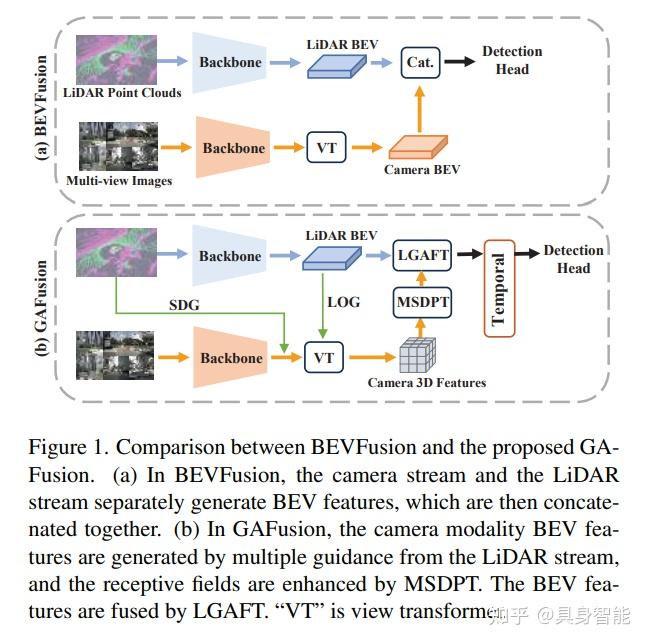
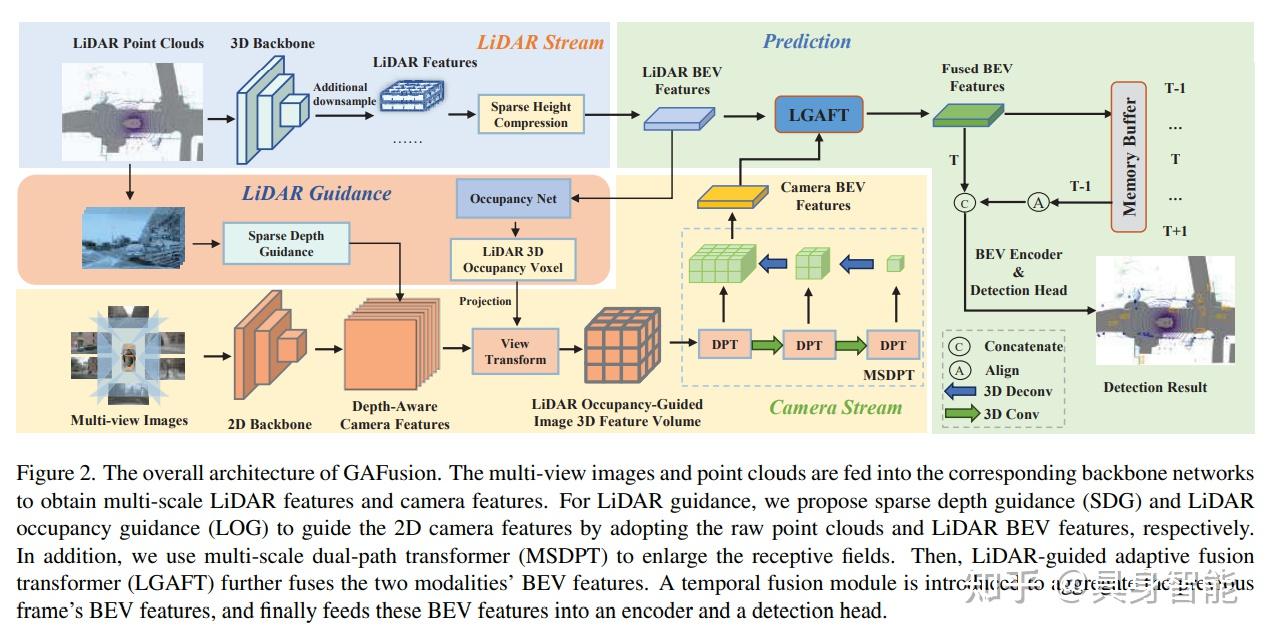
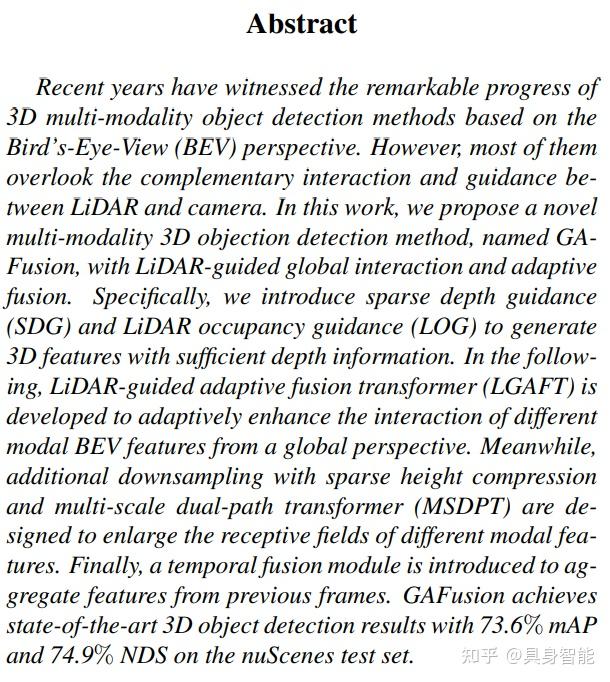
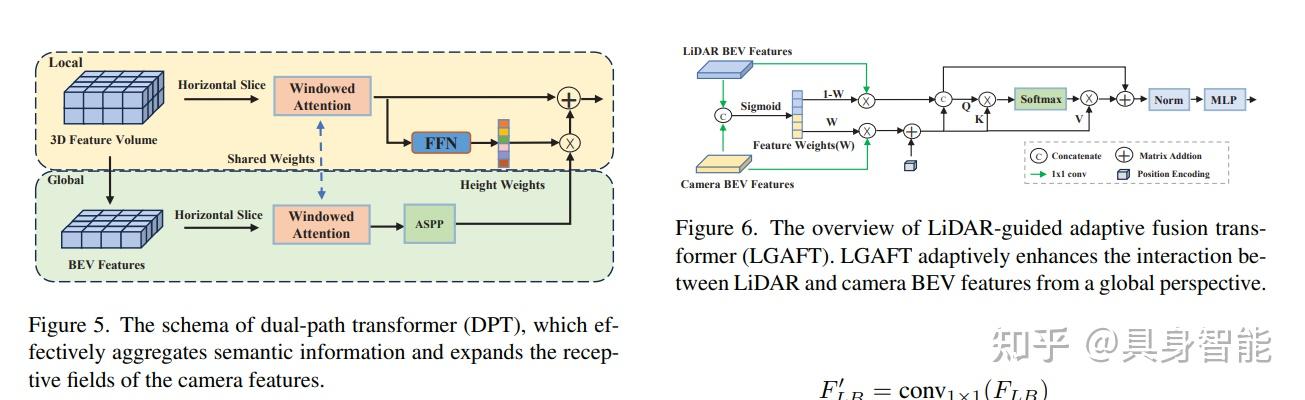
CVPR 2024 | GAFusion:多向导引下的适应性融合LiDAR和摄像头的3D目标检测 - 知乎
史上最全综述 | 3D目标检测算法汇总!(单目/双目/LiDAR/多模态/时序/半弱自监督) - 知乎
多传感器数据深度图的融合:最近基于深度学习的方法 - 知乎
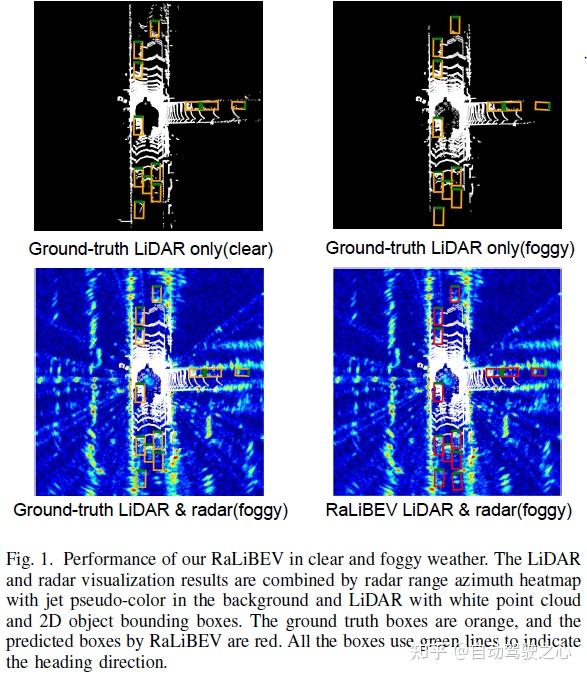
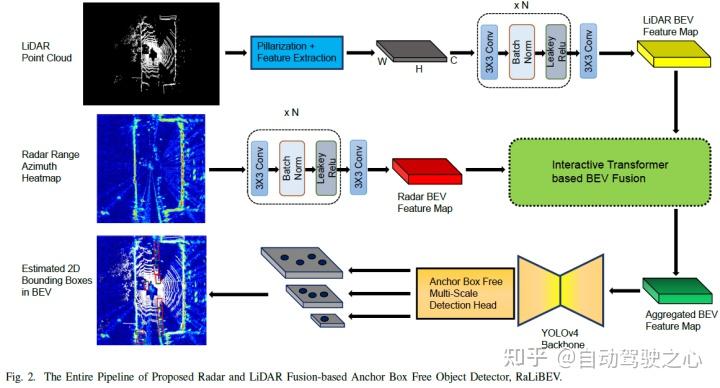
RaLiBEV:恶劣天气下的Radar和Lidar融合检测方法 - 知乎
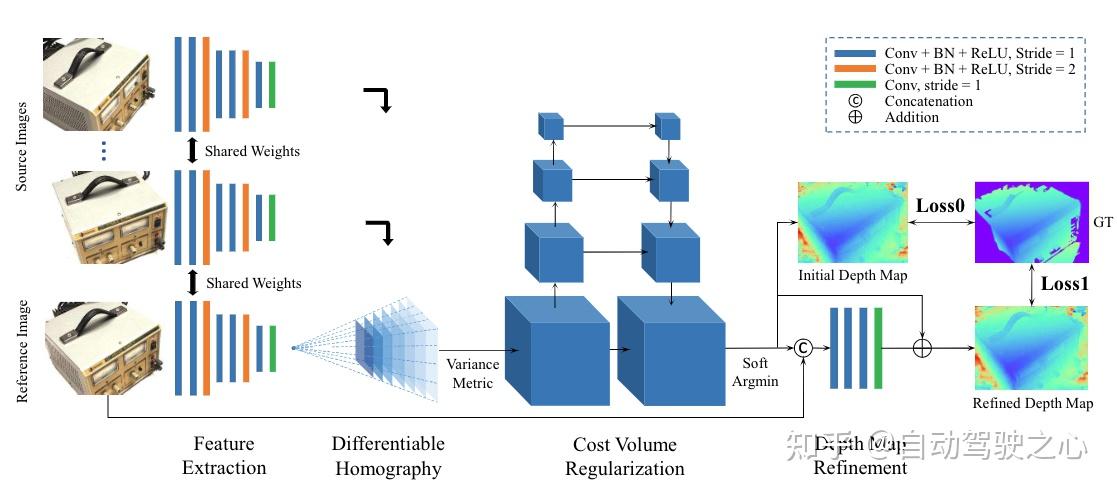
如何对基于深度学习的多视图三维重建的论文复现? - 知乎
一文了解激光雷达(Lidar)工作原理,及雷达(Radar)、点云数据相关技术与应用领域 - 知乎
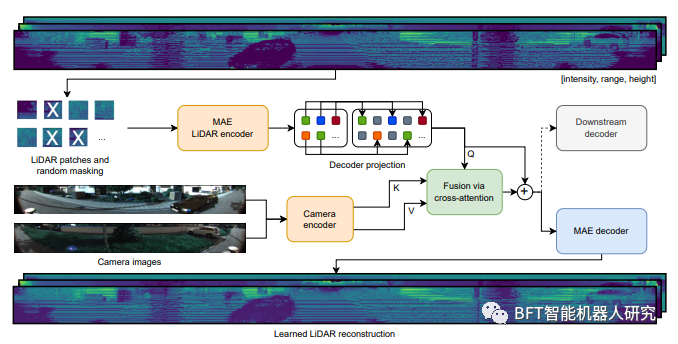
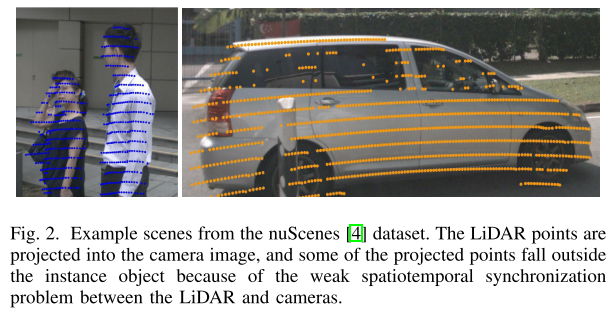
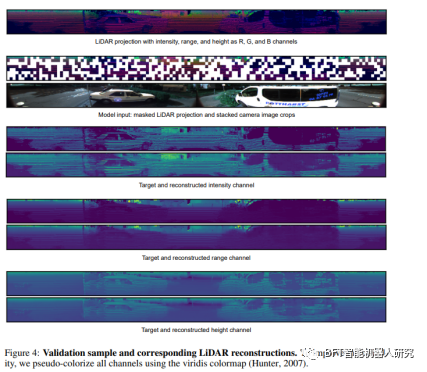
论文解读|MaskedFusion360:通过查询相机特征重建LiDAR数据 - 知乎
论文阅读:LIF-Seg: LiDAR and Camera Image Fusion for 3DLiDAR Semantic ...
