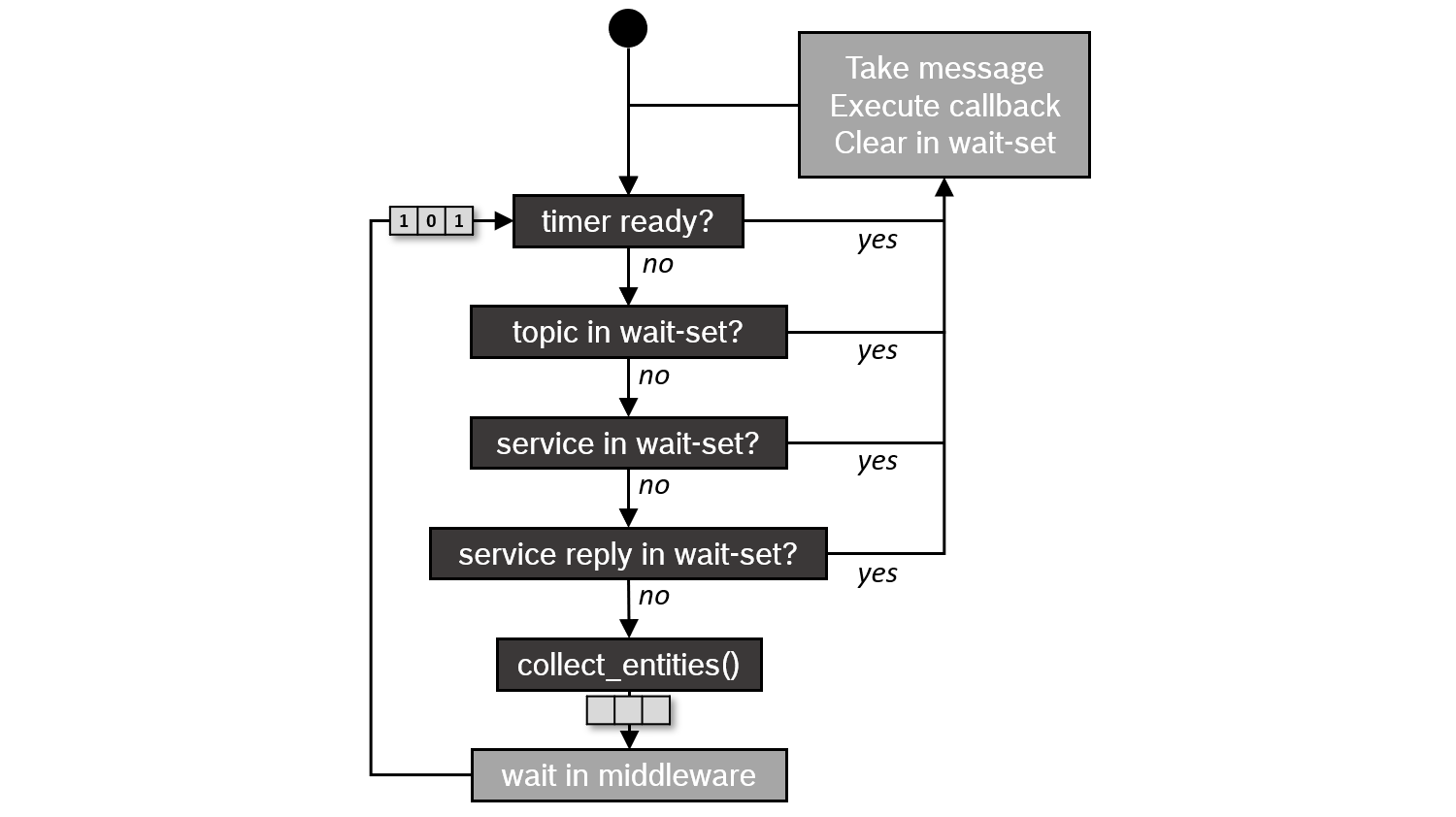
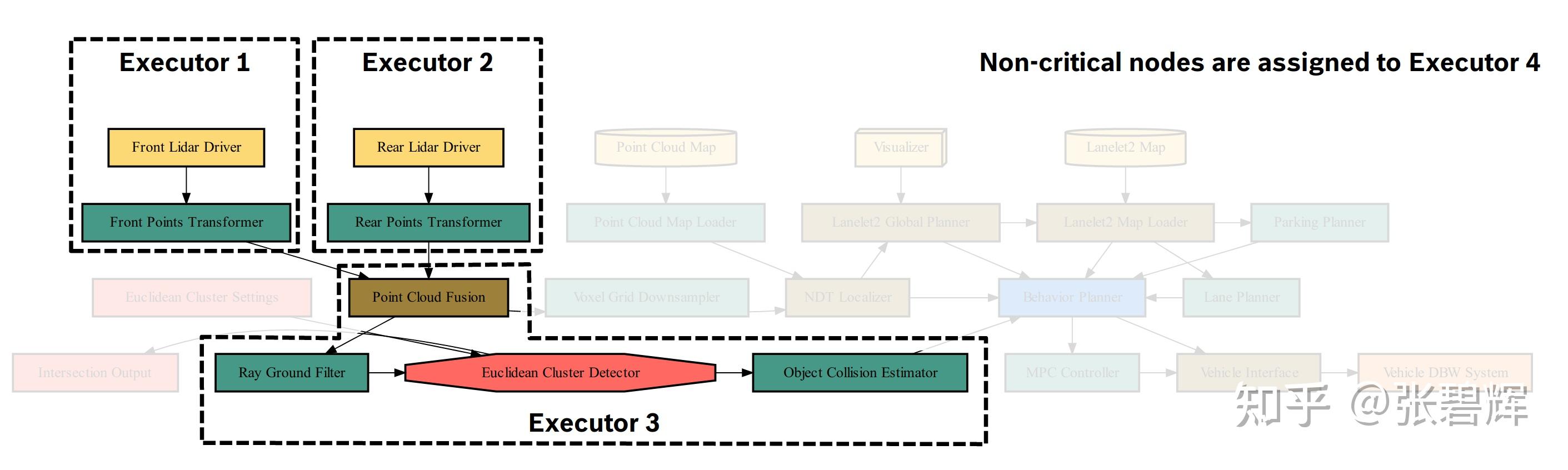
Executors — ROS 2 Documentation: Rolling documentation
Understanding actions — ROS 2 Documentation: Rolling documentation
Internal ROS 2 interfaces — ROS 2 Documentation: Rolling documentation
Building a Custom RViz Panel — ROS 2 Documentation: Rolling documentation
RViz User Guide — ROS 2 Documentation: Rolling documentation
Understanding nodes — ROS 2 Documentation: Rolling documentation
Building a Custom RViz Display — ROS 2 Documentation: Rolling documentation
Contributing to ROS 2 Documentation — ROS 2 Documentation: Rolling ...
Executors — ROS 2 Documentation: Humble documentation
Executors — ROS 2 Documentation: Kilted documentation
Humble Hawksbill (humble) — ROS 2 Documentation: Rolling documentation
Windows (binary) — ROS 2 Documentation: Rolling documentation
Marker: Display types — ROS 2 Documentation: Rolling documentation
Understanding topics — ROS 2 Documentation: Rolling documentation
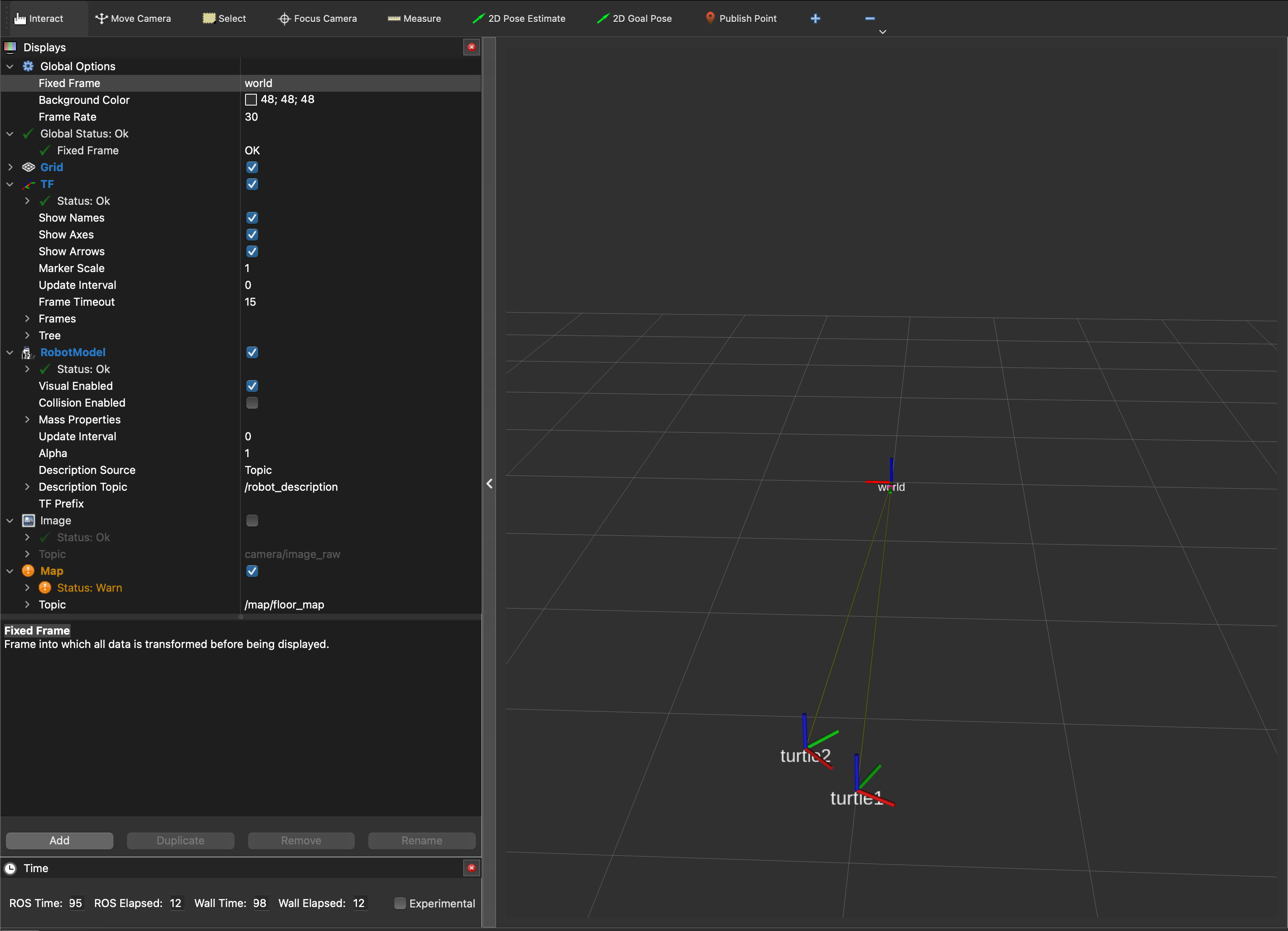
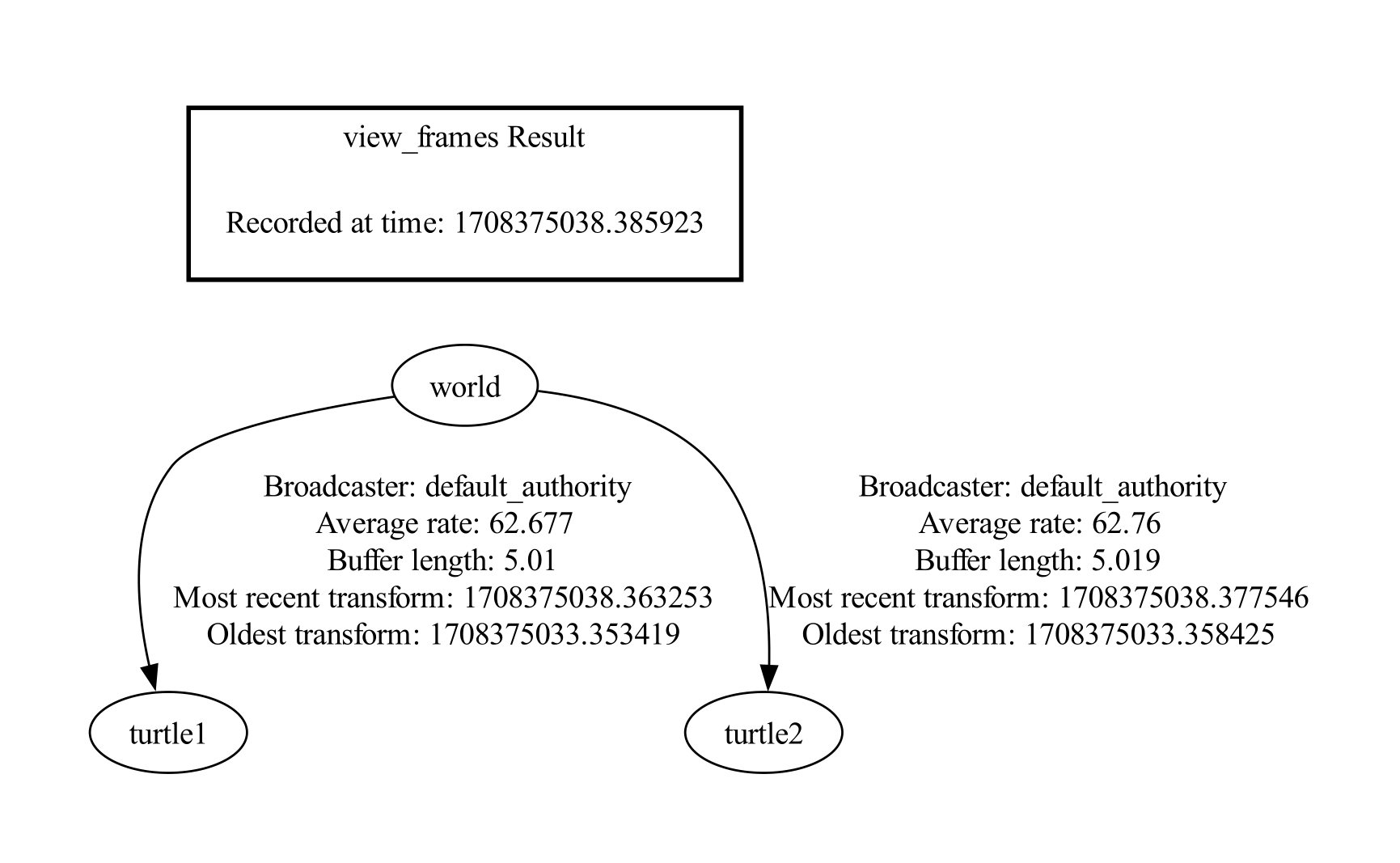
Introducing tf2 — ROS 2 Documentation: Rolling documentation
Rolling Ridley (rolling) — ROS 2 Documentation: Jazzy documentation
Creating a launch file — ROS 2 Documentation: Rolling documentation
Managing large projects — ROS 2 Documentation: Rolling documentation
Using rqt_console to view logs — ROS 2 Documentation: Rolling documentation
Understanding services — ROS 2 Documentation: Rolling documentation
Visualizing ROS 2 data with Foxglove — ROS 2 Documentation: Rolling ...
