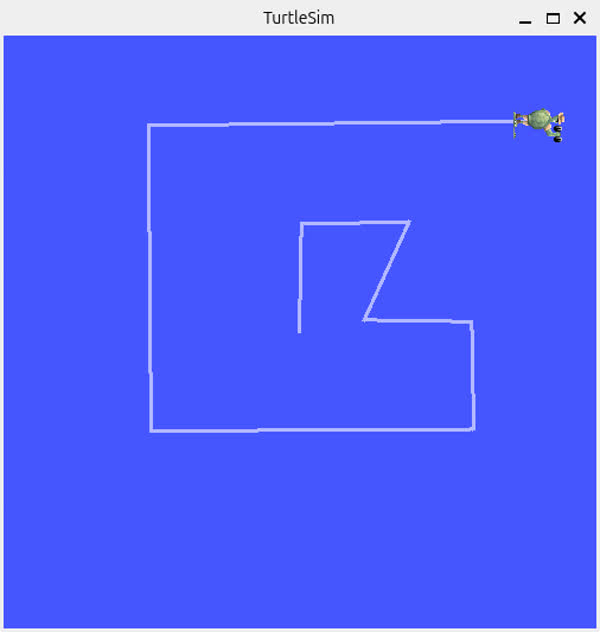
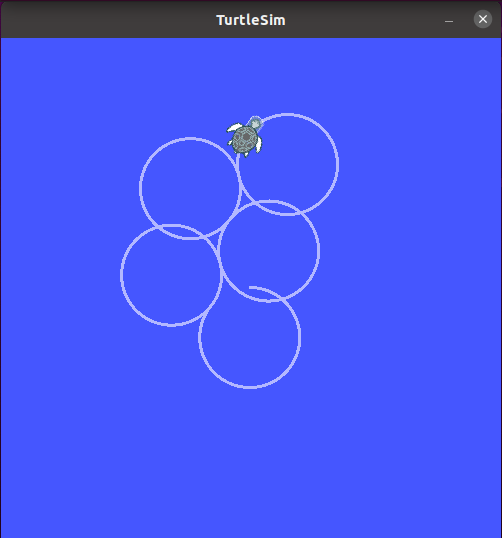
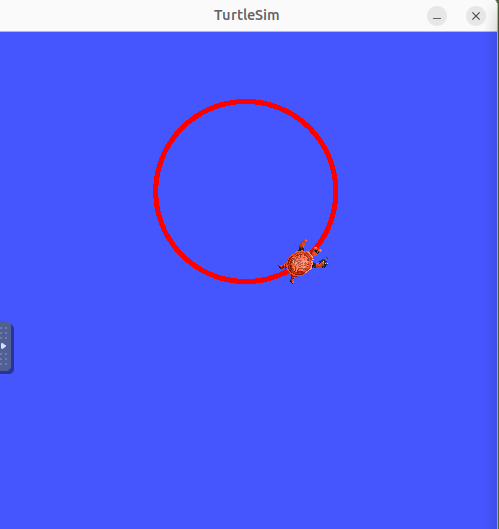
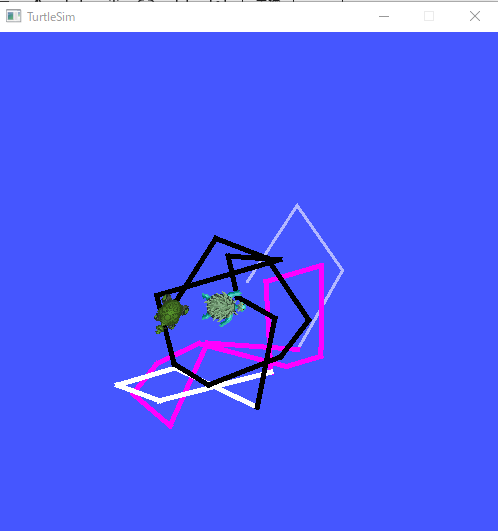