双目深度估计 立体匹配 论文综述及数据集汇总 Deep Stereo Matching paper review and dataset_双目 ...
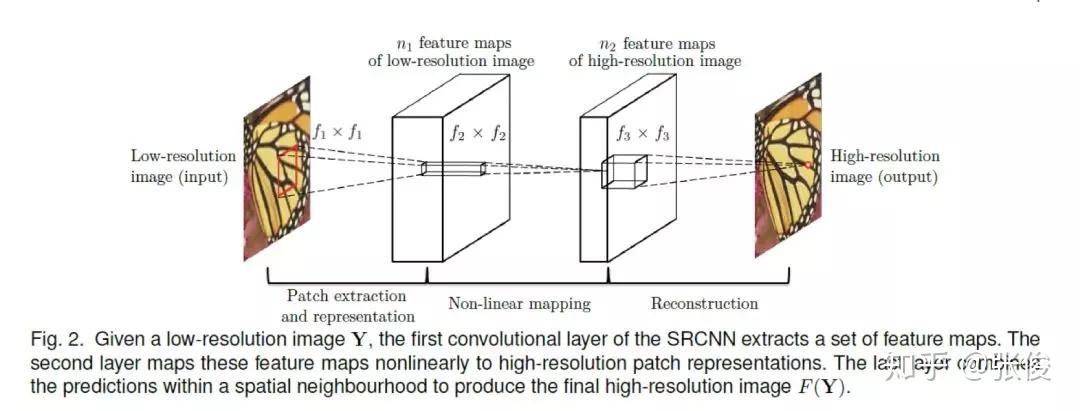
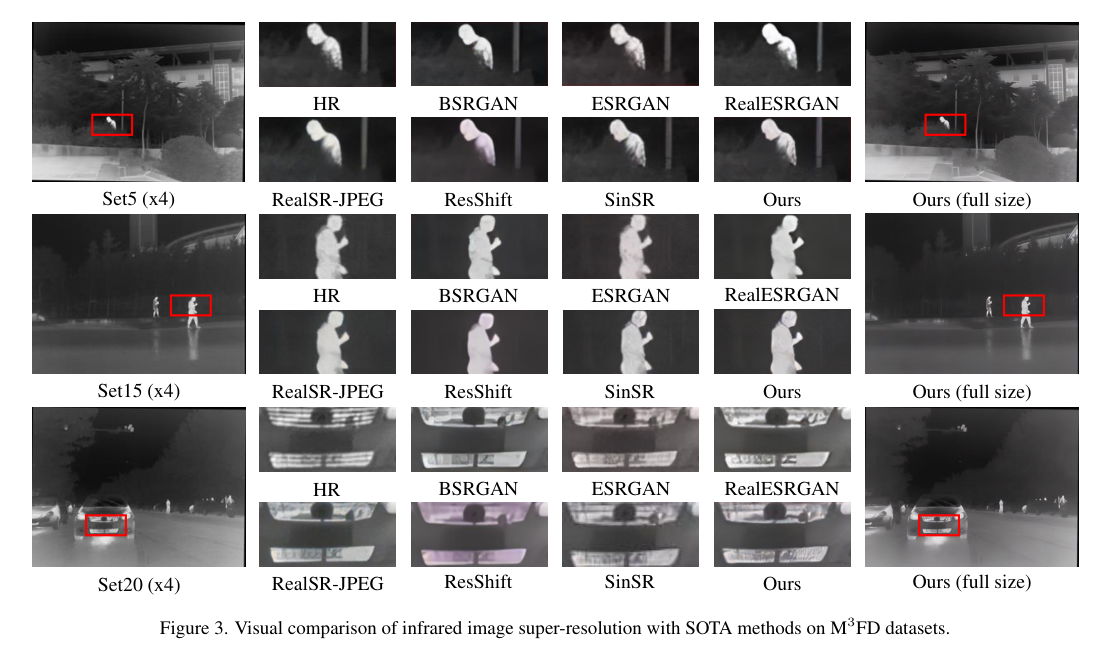
经典论文复现:基于深度学习的图像超分辨率重建 - 知乎
CVPR2023|Gated Stereo:如何利用多视角和TOF强度线索进行深度估计 - 知乎
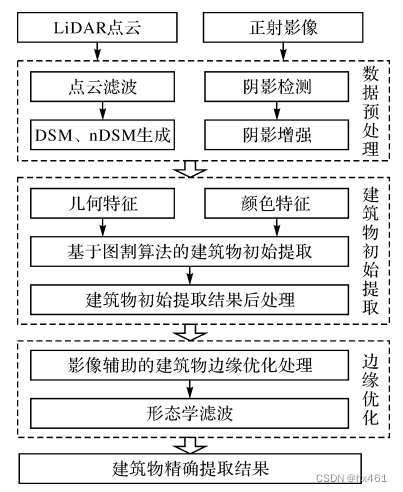
论文阅读-1:融合 LiDAR 点云与正射影像的建筑物图割优化提取方法 2018_lidar和图像融合提取植被-CSDN博客
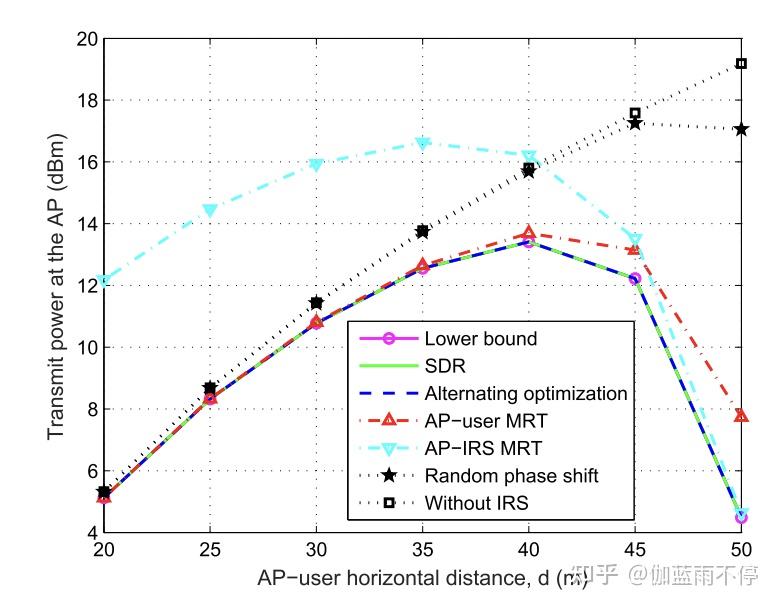
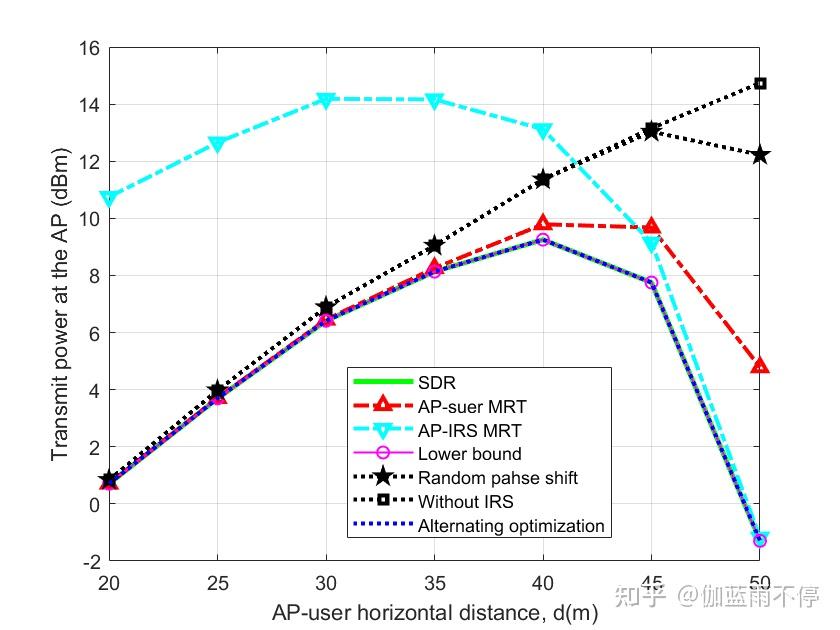
智能反射面(IRS)波束赋形经典论文复现 - 知乎
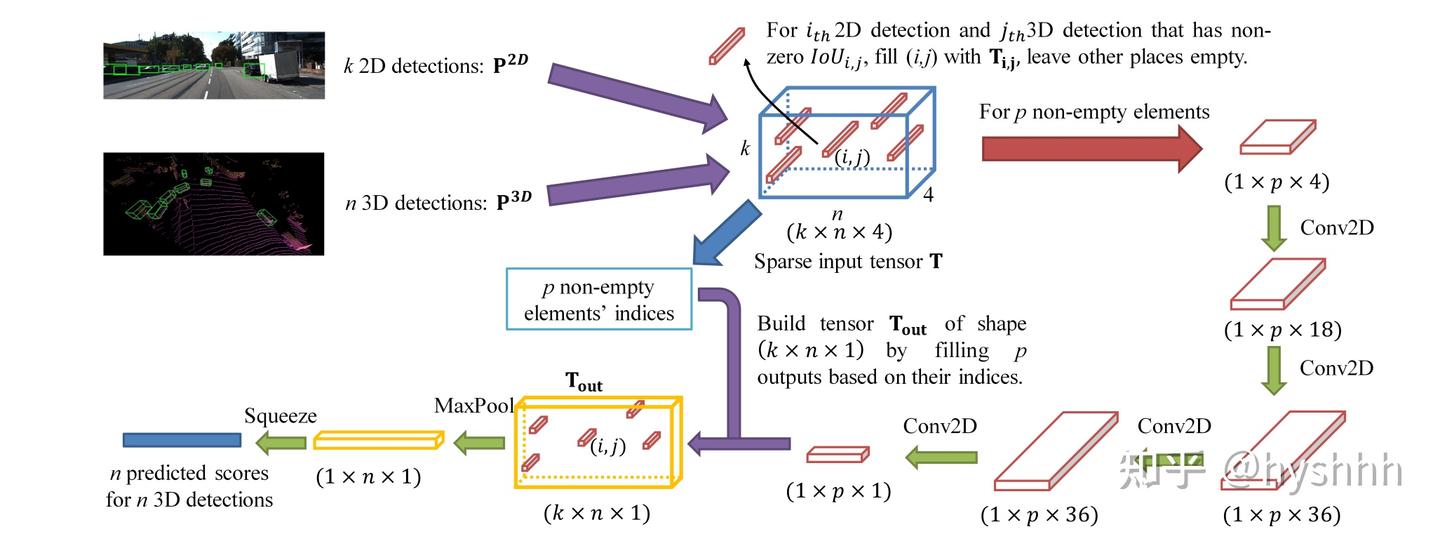
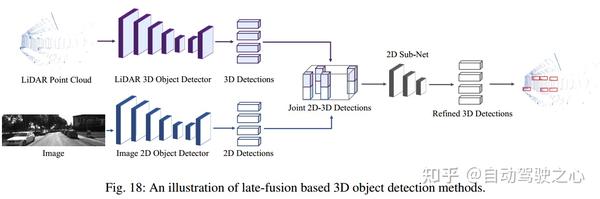
【融合】相机与雷达决策级融合——一文看懂CLOCS(Camera-LiDAR Object Candidates) - 知乎
史上最全 | BEV感知算法综述(基于图像/Lidar/多模态数据的3D检测与分割任务) - 知乎
【立体匹配--深度学习】(粗读) - 仓颉ZL - 博客园