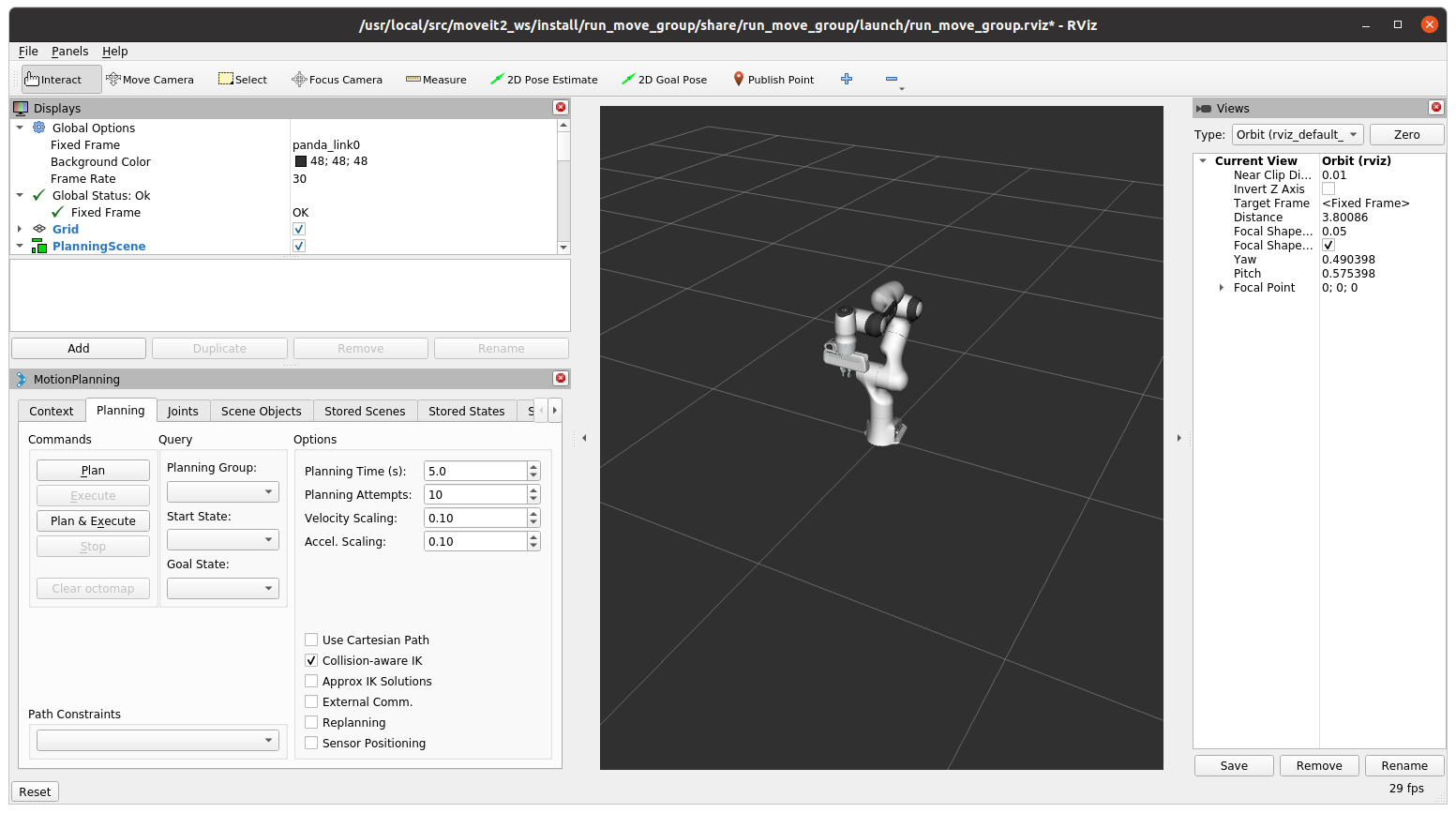
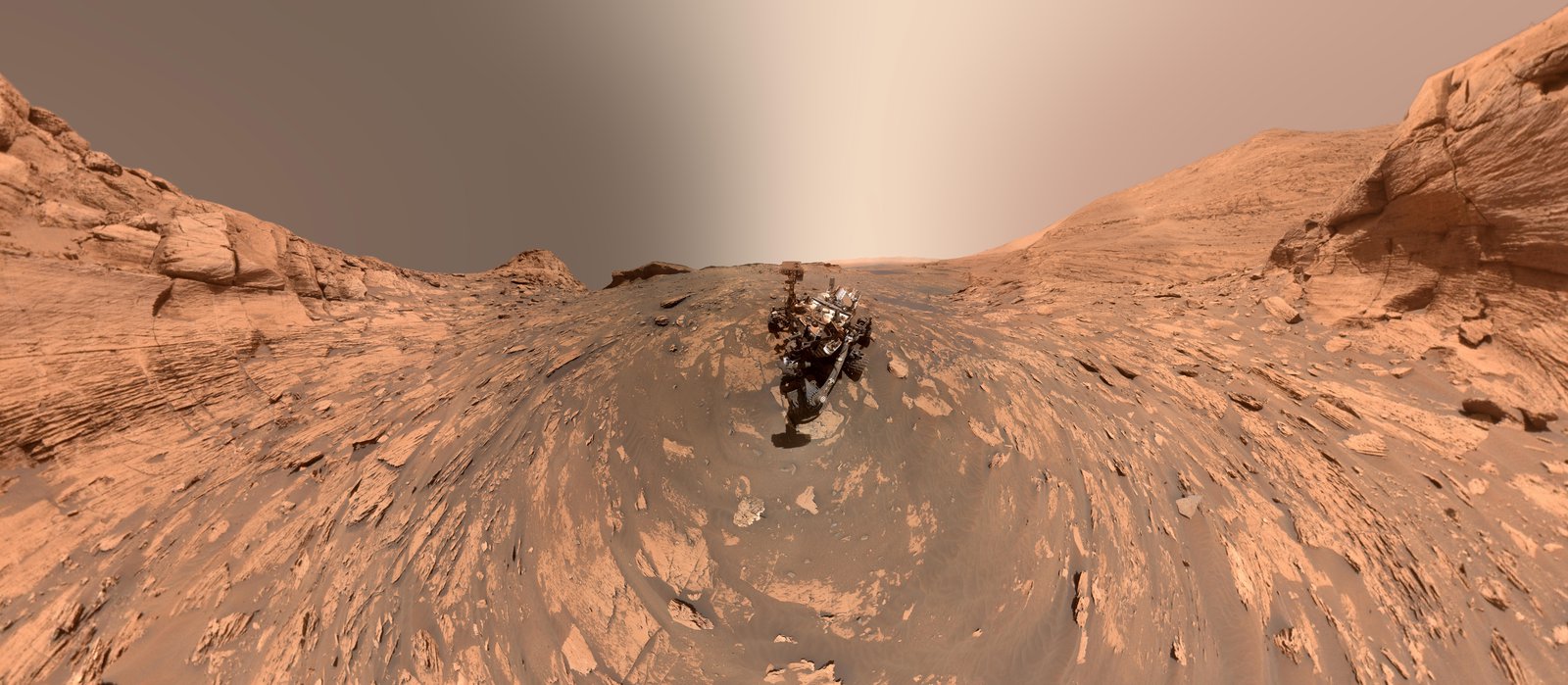
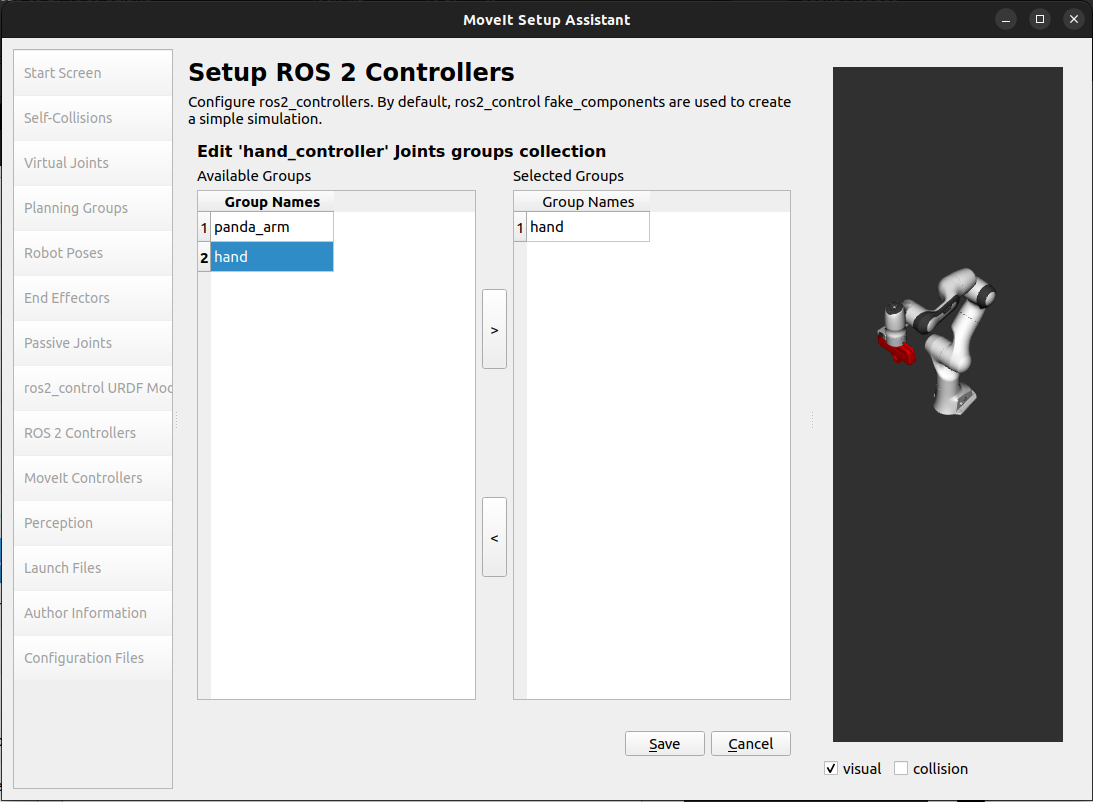
Moveit2 Image — Space ROS Documentation: Rolling documentation
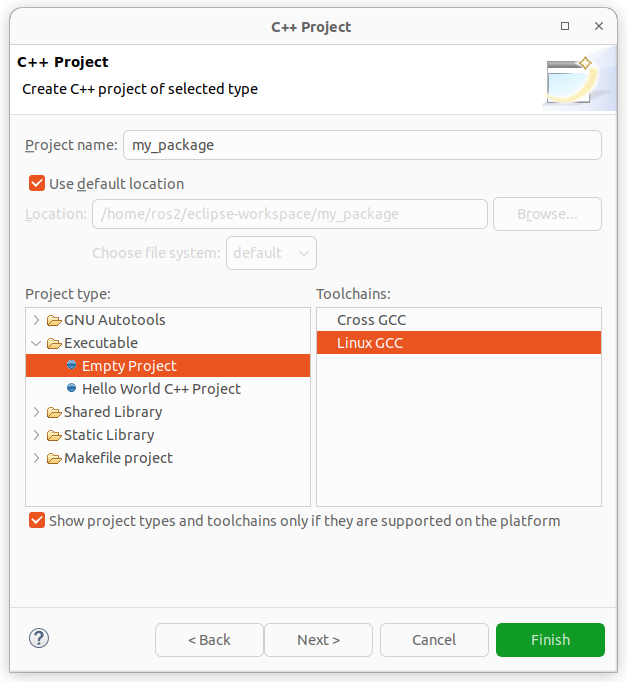
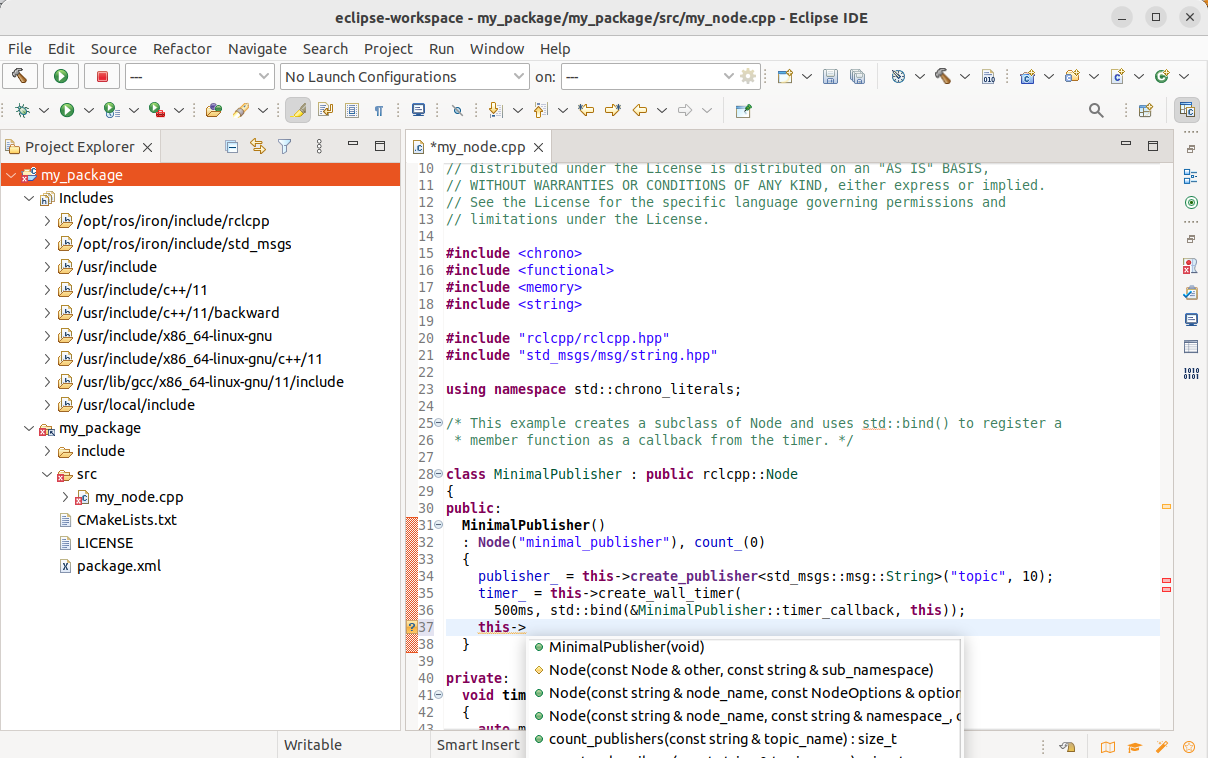
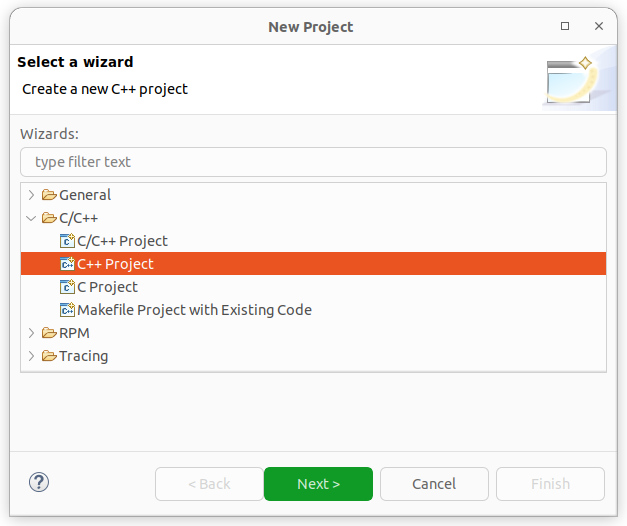
Building a package with Eclipse 2021-06 — ROS 2 Documentation: Rolling ...