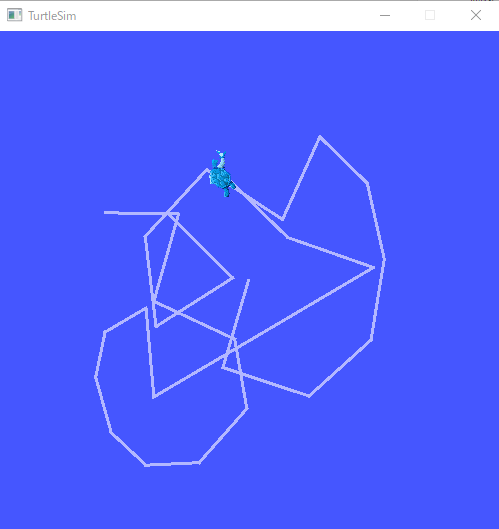
ROS 2 (Jazzy) + Pythonでturtlesimを制御する(円・螺旋・8の字運動)
Managing large projects — ROS 2 Documentation: Jazzy documentation
Mastering Turtlesim in ROS 2 Foxy Fitzroy
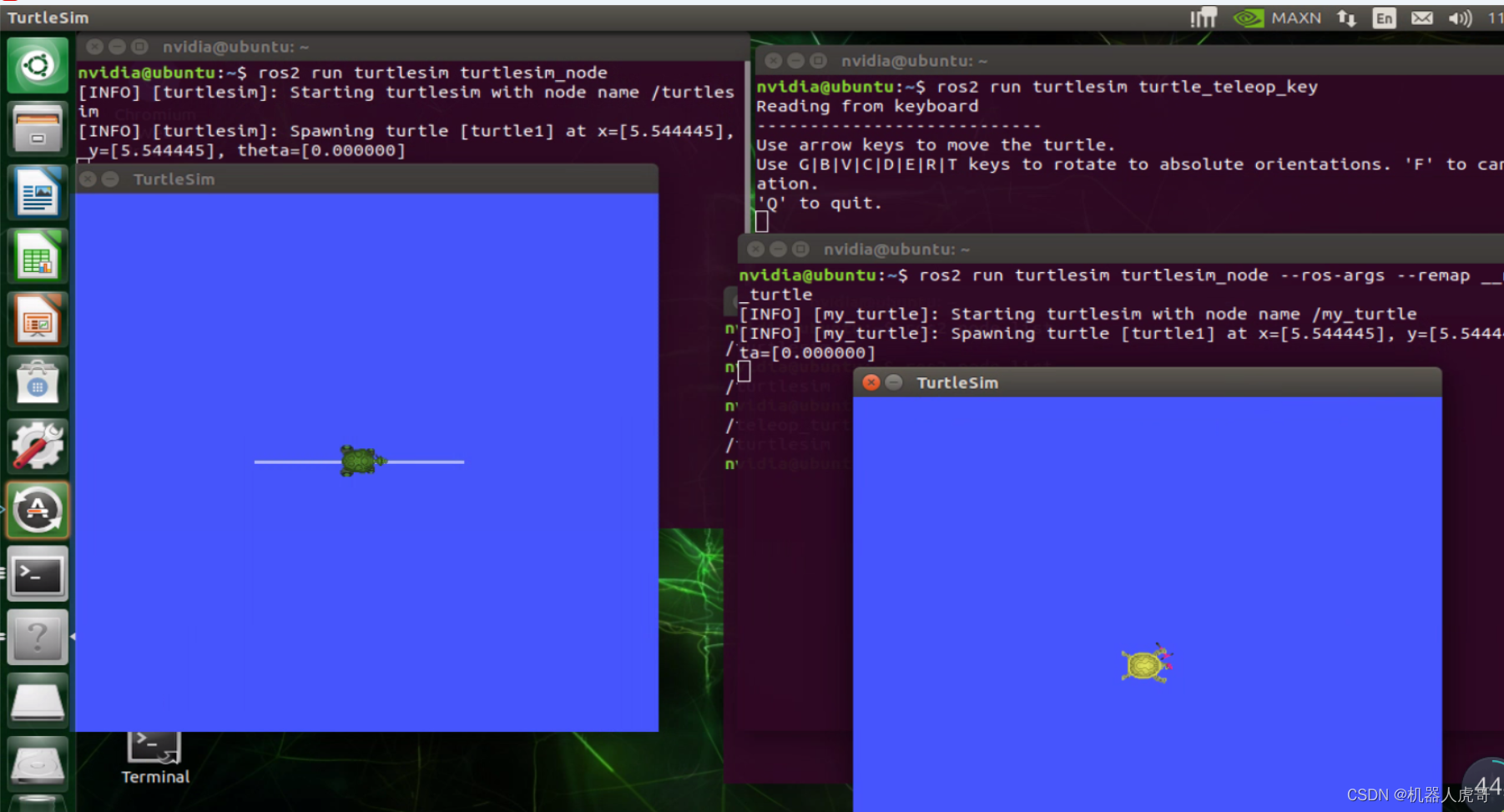
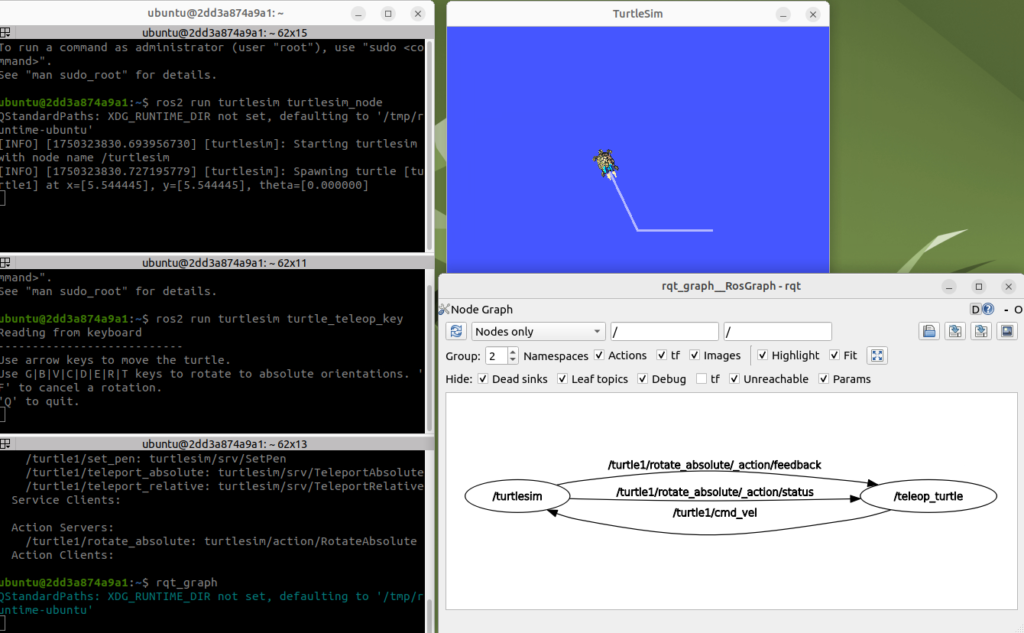