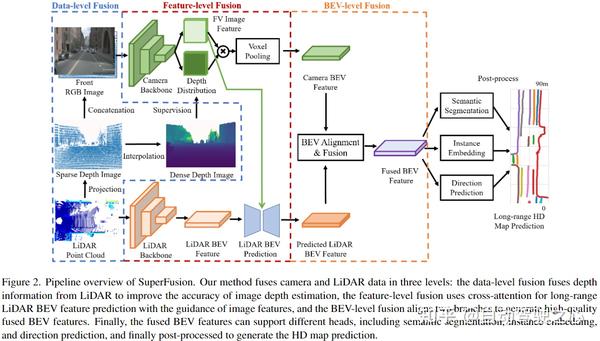
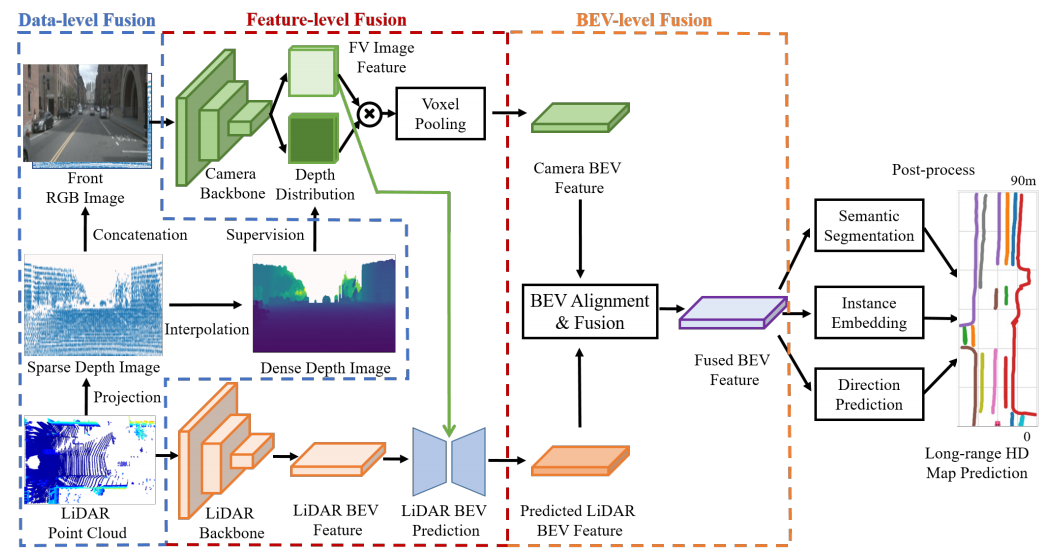
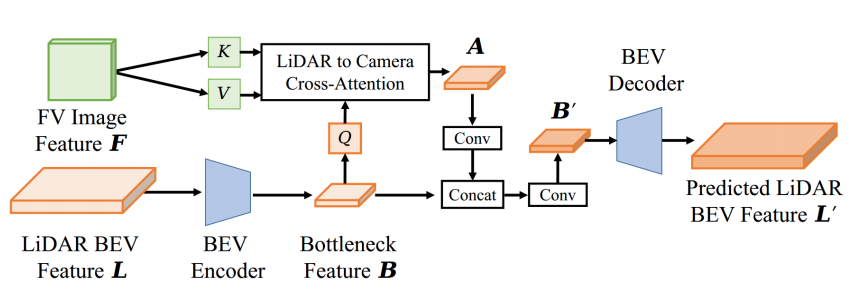
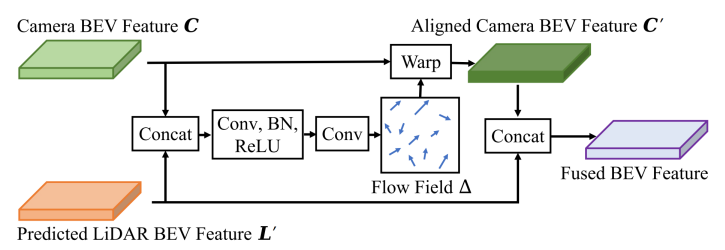
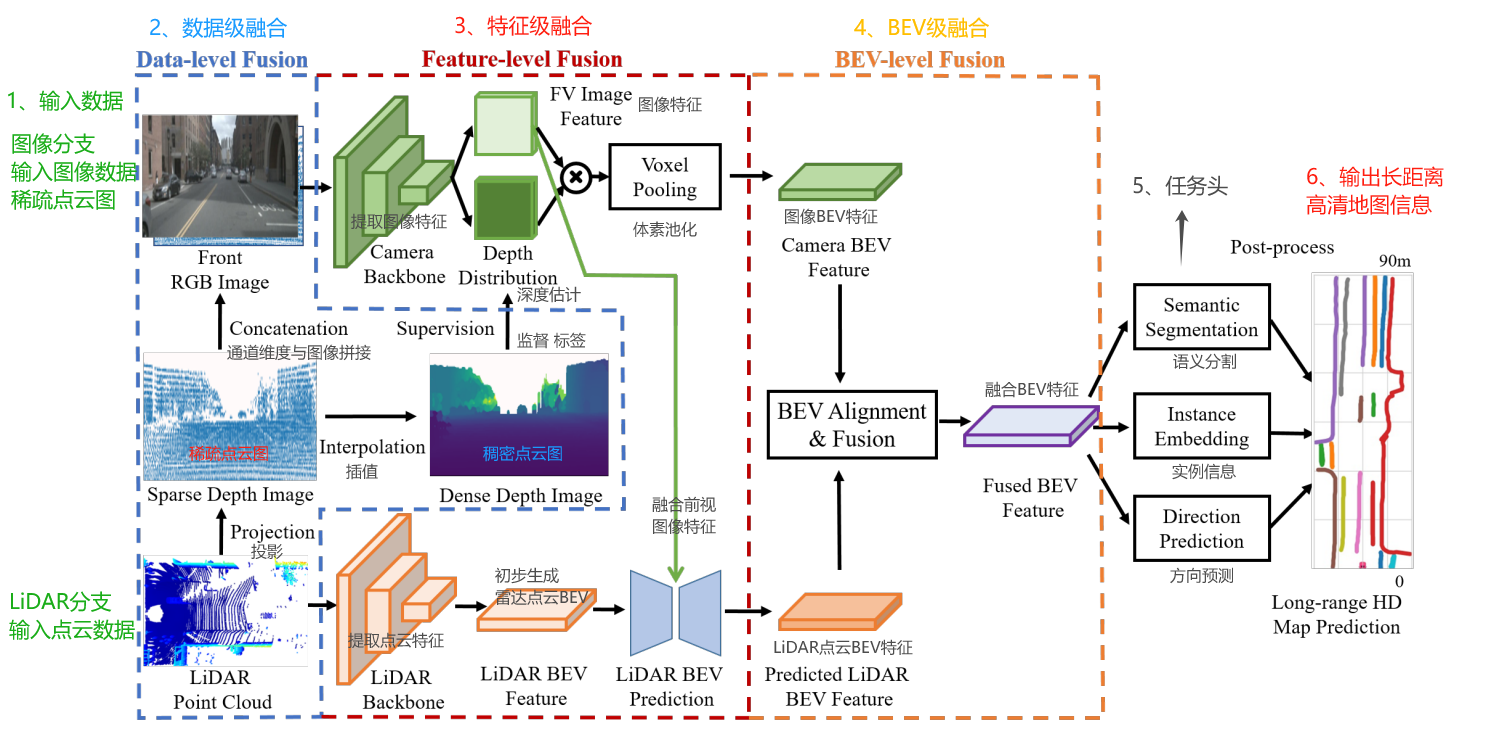
高精地图新基线 | SuperFusion:多层次Lidar-Camera融合,nuScenes SOTA! - 知乎
论文阅读《Nonparametric Background Model-Based LiDAR SLAM in Highly Dynamic ...
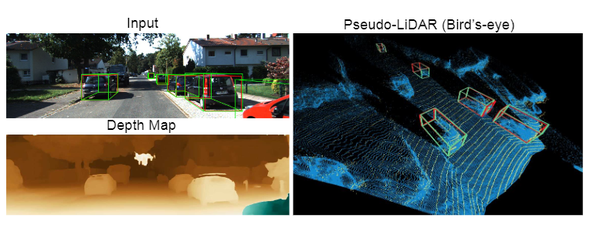
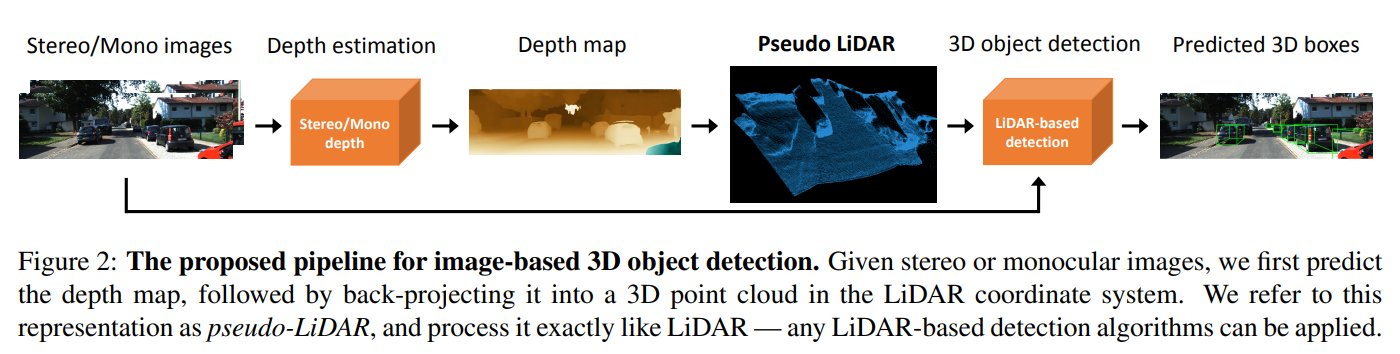
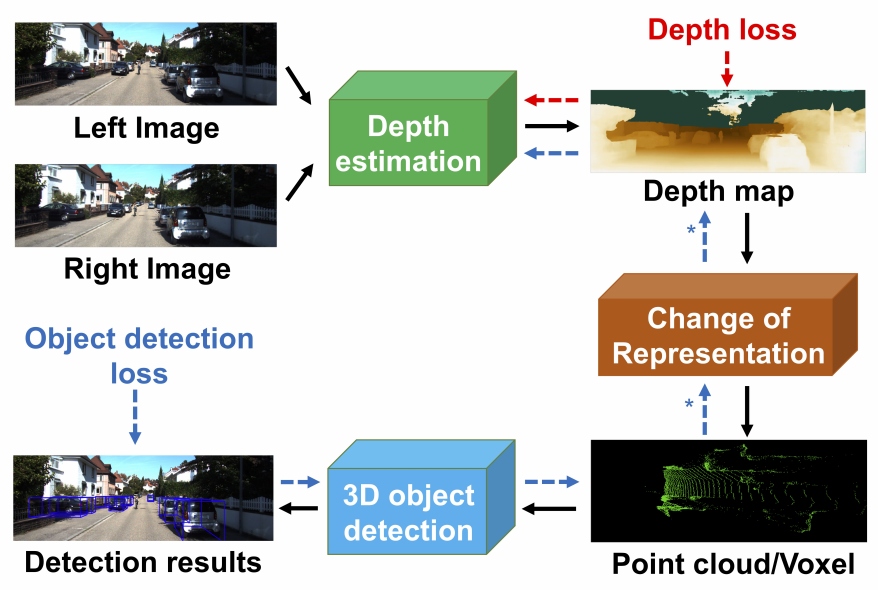
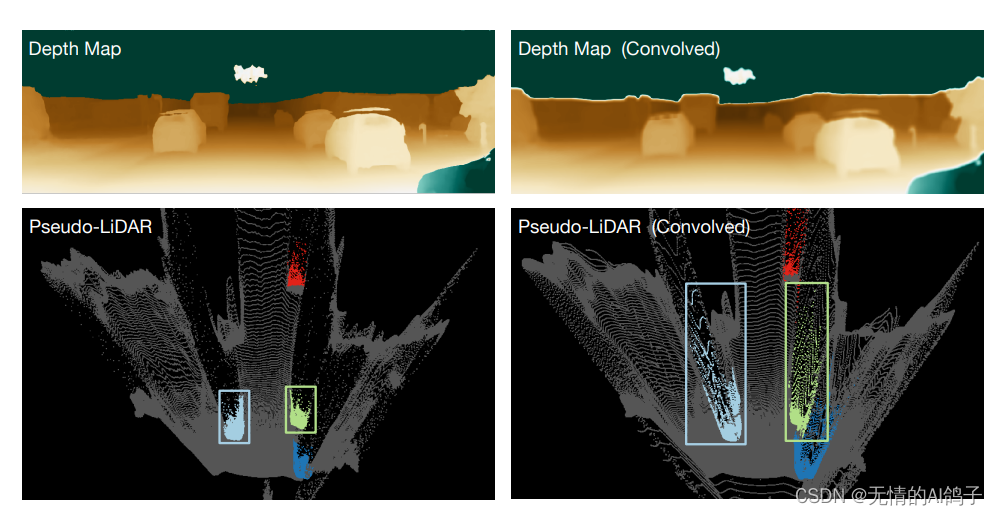
Pseudo-LiDAR from Visual Depth Estimation - 知乎
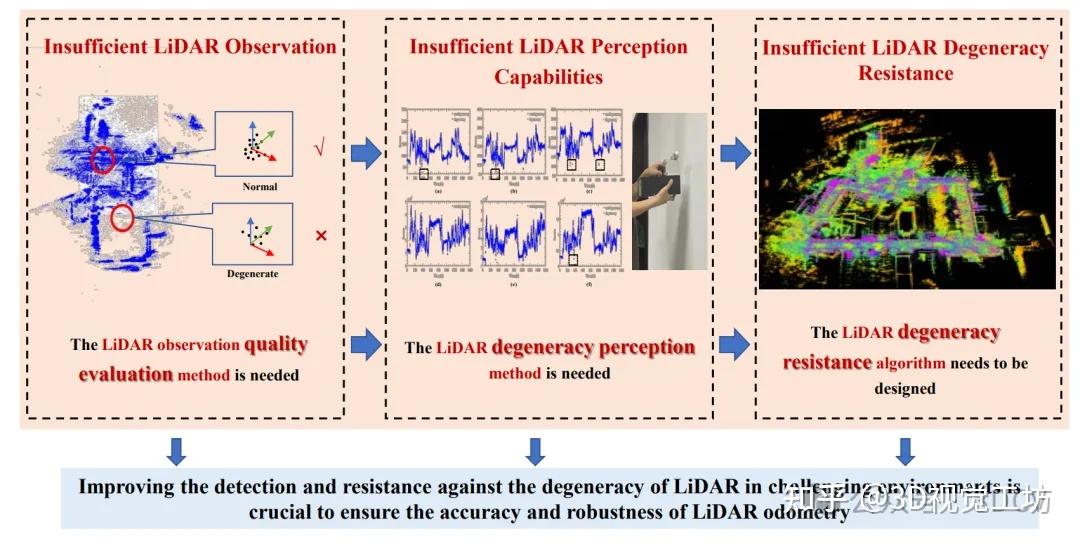
武汉大学珞珈实验室新作!退化环境下LiDAR SLAM的实时感知和补偿算法! - 知乎
3D目标检测之图像深度转为伪雷达信号:Pseudo-LiDAR from Visual Depth Estimation - bupt213 ...