Installation — ROS 2 Documentation: Iron documentation
Setting up a robot simulation (Gazebo) — ROS 2 Documentation: Rolling ...
About Space ROS — Space ROS Documentation: Rolling documentation
Setting up a robot simulation (Basic) — ROS 2 Documentation: Rolling ...
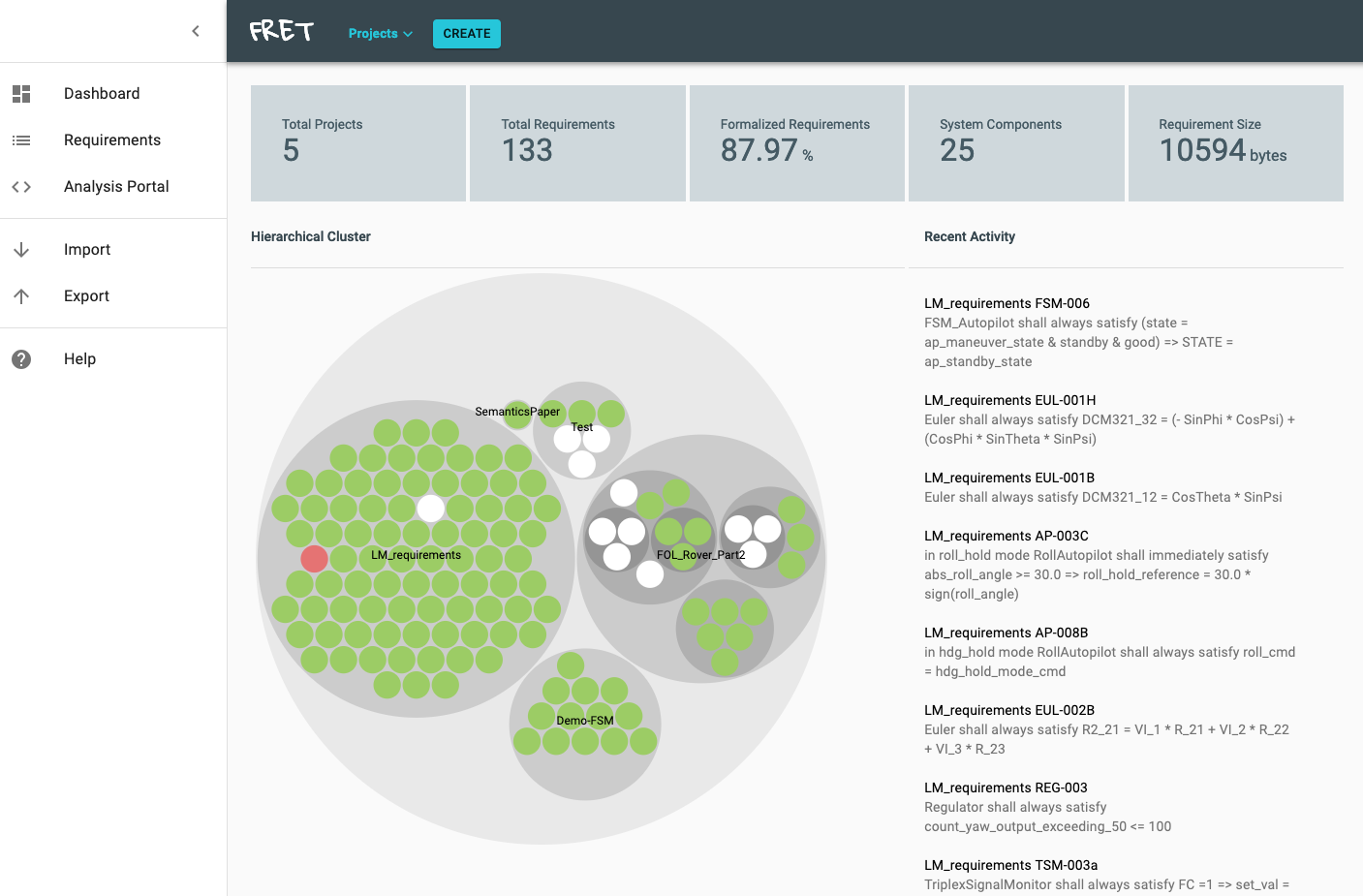
FRET — Space ROS Documentation: Rolling documentation
Space ROS Documentation — Space ROS Documentation: Rolling documentation