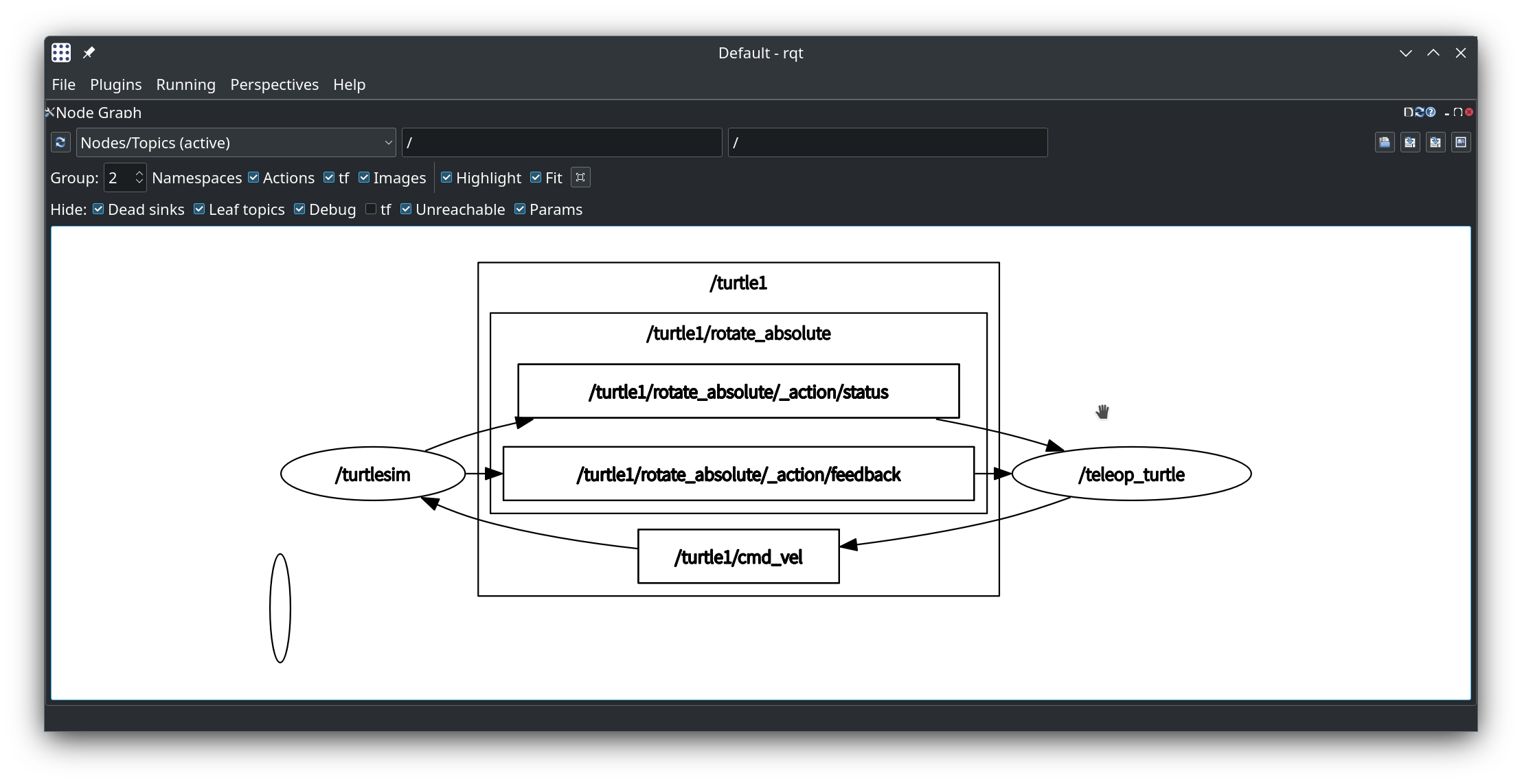
Using turtlesim, ros2, and rqt — ROS 2 Documentation: Jazzy documentation
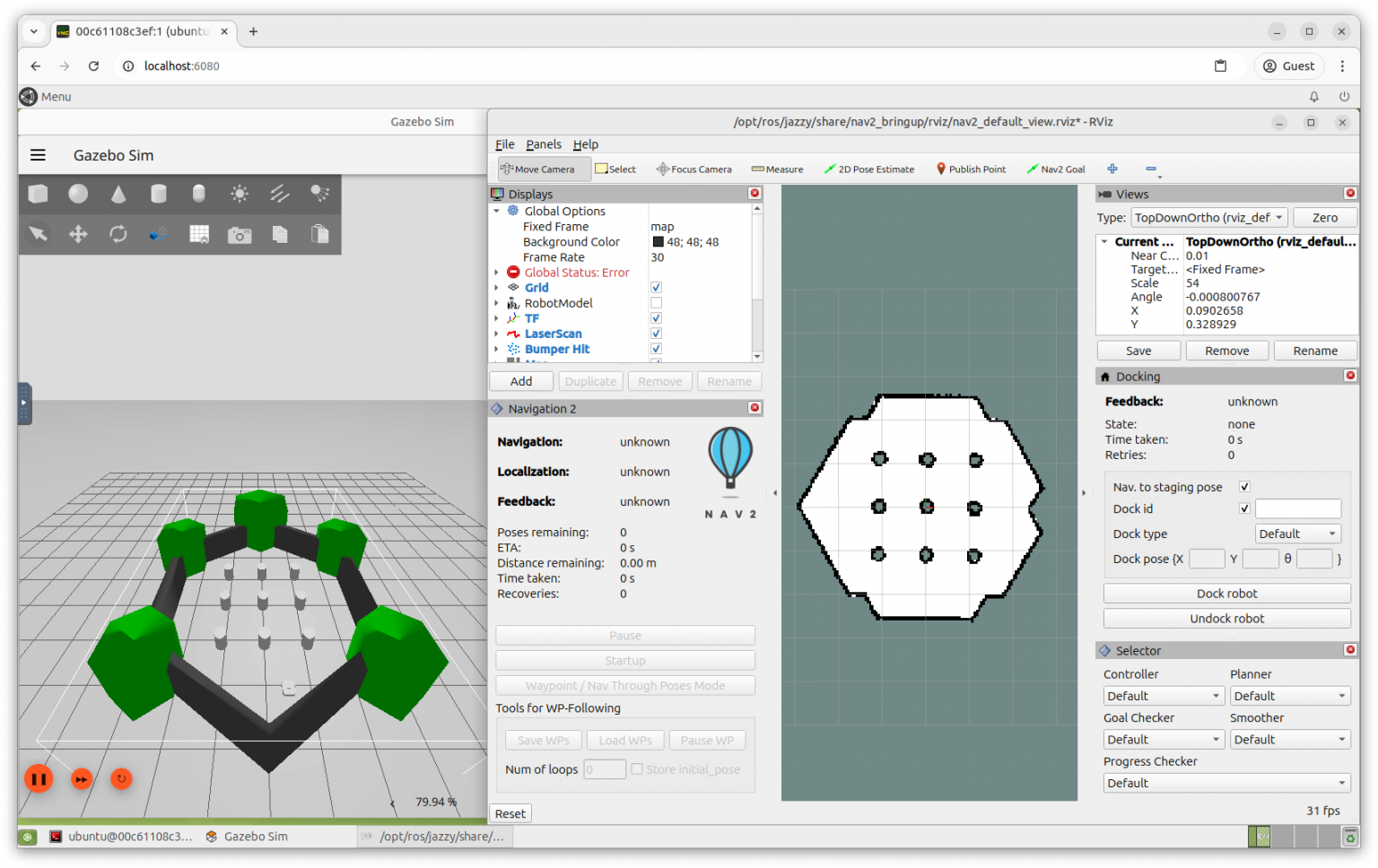
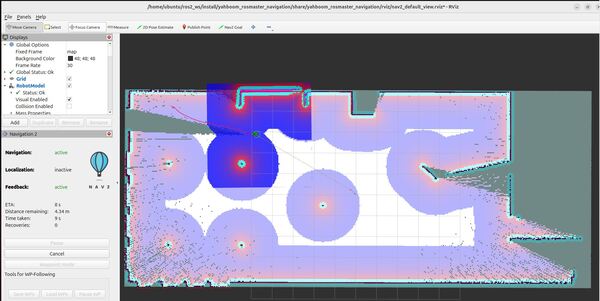
TurtleBot3 + Gazebo + Navigation2 (ROS 2 Jazzy) | Memoteki
ROS 2 Tutorial 1: Learn the Basics of ROS 2 by Using Turtlesim ...