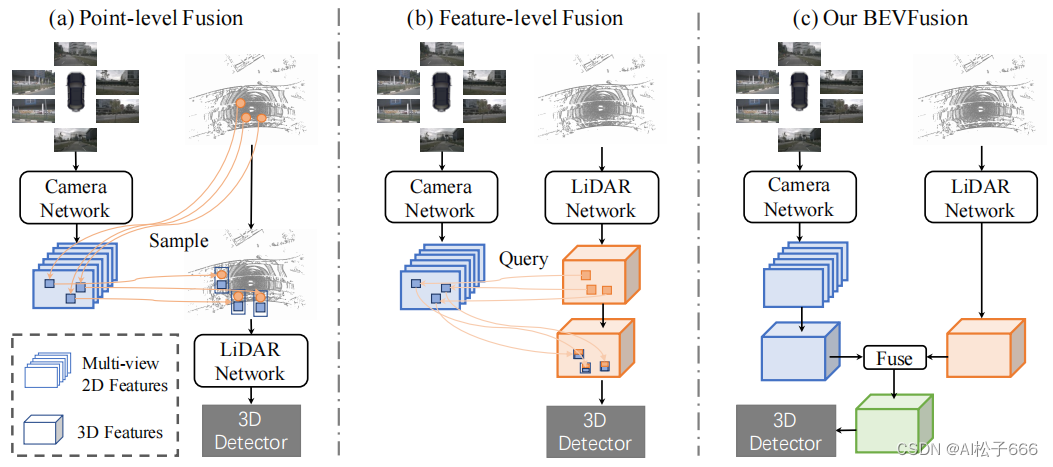
多模态融合-BEVFusion解读(一) - 知乎
【论文阅读15】LiDAR-Camera Fusion for 3D Reconstruction - 知乎
【2024年3月7日】 论文 - 知乎
【11月15日】十篇(将)开源论文代码分享 - 知乎
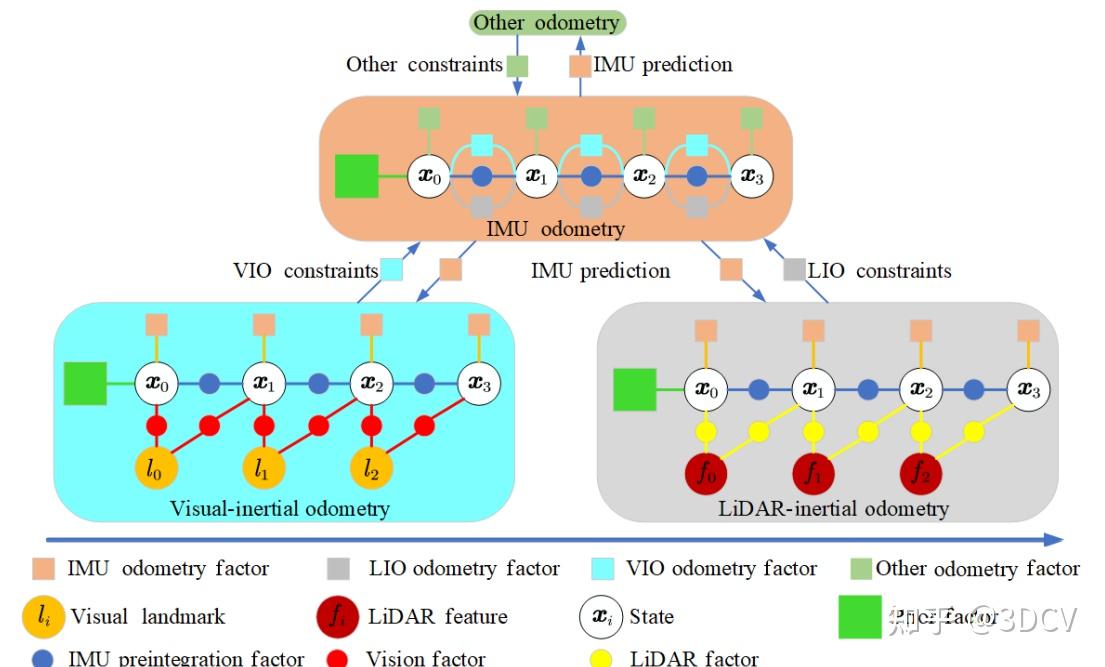
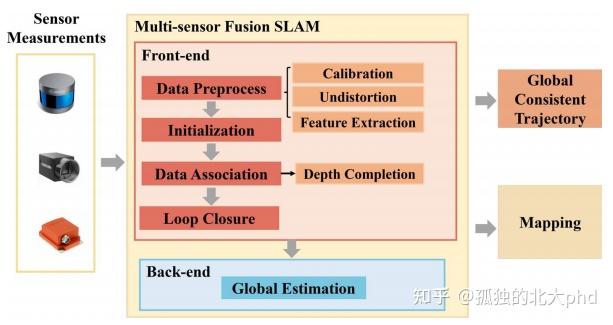
最新综述!基于相机、LiDAR和IMU的多传感器融合SLAM - 知乎
SLAM的“三体”融合:LiDAR、IMU与相机协同 - 知乎
三. LiDAR和Camera融合的BEV感知算法-融合算法的基本介绍 - 技术分享 - 云服务器
论文:SupFusion提高LiDAR和相机检测能力 — 漫话开发者 - UWL.ME
基于深度学习的双目深度估计算法现在进展到什么程度了? - 知乎
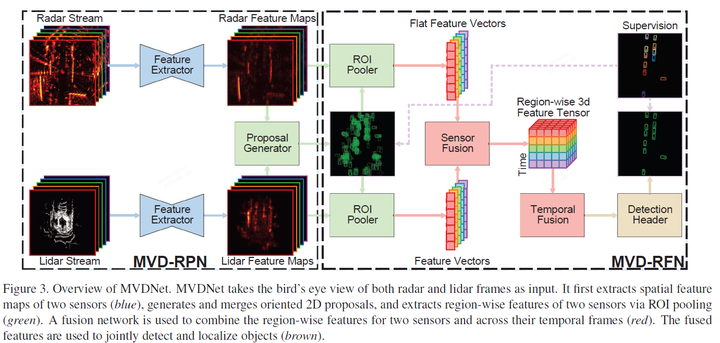
【算法论文】MVDNet:利用激光雷达和雷达信号在雾天中进行稳健的多模态车辆检测 - 知乎
【2025年3月4日】 论文 - 知乎
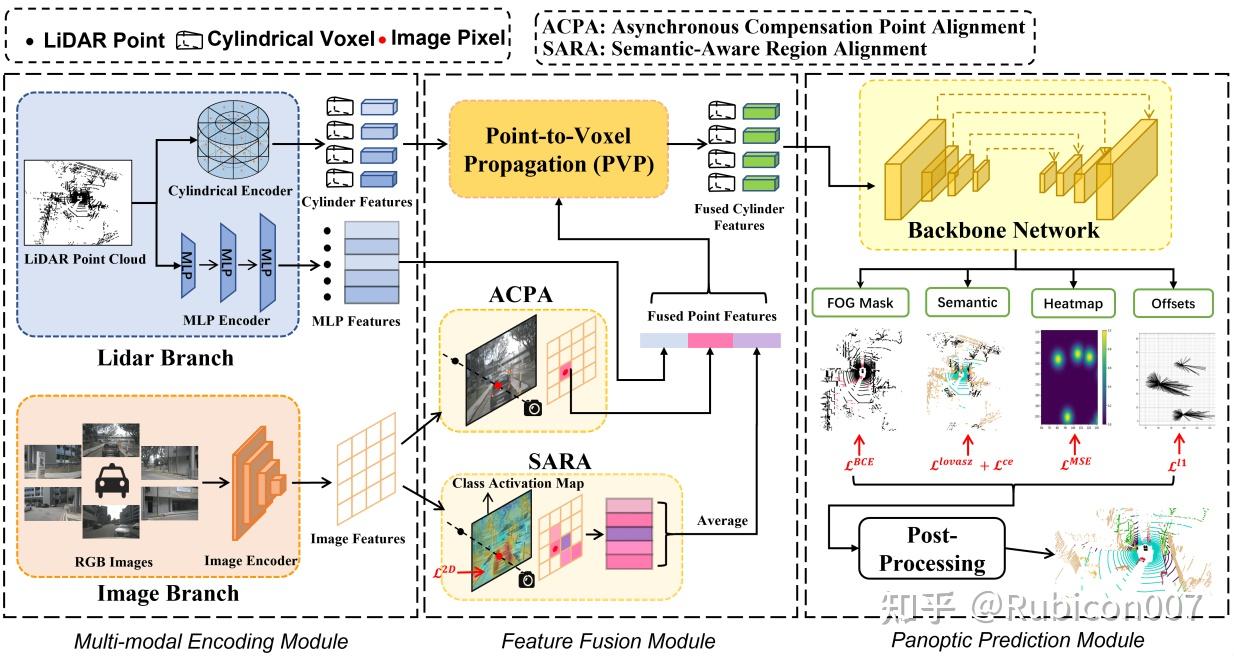
基于几何一致性和语义感知对齐的LiDAR-相机全景分割 - 知乎
论文解读 Robust Real-time LiDAR-inertial Initialization (IROS2022) - 知乎
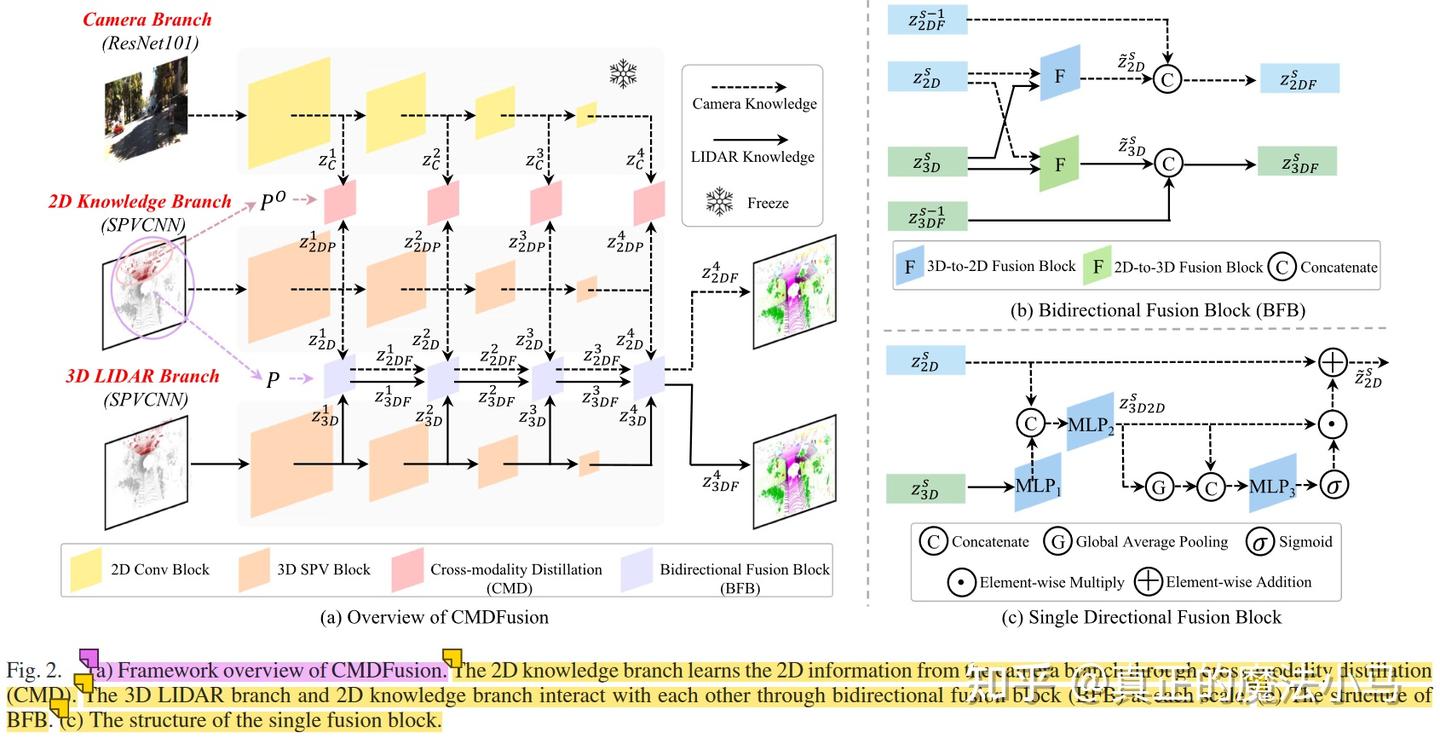
论文分享-RAL2024-CMDFusion:用于LiDAR语义分割的具有跨模态知识提取的双向融合网络 - 知乎