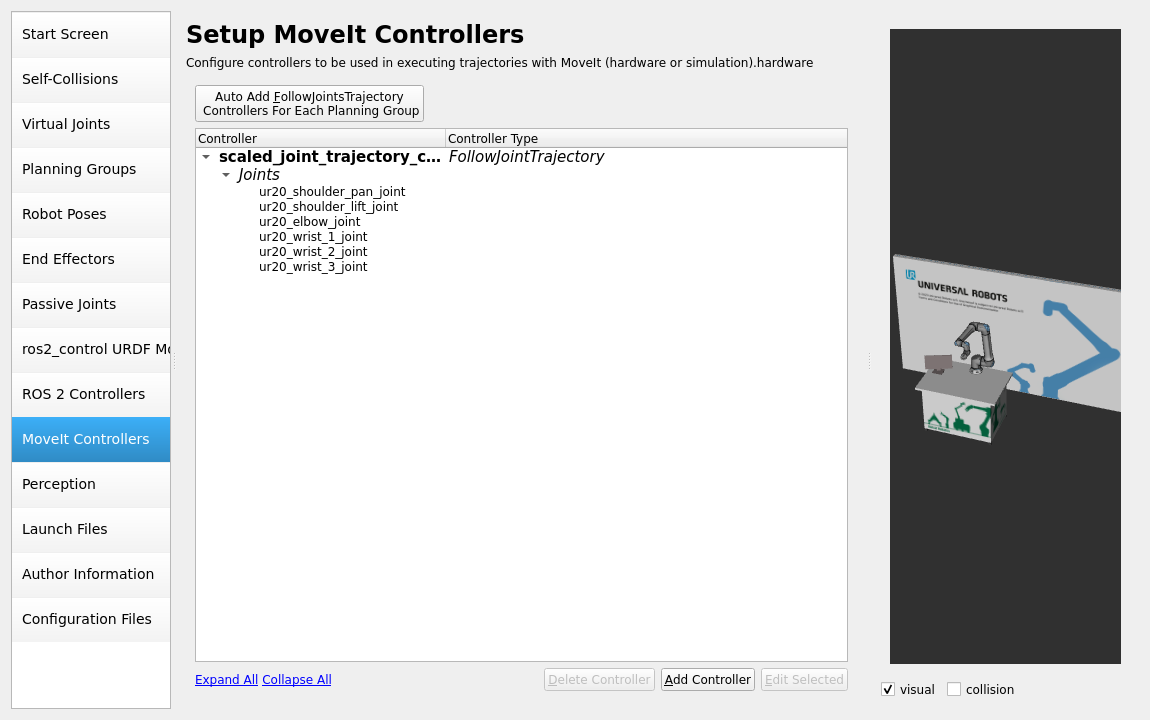
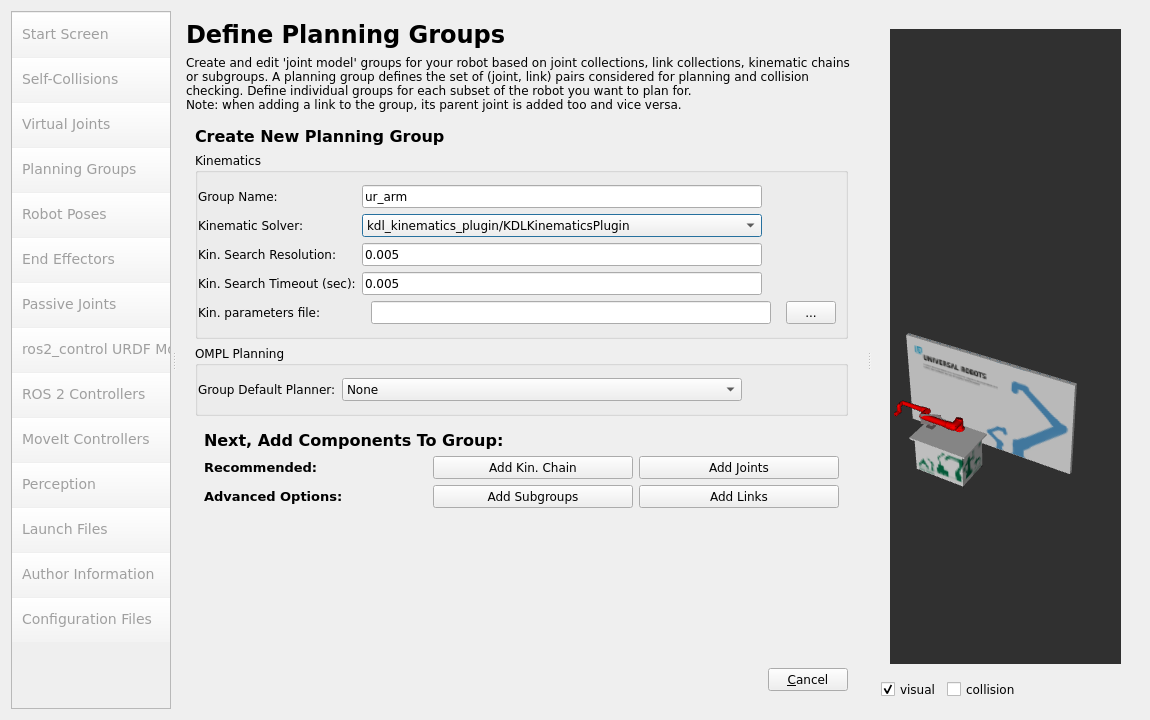
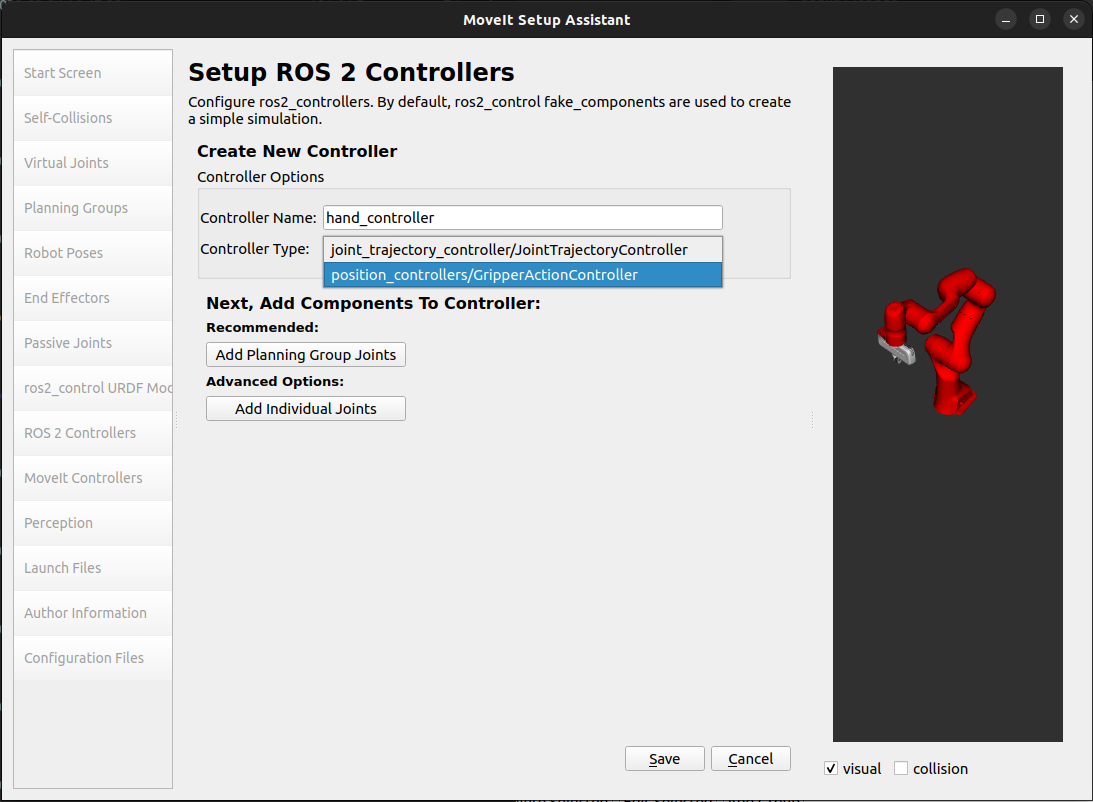
MoveIt Setup Assistant — MoveIt Documentation: Rolling documentation
Topic Keys Subscription Filtering Tutorial — ROS 2 Documentation ...
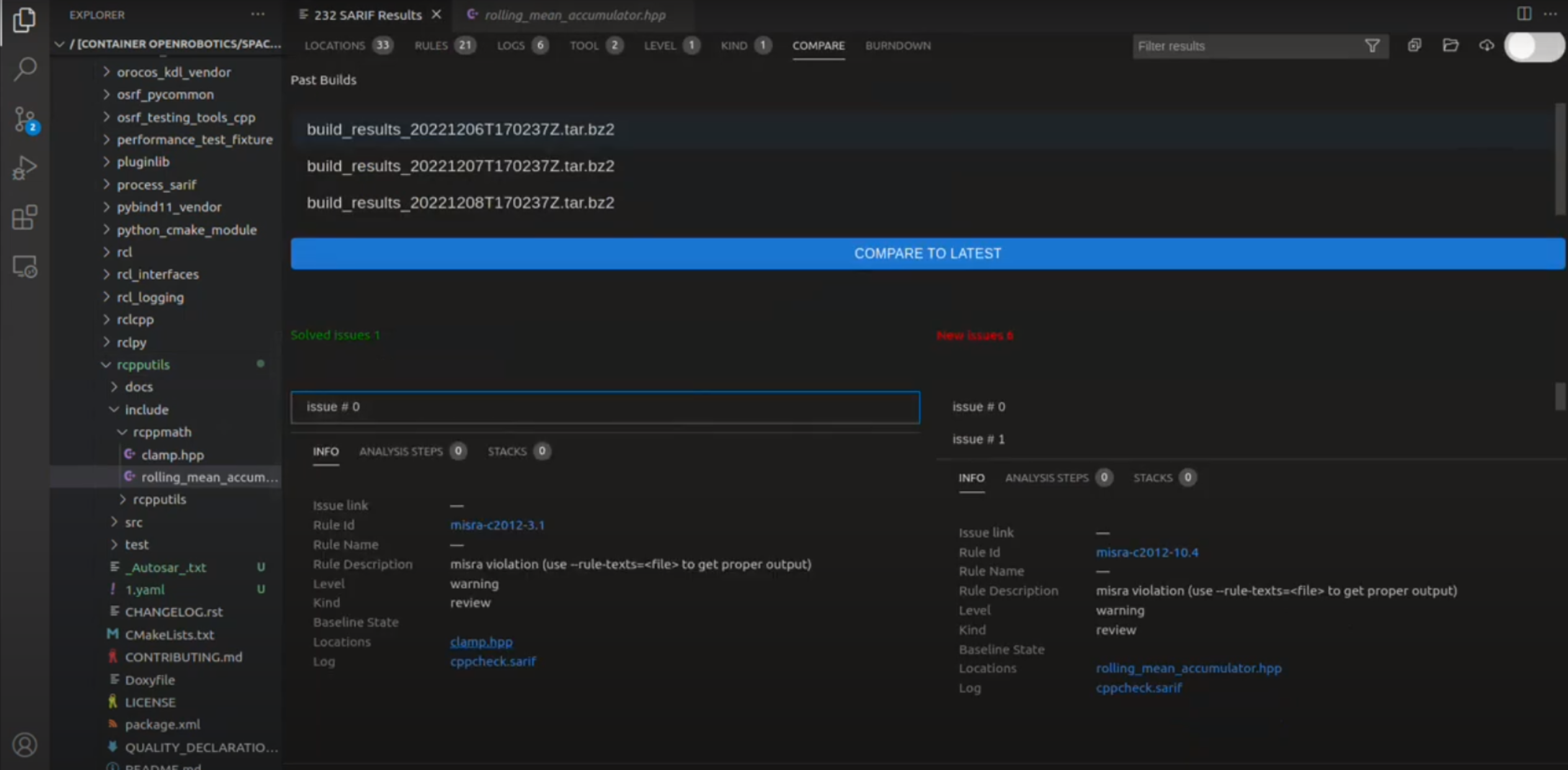
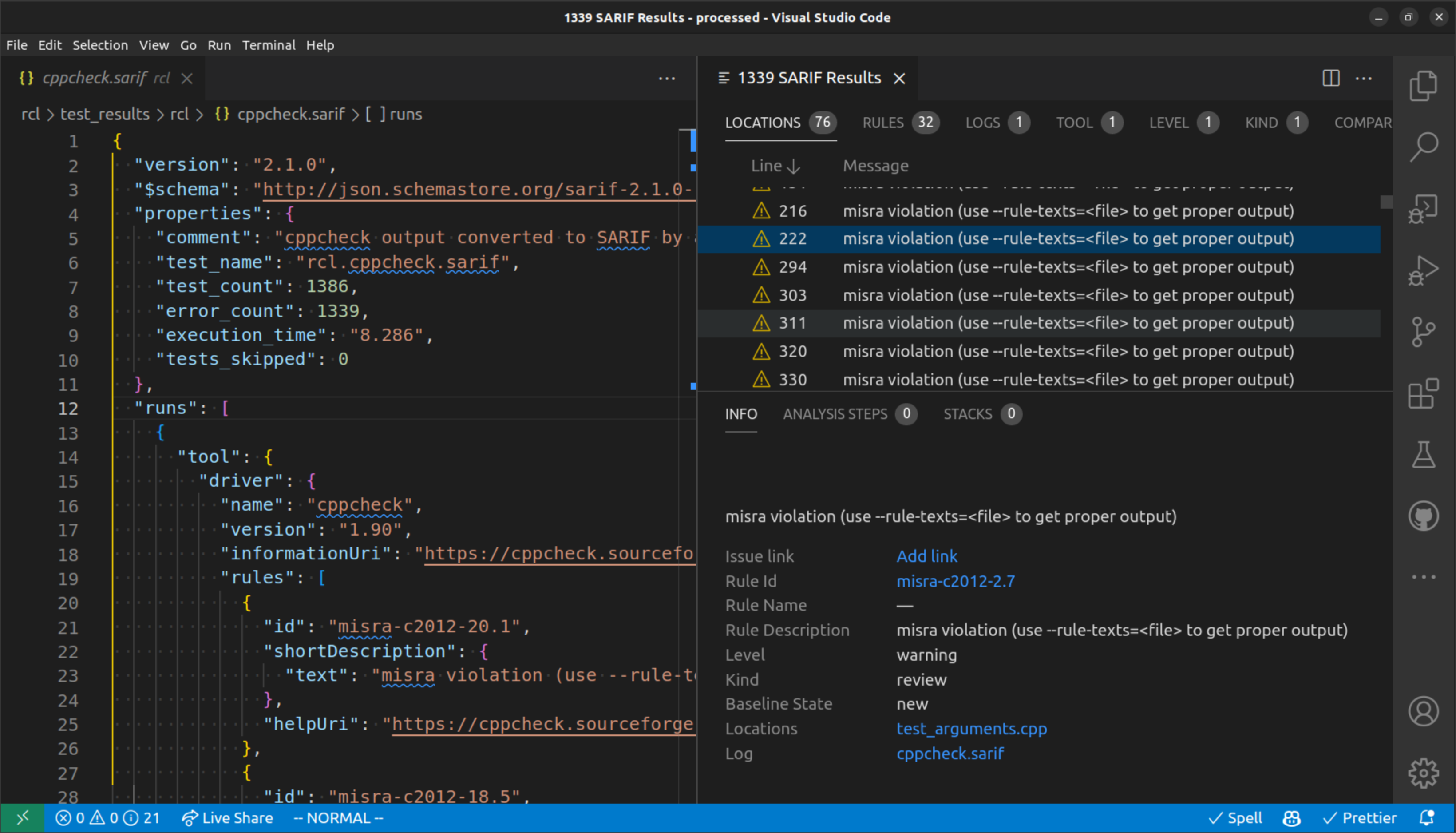
Using the Space ROS Dashboard — Space ROS Documentation: Rolling ...