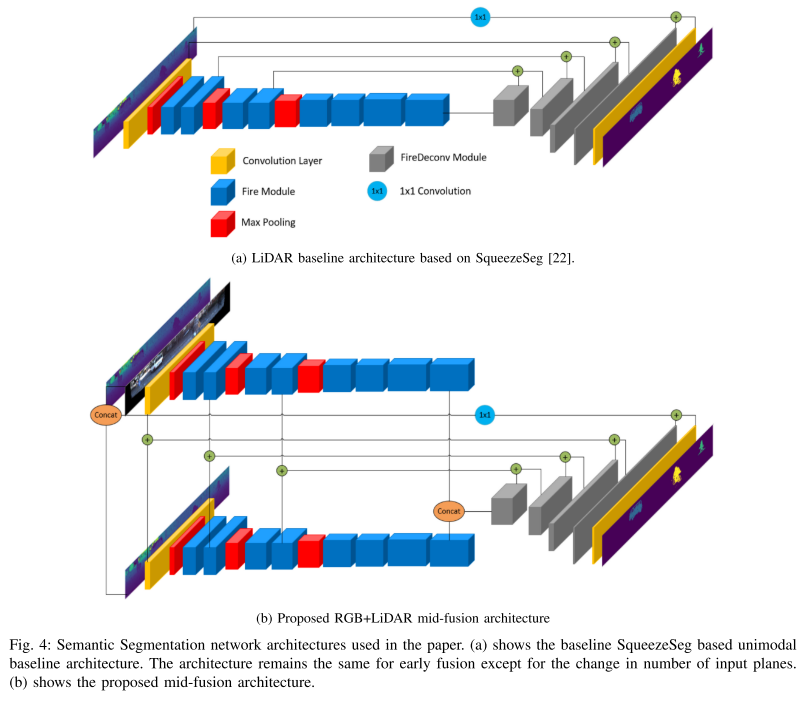
论文阅读:RGB and LiDAR fusion based 3D Semantic Segmentationfor Autonomous ...
双目深度估计中的自监督学习概览 - 知乎
动手学多传感器融合定位(二):自动驾驶、机器人和无人机中常用的传感器以及融合思路 - 知乎
北大+上海AI Lab提出LiDAR-LLM | 首个提出将几何LiDAR数据转换为LLM可理解的代表空间的方法 - 知乎
论文解读 | IROS 2022:基于三维激光雷达的语义位置识别和姿态估计 - 哔哩哔哩
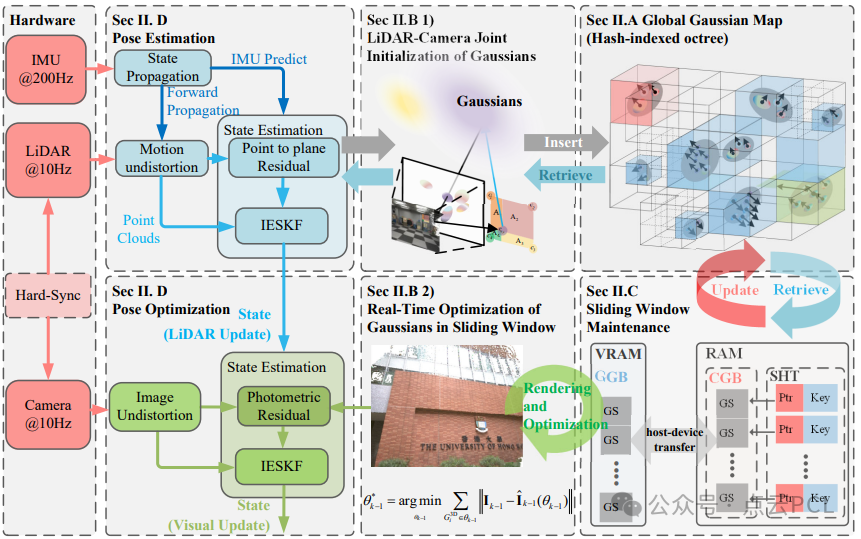
GS-LIVO:基于高斯泼溅的实时LiDAR、惯性和视觉多传感器融合里程计 - 知乎
新闻详情页
图像-LIDAR融合方式 一些论文_激光和图像融合-CSDN博客
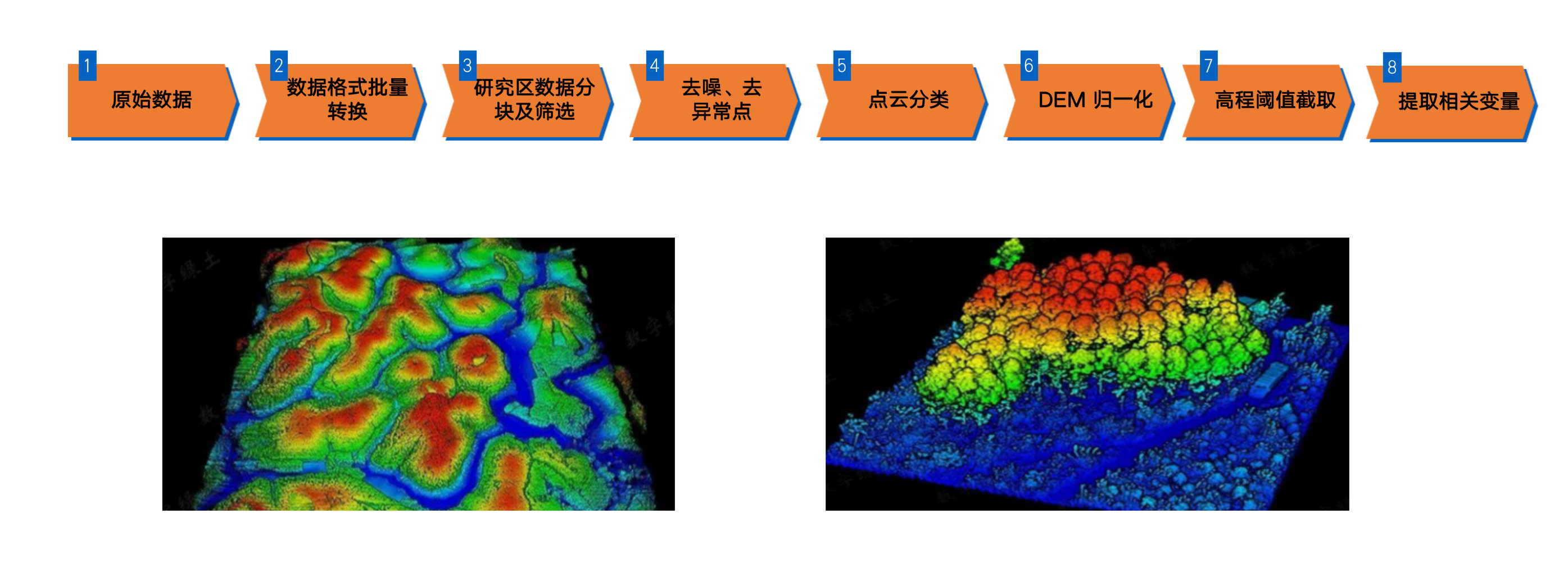
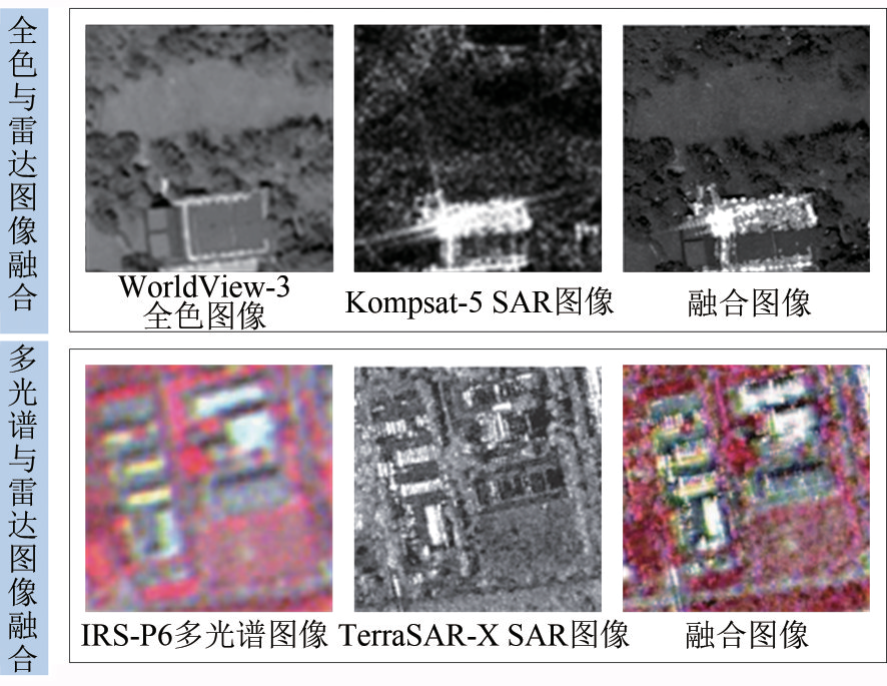
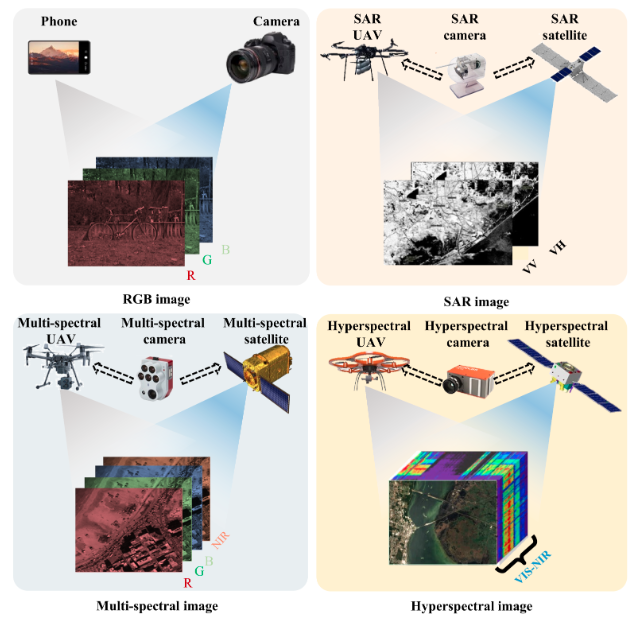
遥感数据类型-CSDN博客
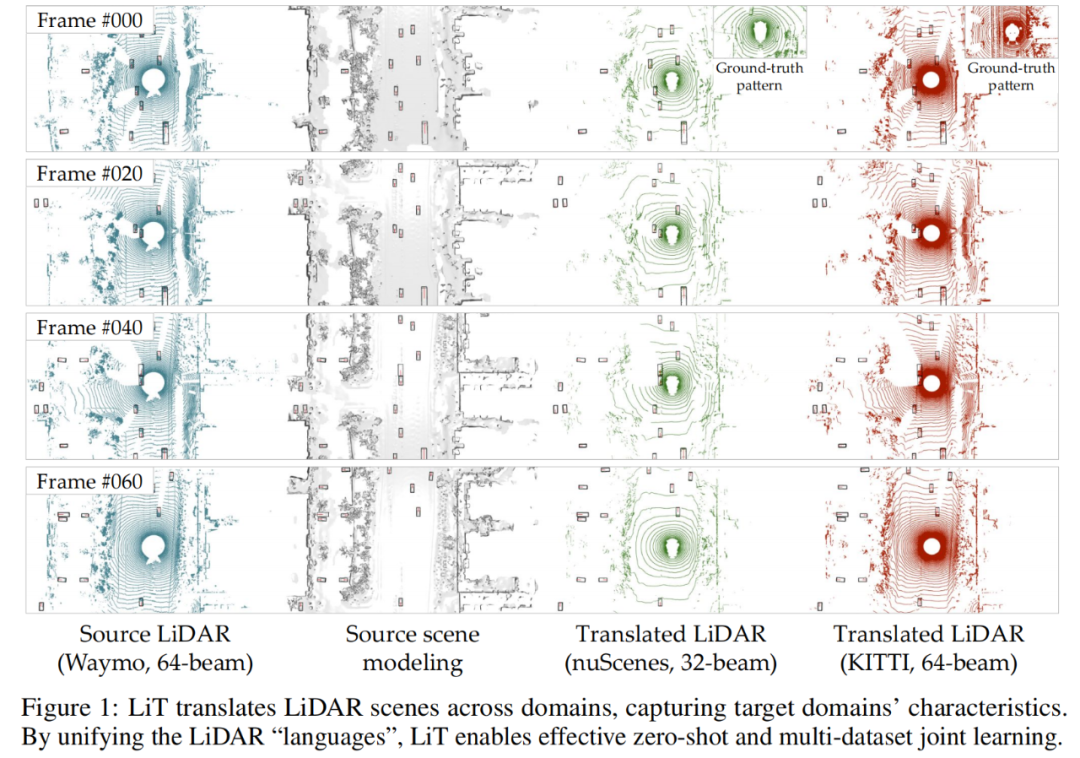
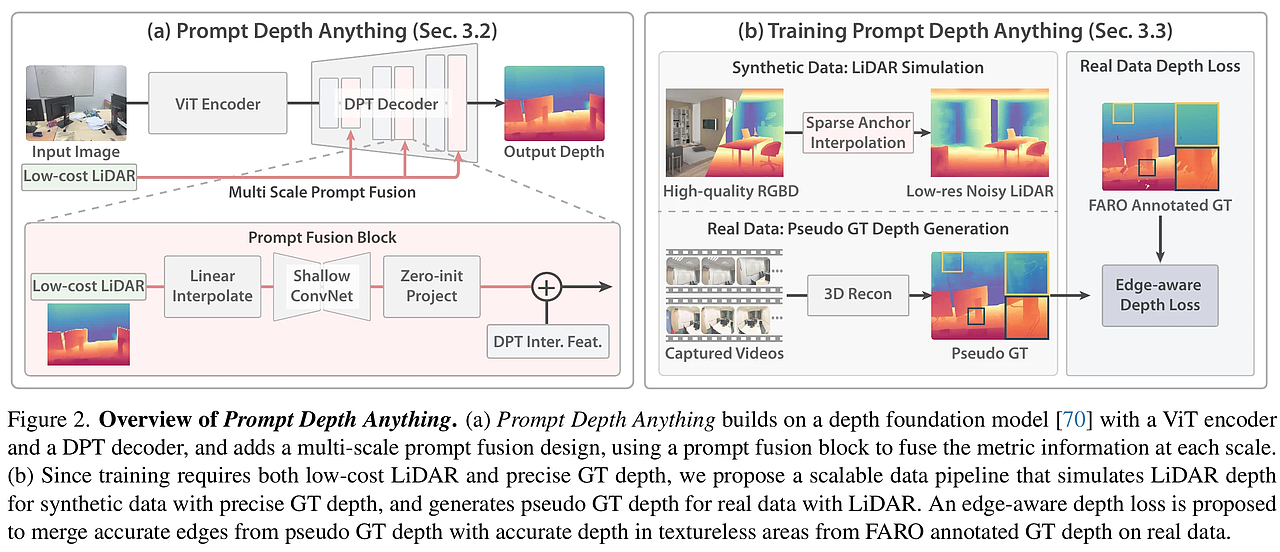
PaperDaily(12-20|4) 空间感知与地理信息系统:通过LiDAR Prompt 使用深度模型估计深度;任意分辨率、尺度和模态的 ...
综述 | 激光与视觉融合SLAM-CSDN博客
LiDAR和Camera融合的BEV感知算法-BEVFusion_bev fusion-CSDN博客
LiDAR和Camera融合的BEV感知算法-BEVFusion-CSDN博客
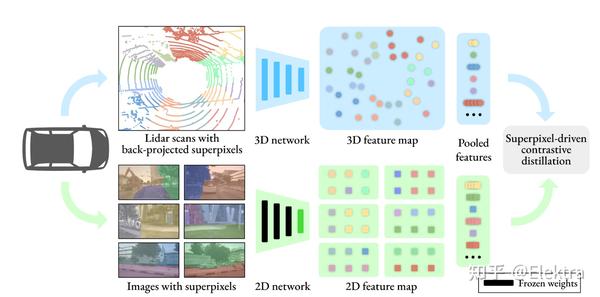
[论文阅读] Image-to-Lidar Self-Supervised Distillation for Autonomous ...
论文阅读:PMF基于视觉感知的多传感器融合点云语义分割Perception-Aware Multi-Sensor Fusion for 3D ...
2-D 图像和 3-D LiDAR点云数据融合论文讲解_2d图像和lidar的3d点云之间的配准方法-CSDN博客
LiDAR-LLM论文精读-CSDN博客
【深度补全算法】基于RGBD相机的深度补全算法(非Lidar)论文与GitHub代码总结_deep depth completion of a ...
[上海科技大学论文]相机定位增强实现视觉LiDAR点云对齐(Camera Poses Augmentation with Large ...
【论文复现】End-to-end Pseudo-LiDAR for Image-Based 3D Object Detection训练环境搭建 ...
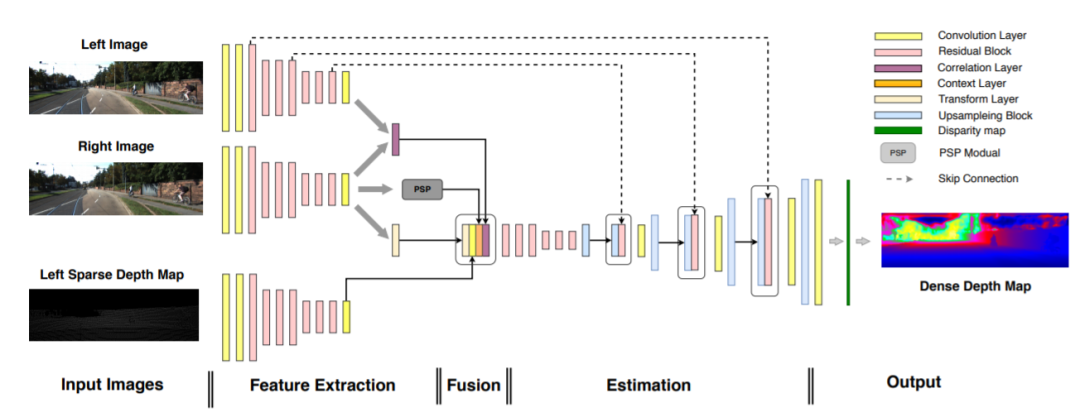
论文笔记_S2D.63_2020-ICRA_LiStereo:从雷达和双目立体图像生成稠密深度图_密集深度图-CSDN博客
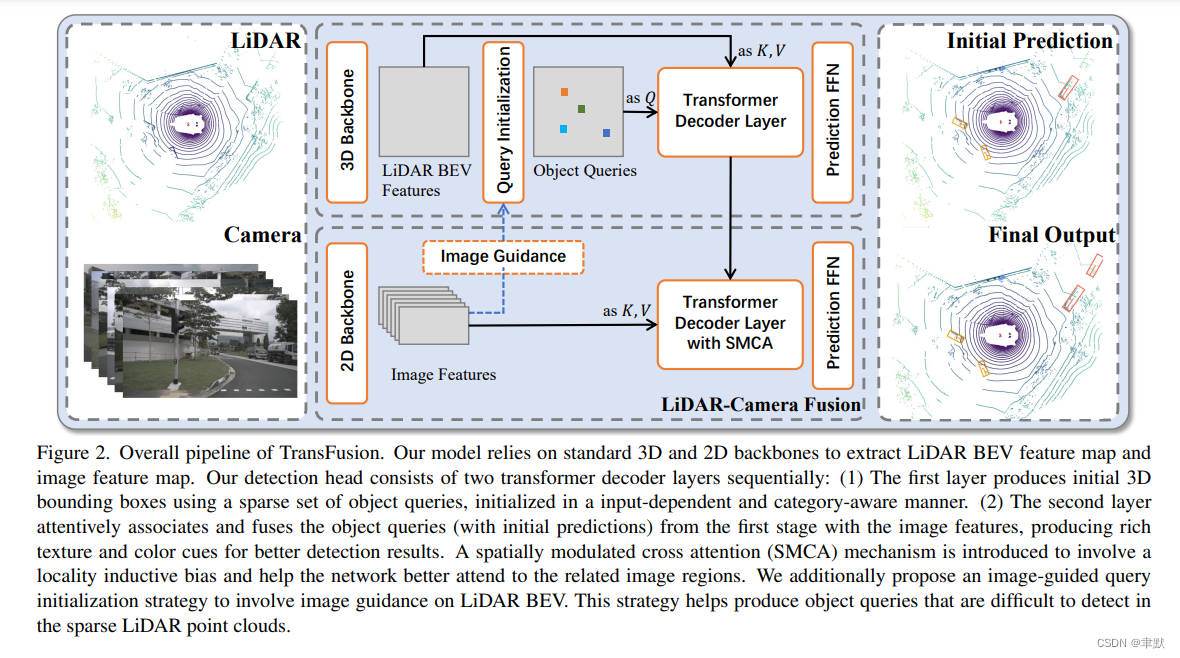
多模态融合2022|TransFusion: Robust LiDAR-Camera Fusion for 3D Object ...