Build the MoveIt! config — Universal Robots ROS 2 Driver Documentation ...
ROS 2 Service Load Balancing — service_load_balancing: Rolling 0.1.3 ...
Logging and logger configuration — ROS 2 Documentation: Kilted ...
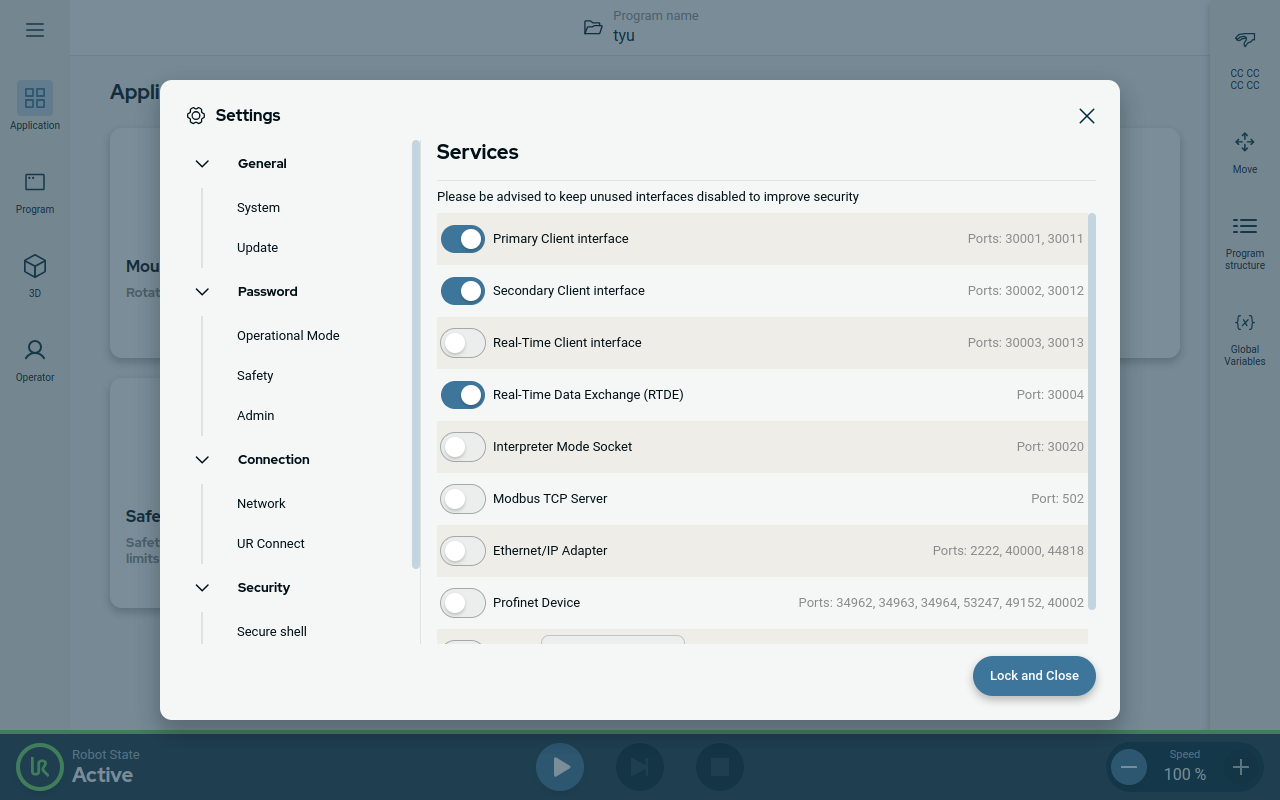
Robot setup — Universal Robots ROS 2 Driver Documentation 0.1 documentation
About internal ROS 2 interfaces — ROS 2 Documentation: Dashing ...
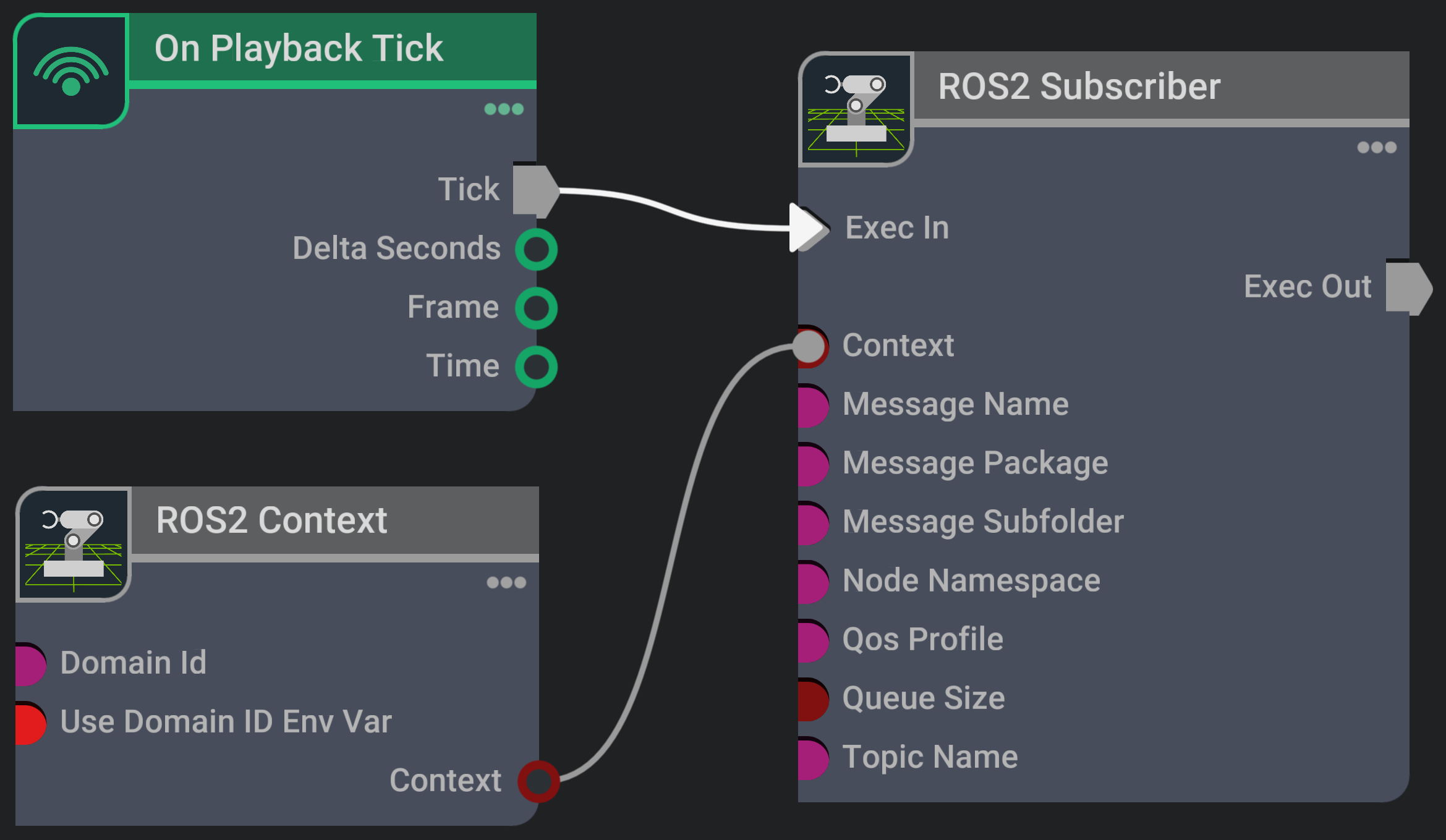
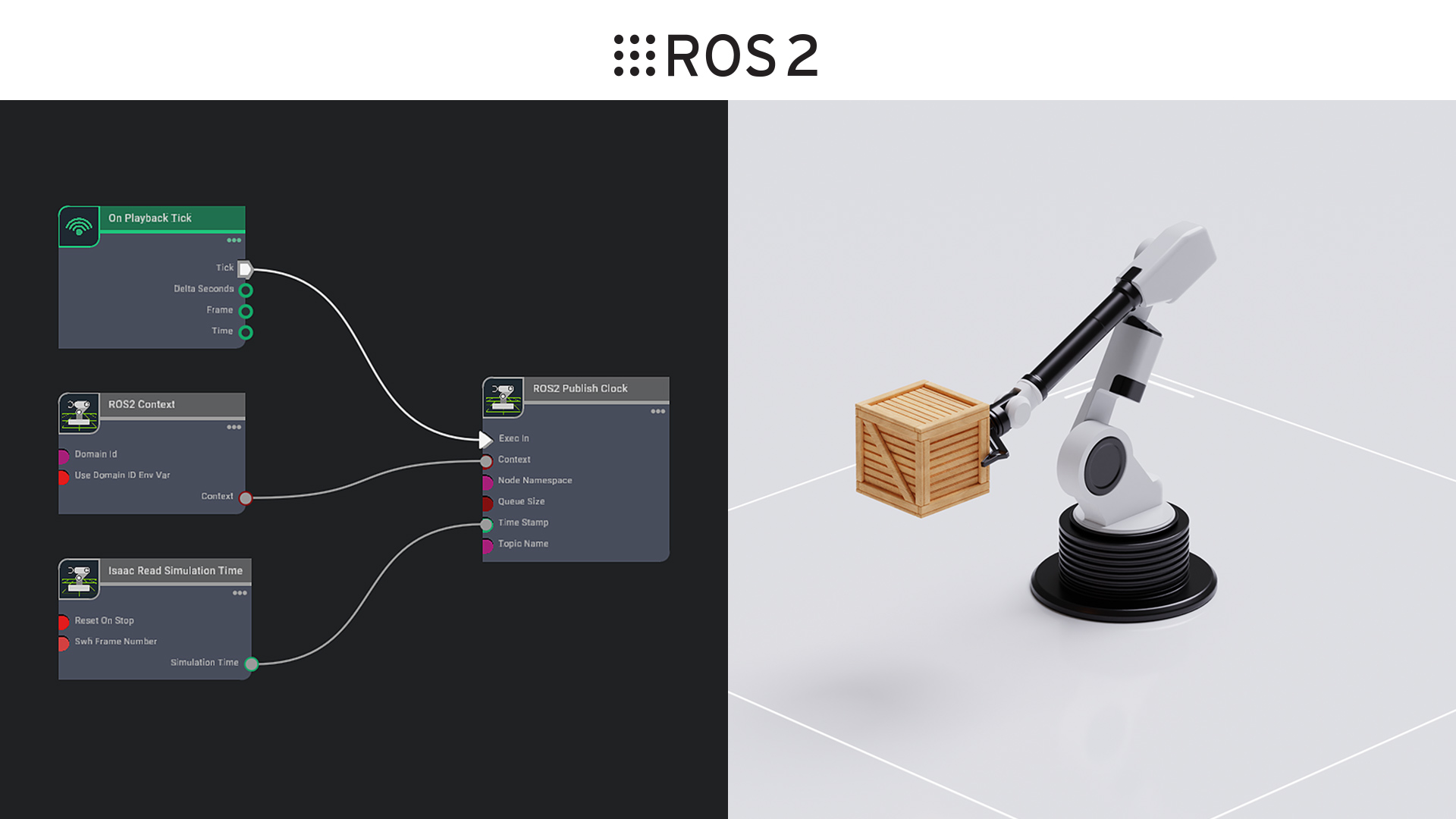
ROS 2 Generic Publisher and Subscriber — Isaac Sim Documentation
Setting up a robot simulation (Webots) — ROS 2 documentation documentation
Understanding Parameters - ROS 2 Documentation - Humble Documentation ...
How to use ros2_tracing to trace and analyze an application — ROS 2 ...
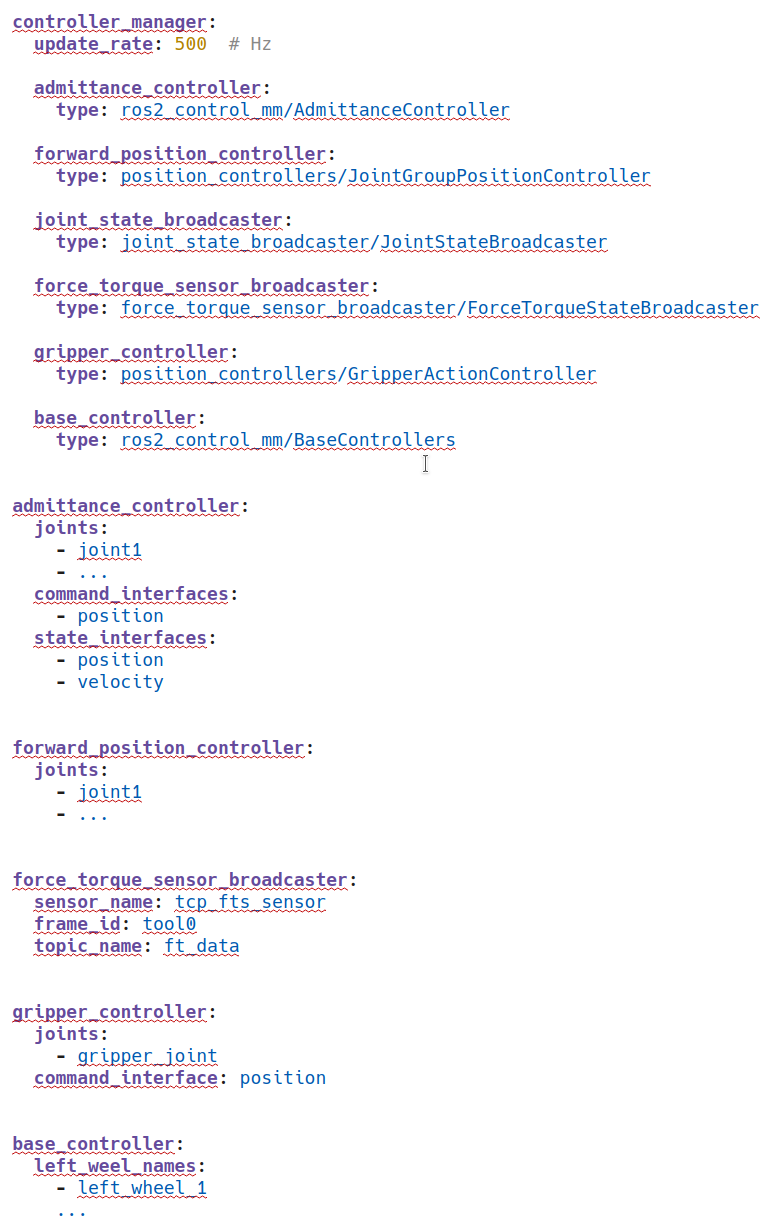
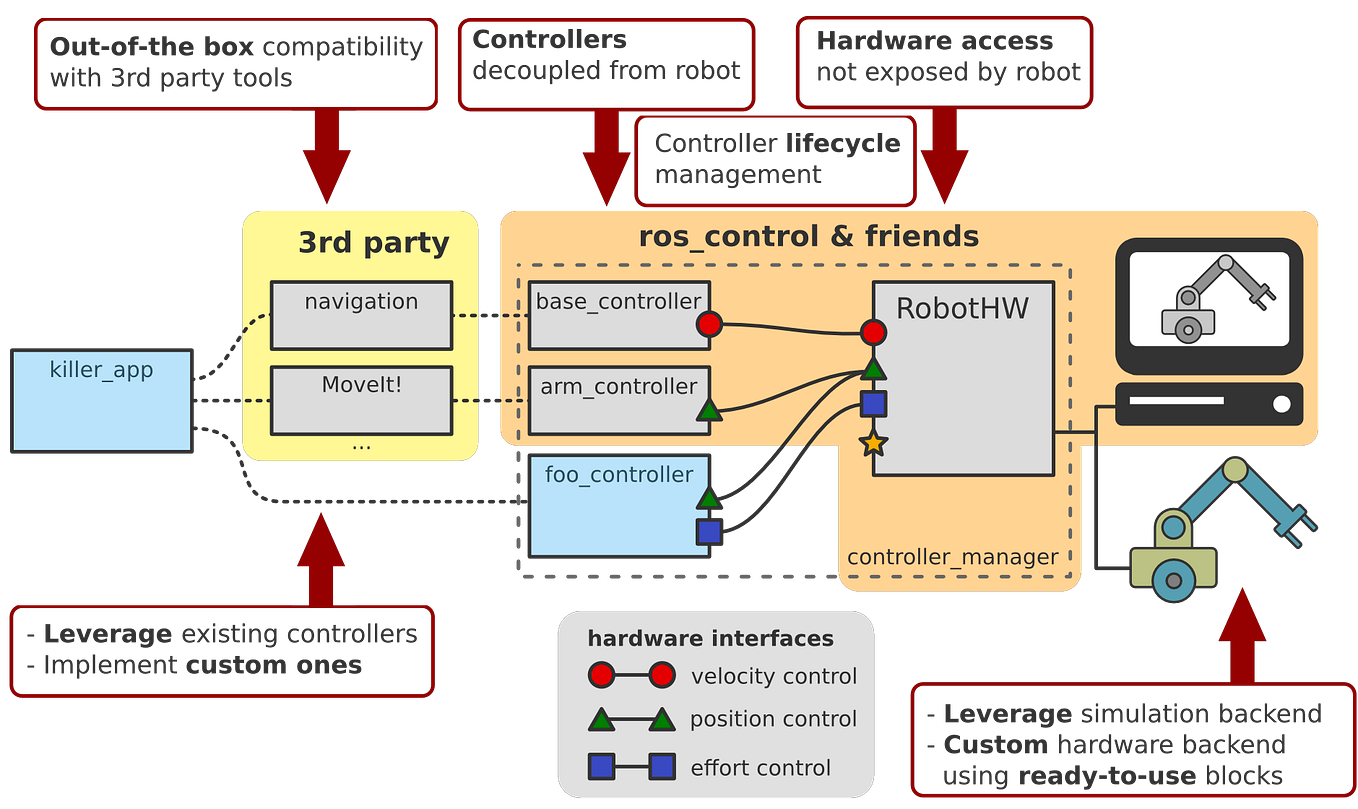
Controller Manager — ROS2_Control: Rolling Apr 2026 documentation
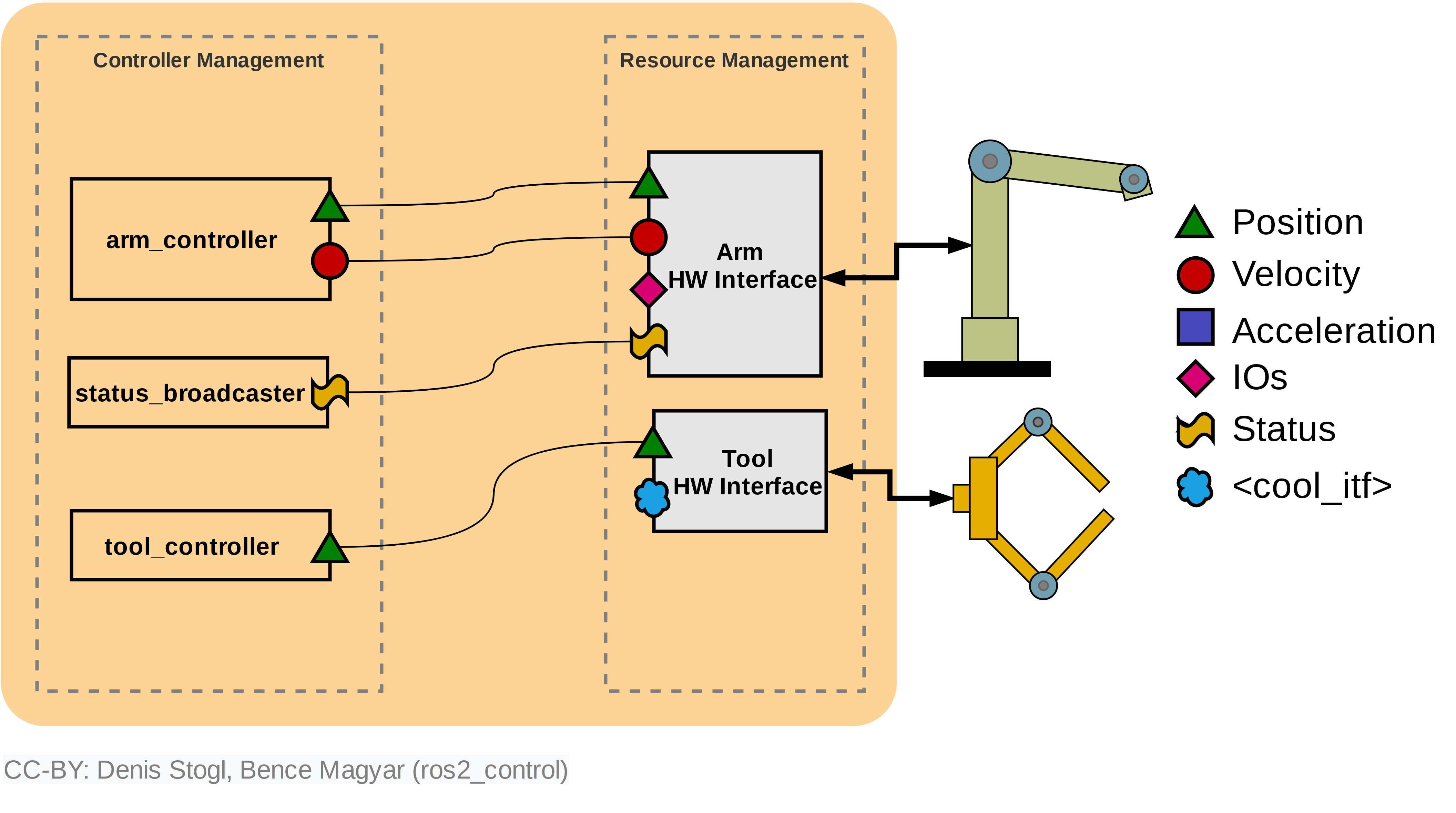
Resources — ROS2_Control: Rolling Apr 2026 documentation
Update Default ROS 2 Distro on ROS Documentation Site - ROS Ideas ...