【双目论文整理 未完】值得一读的双目论文整理_双目视觉论文-CSDN博客
多模态融合16篇优质论文及代码合集,含2023最新_多模态融合论文-CSDN博客
Pseudo-LiDAR 利用双目进行3D目标检测_pseudo lidar-CSDN博客
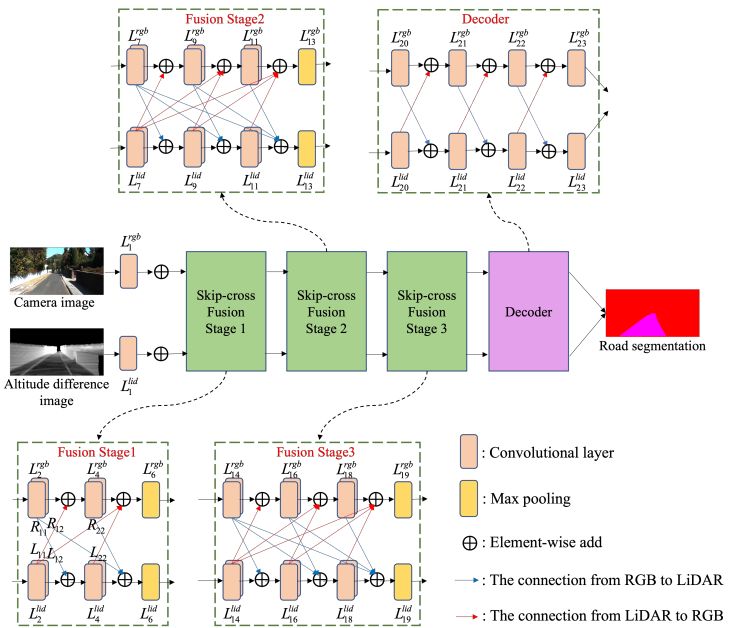
KITTI榜单新SOTA!相机-LiDAR双向融合新范式 | CVPR 2022 Oral & arXiv 2023-CSDN博客
可见光与红外光图像配准与融合论文复现——VOL.1(part1)_feature dynamic alignment and ...
【多模态融合】SuperFusion 激光雷达与相机多层次融合 远距离高清地图预测 ICRA 2024-CSDN博客
【深度估计】旷视科技|DeepLiDAR从一张彩色图像和一个稀疏深度图像生成室外场景之下的精确的稠密深度图-腾讯云开发者社区-腾讯云
三. LiDAR和Camera融合的BEV感知算法-BEVFusion_mit的bevfusion和北大的bevfusion的区别-CSDN博客
自动驾驶Lidar点云与2D图像融合原理及标注应用-开发者社区-阿里云
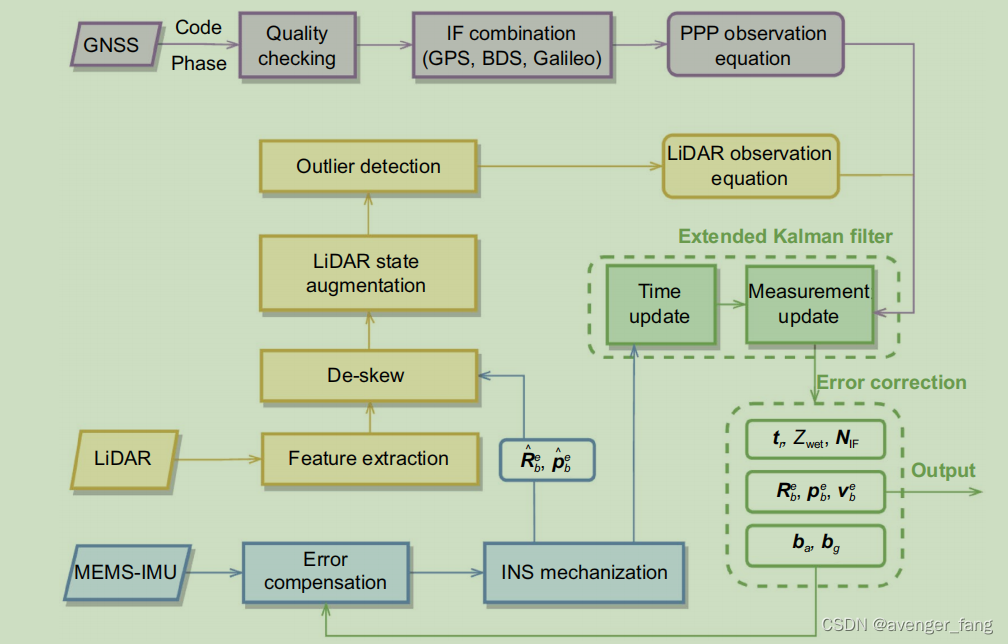
武大《GIL: a tightly coupled GNSS PPP/INS/LiDAR method for precise vehicle ...
多传感器融合算法,基于Lidar,Radar,Camera算法_lidar和camera融合算法-CSDN博客
多模态融合slam技术学习_多模态slam算法-CSDN博客
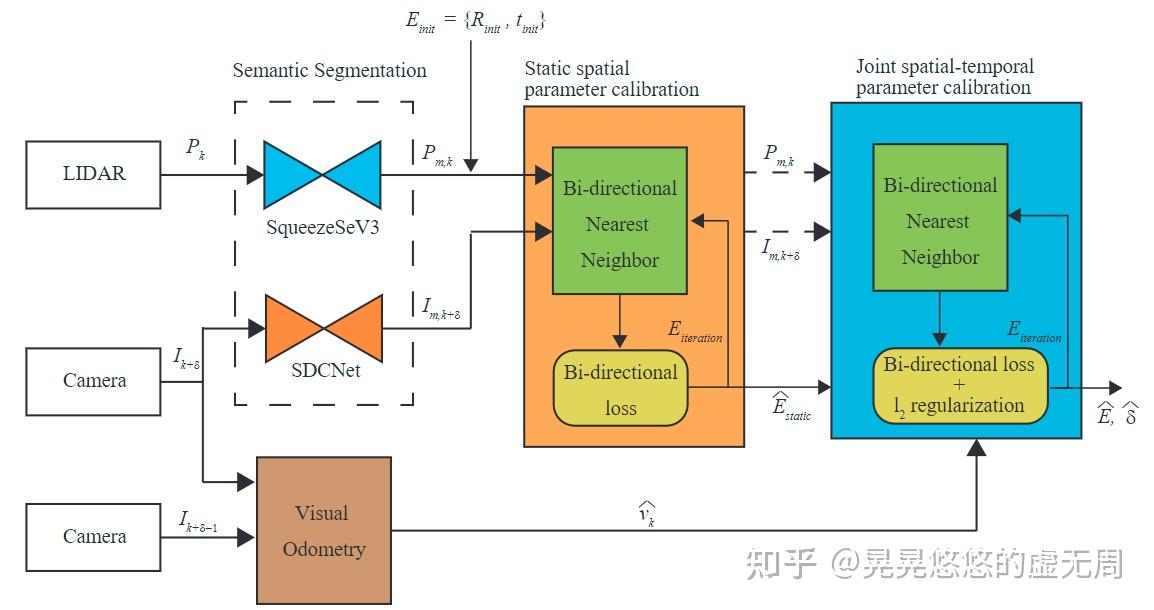
《SST-Calib: Simultaneous Spatial-Temporal Parameter Calibration between ...
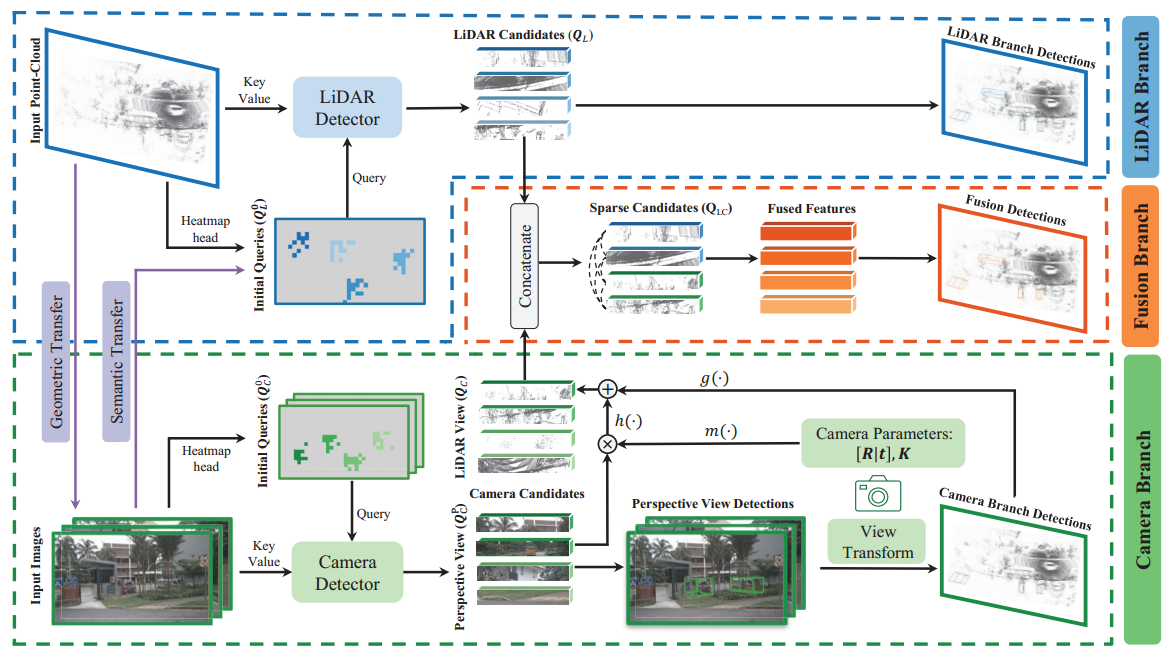
【自动驾驶】《TransFusion: Robust LiDAR-Camera Fusion for 3D Object Detection ...
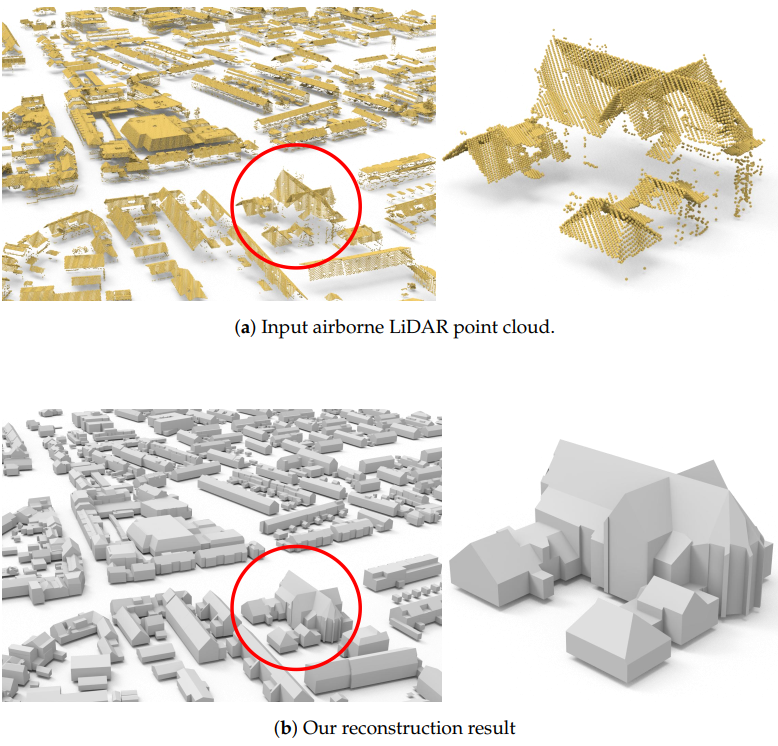
BIM与点云:一种基于航空LiDAR点云的大规模建筑重建-CSDN博客
智驾车技术栈 | 两万字综述:自动驾驶中基于Lidar点云的3D目标检测深度学习方法-腾讯云开发者社区-腾讯云
一种高光谱与LiDAR特征耦合的融合分类网络
地下环境 | 九种3D Lidar-SLAM算法评估-CSDN博客
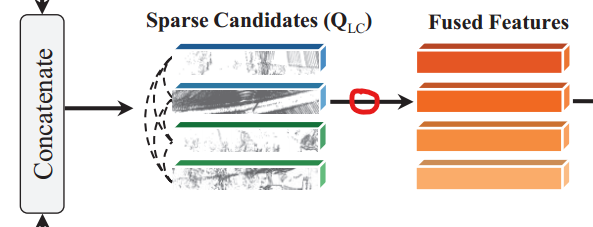
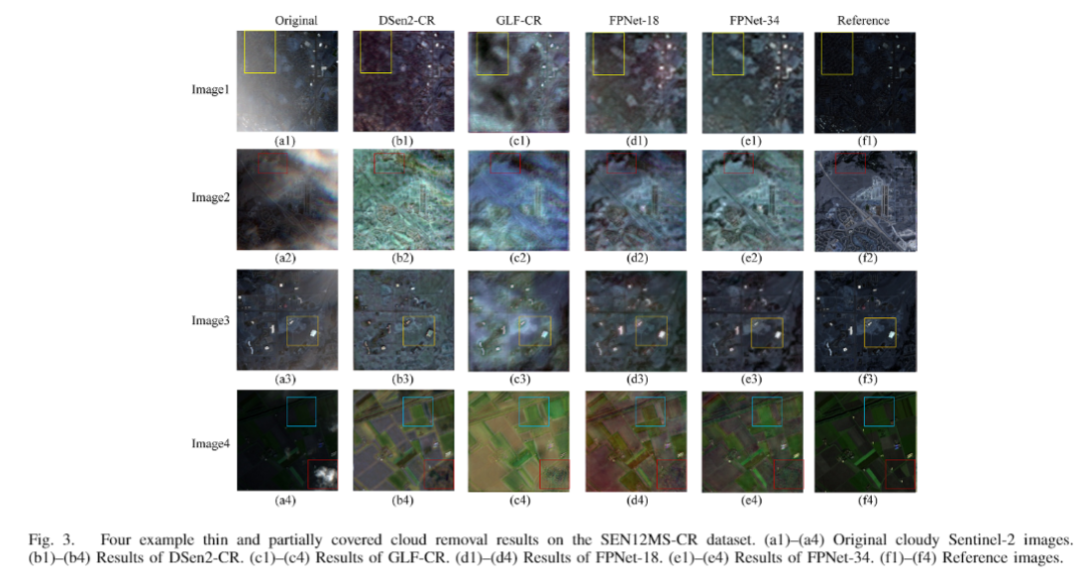
GRSL好论文|基于SAR-光学影像融合的高效卫星影像云去除网络_光学sar融合去云-CSDN博客
HyperGlobal-450K:全球最大规模的高光谱图像数据集-CSDN博客
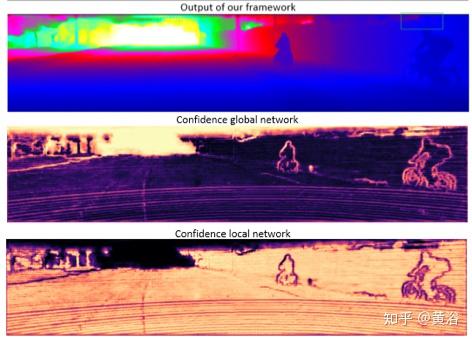
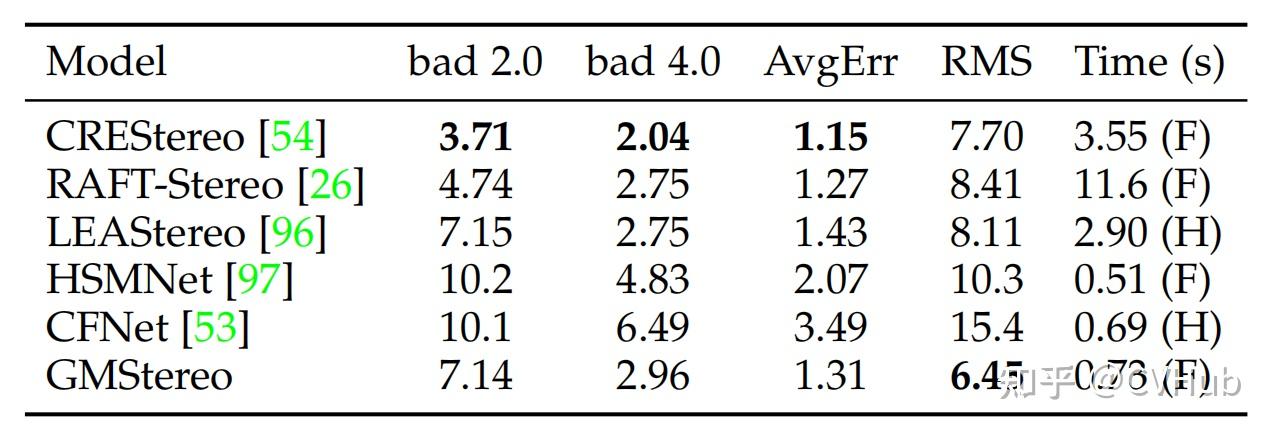
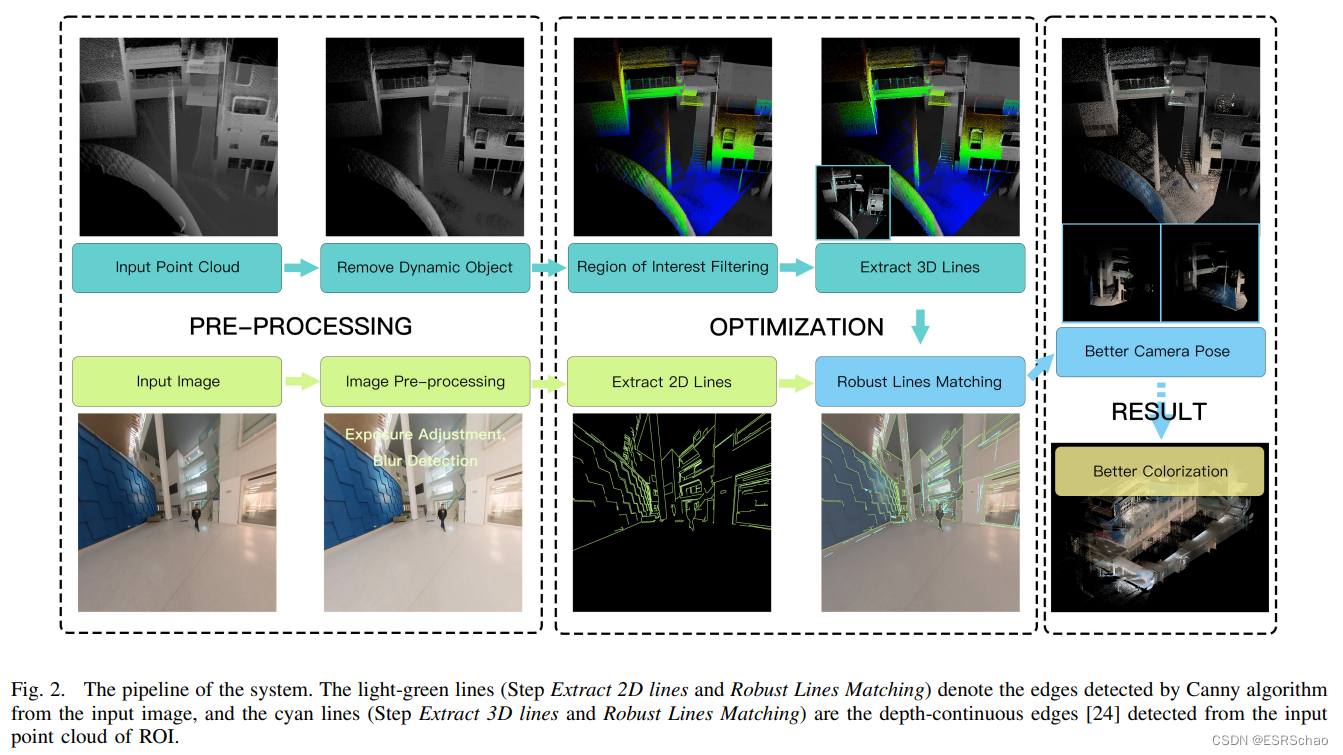
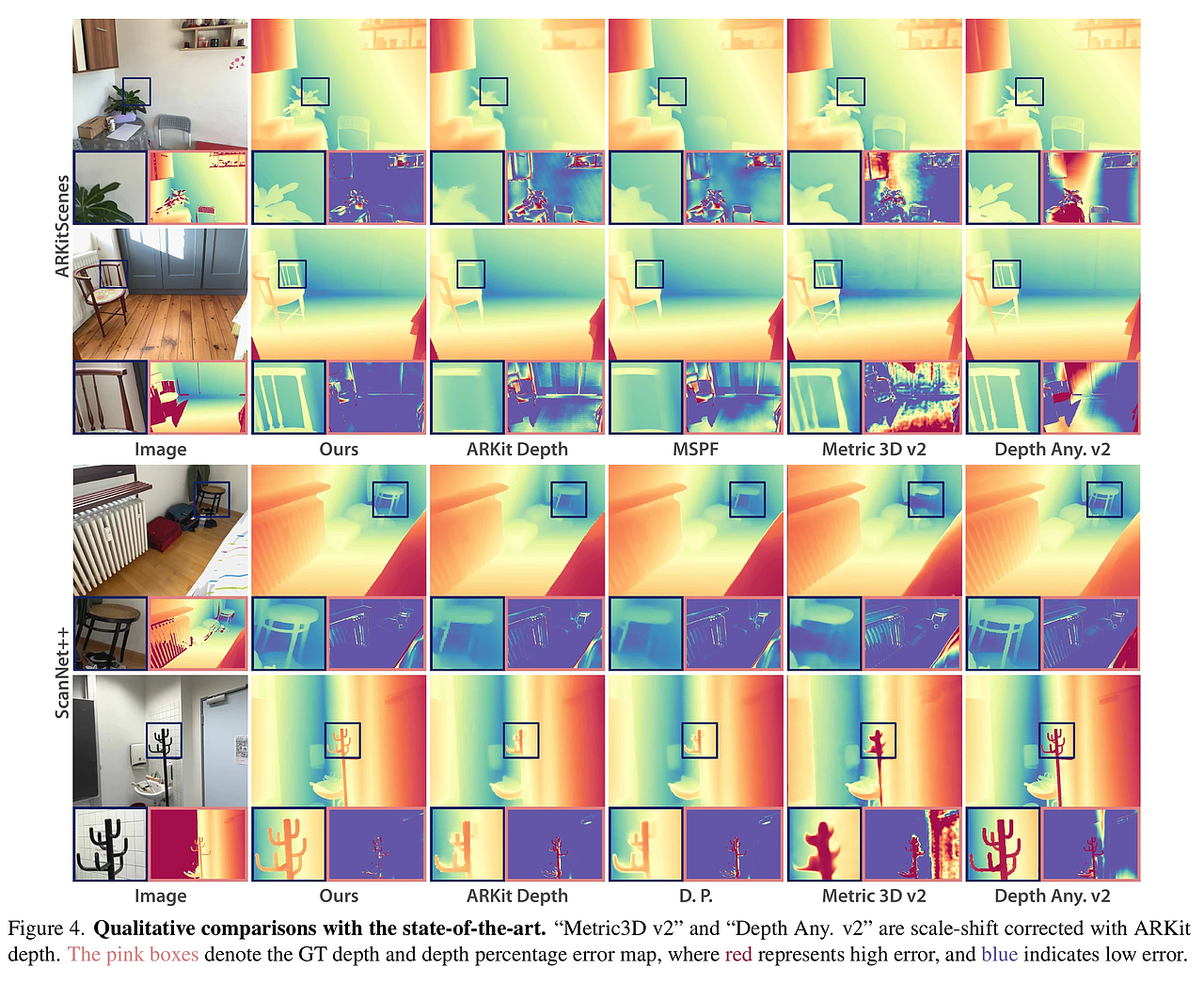
Based on this image's title: “论文复现:通过融合 LiDAR 和 Stereo 进行稳健且准确的深度估计 - sorodo”