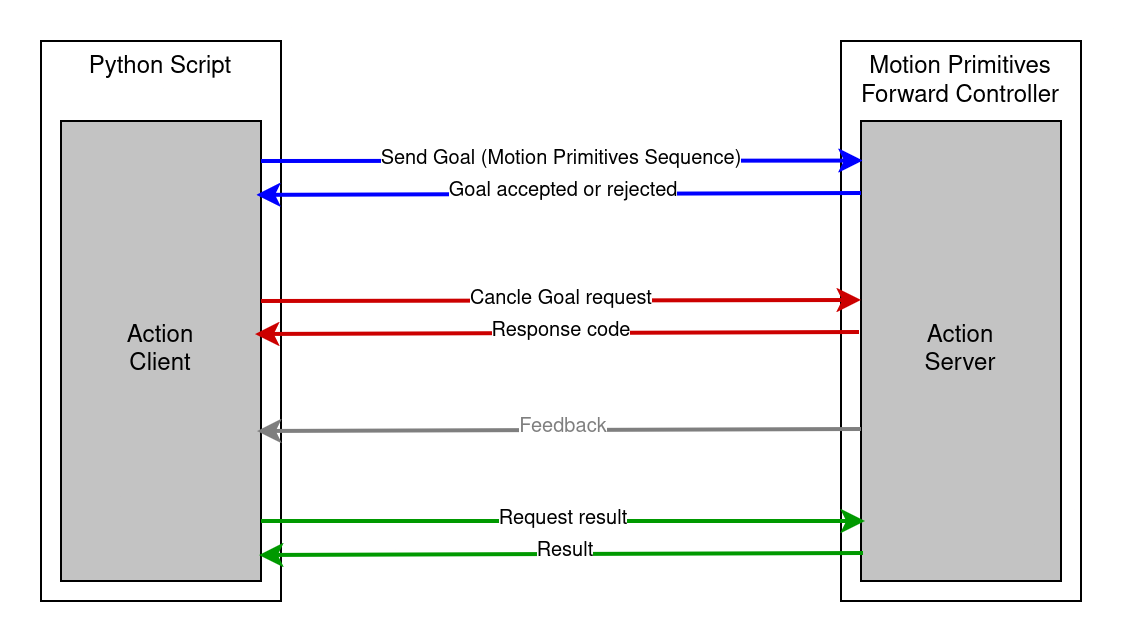
motion_primitive_controllers — ROS2_Control: Rolling May 2026 documentation
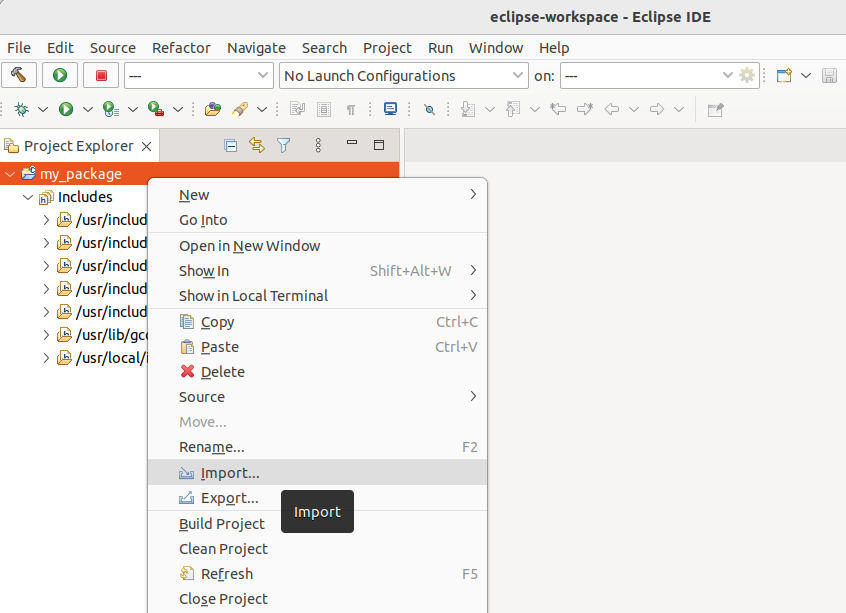
Using Eclipse Oxygen with rviz2 [community-contributed] — ROS 2 ...
📝 New Issue Template Added for ROS 2 Documentation - ROS General - Open ...
New Packages for ROS 2 Rolling Ridley 2026-01-21 - ROS Announcements ...
Command Line Tools — tf2_ros: Rolling 0.45.6 documentation
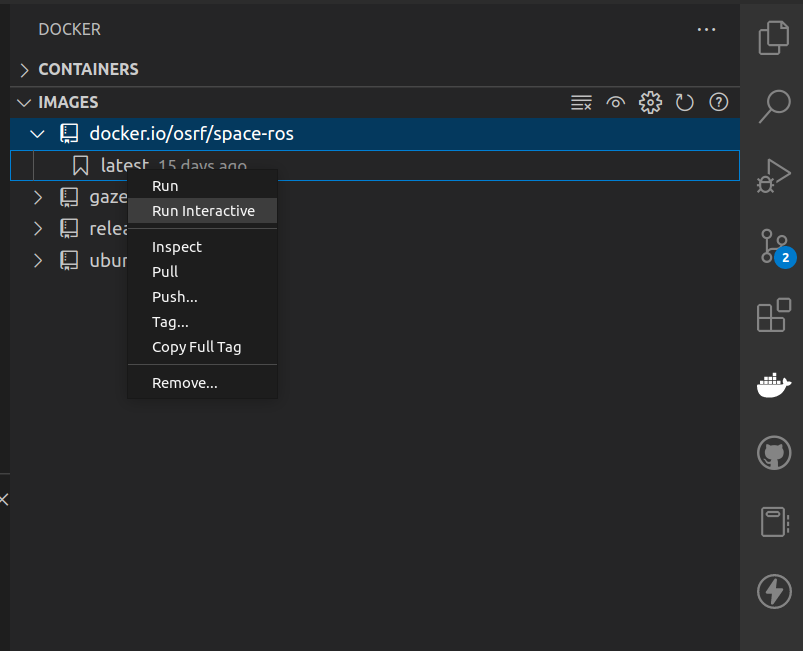
Using VSCode with the Space ROS Docker Images — Space ROS Documentation ...
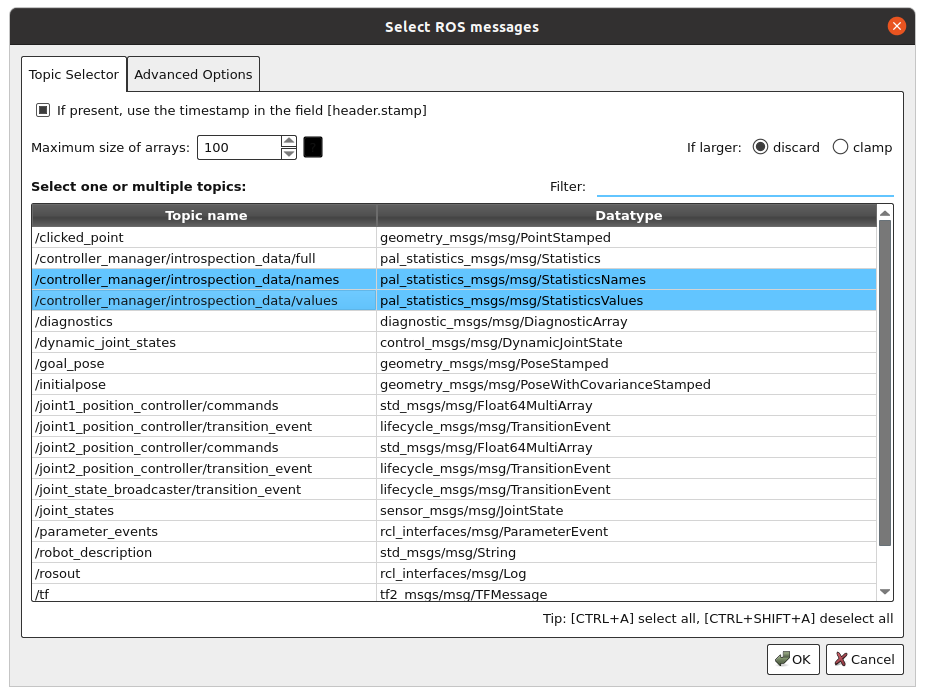
Introspection of the ros2_control setup — ROS2_Control: Rolling Feb ...
Figure 3 from Experimental Evaluation of Callback Behavior in ROS 2 ...
Example 7: Full tutorial with a 6DOF robot — ROS2_Control: Rolling Feb ...
A Beginner’s Guide to Simulating and Testing Robots with ROS 2 and ...
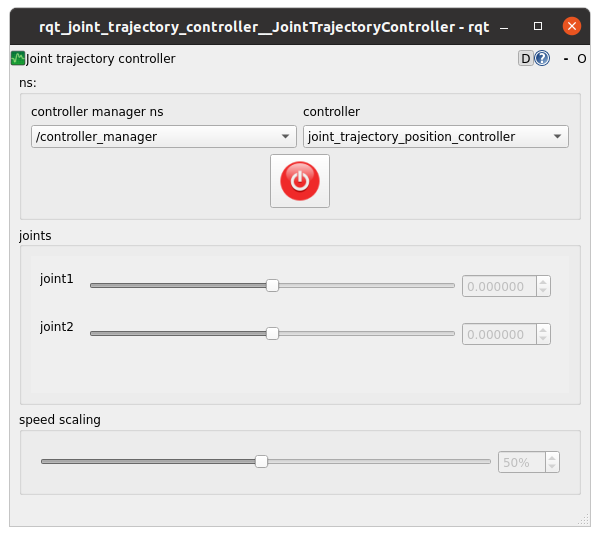
rqt_joint_trajectory_controller — ROS2_Control: Rolling May 2026 ...
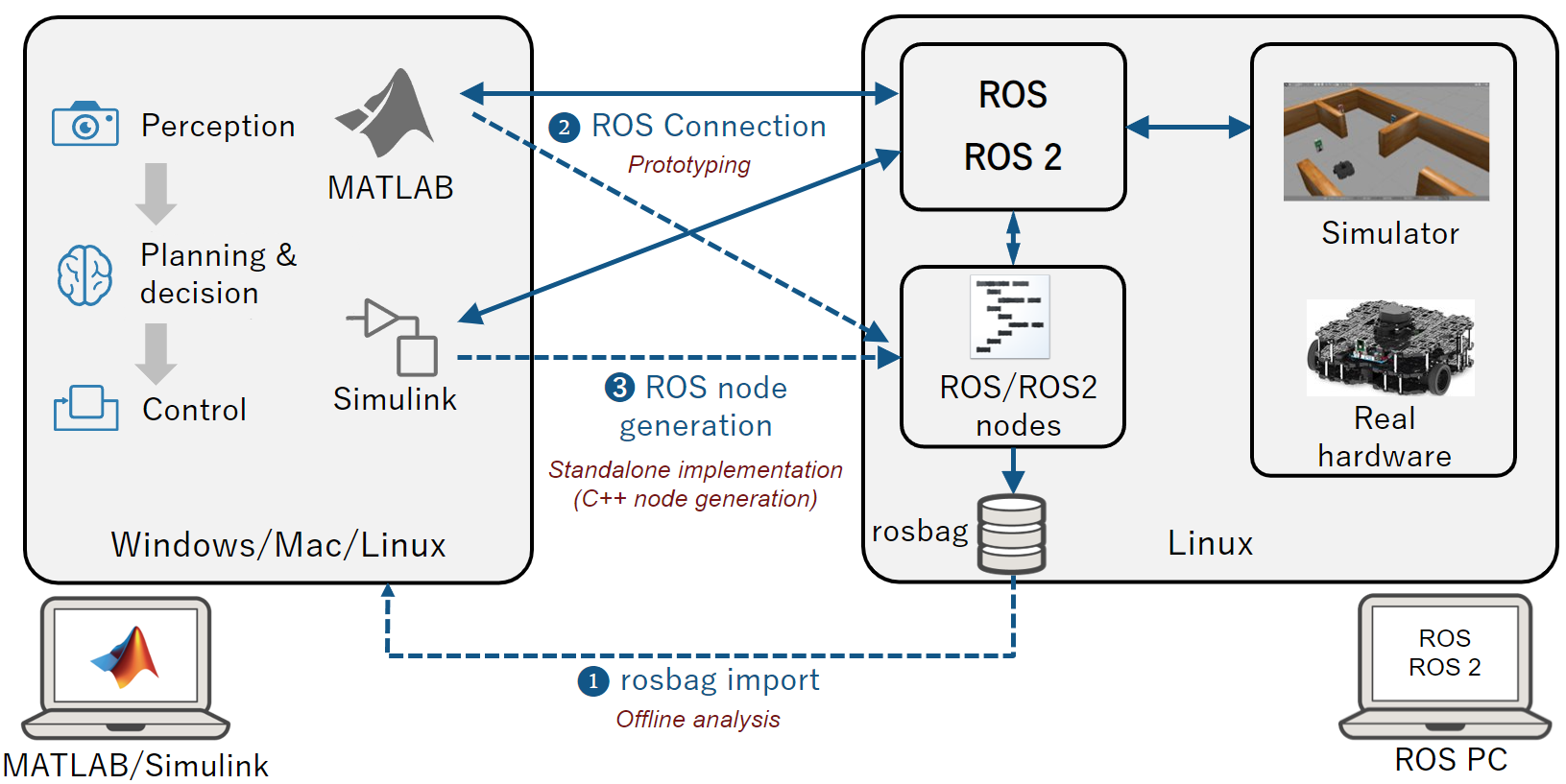
ROS Toolbox Documentation
Example 9: Simulation with RRBot — ROS2_Control: Rolling May 2026 ...
Big news for ROS 2 Python users A new executor is on its way! It's ...
ros2_documentation/conf.py at rolling · ros2/ros2_documentation · GitHub
How to easily contribute to ROS2 documentation - The Construct
examples_ros2/launch_testing at rolling · KnowNo/examples_ros2 · GitHub
ROS2 from the Ground Up: Part 5- Concurrency, Executors and Callback ...
¿Qué es ROS y ROS2? - R3PL1C4 en Español
ROS 2基础概念#5:执行器(Executor)| ROS 2学习笔记 - HY's Blog
Welcome to synapticon_ros2_control’s documentation! — synapticon_ros2 ...
ROS
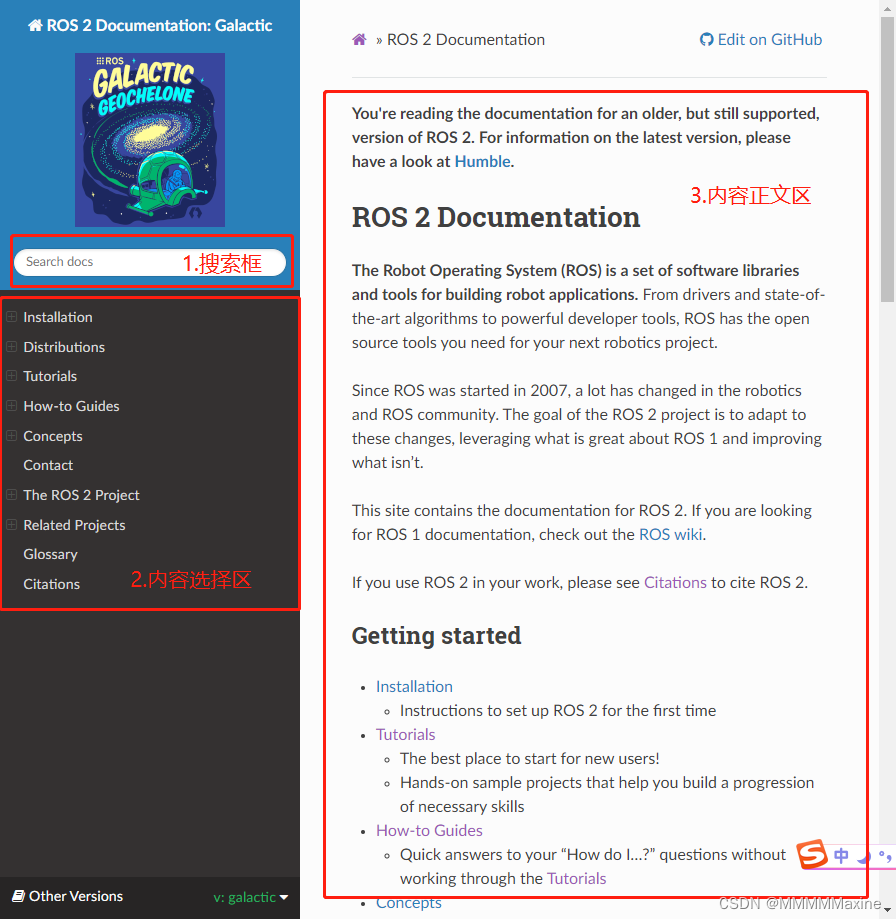
ROS2 Documentation使用指南(自用)_ros2 wiki-CSDN博客
Dependency Management | ros2/ros2_documentation | DeepWiki
Ubuntu24.04安装ROS2_ubuntu24安装ros-CSDN博客
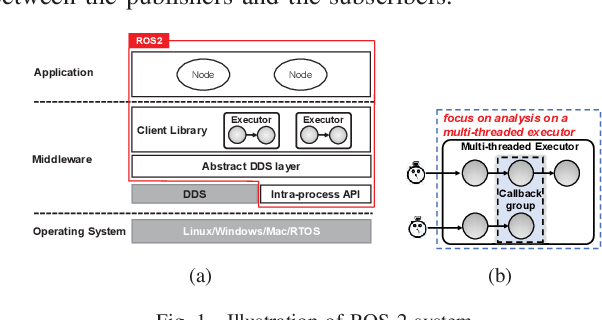
Figure 1 from Real-Time Scheduling and Analysis of Processing Chains on ...
meta-ros/meta-ros2-rolling/generated-recipes/control-msgs/control-msgs ...
Klepsydra ROS2 Multi Core Ring Buffer Executor User Guide
gz_ros2_control/gz_ros2_control_demos/launch/diff_drive_example.launch ...
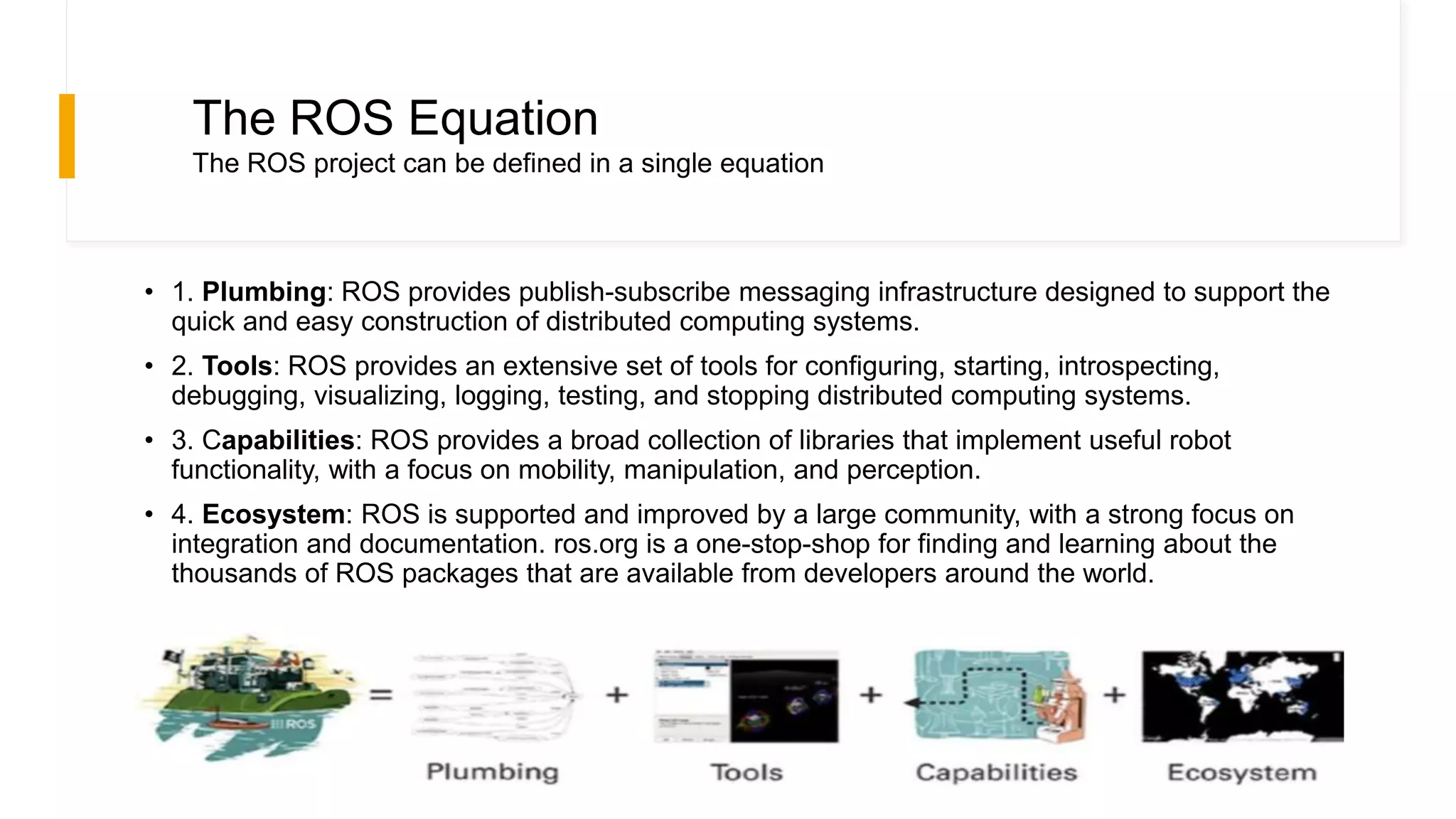
Robot operating system [ROS] | PPTX
20-ROS2初探 - 知乎
Based on this image's title: “Executors — ROS 2 Documentation: Rolling documentation”