ROS 2 Jazzy公式チュートリアル01: ROS 2 Jazzyのインストールから動作確認まで / Yusuke Kato Blog
ROS 2 Jazzy Jalisco Released — Open Robotics
ROS2 Jazzy Tutorial: Learn Basics of ROS 2 Jazzy Jalisco by using the ...
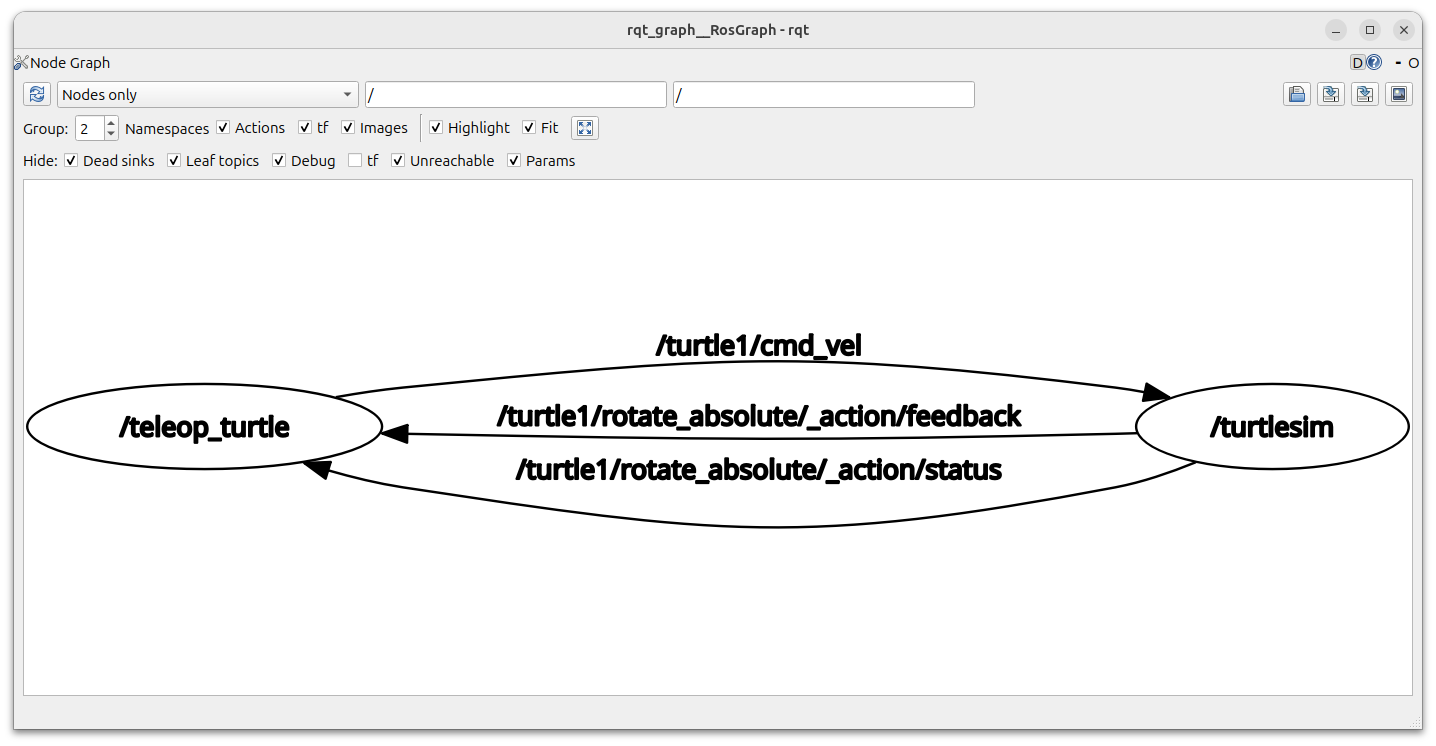
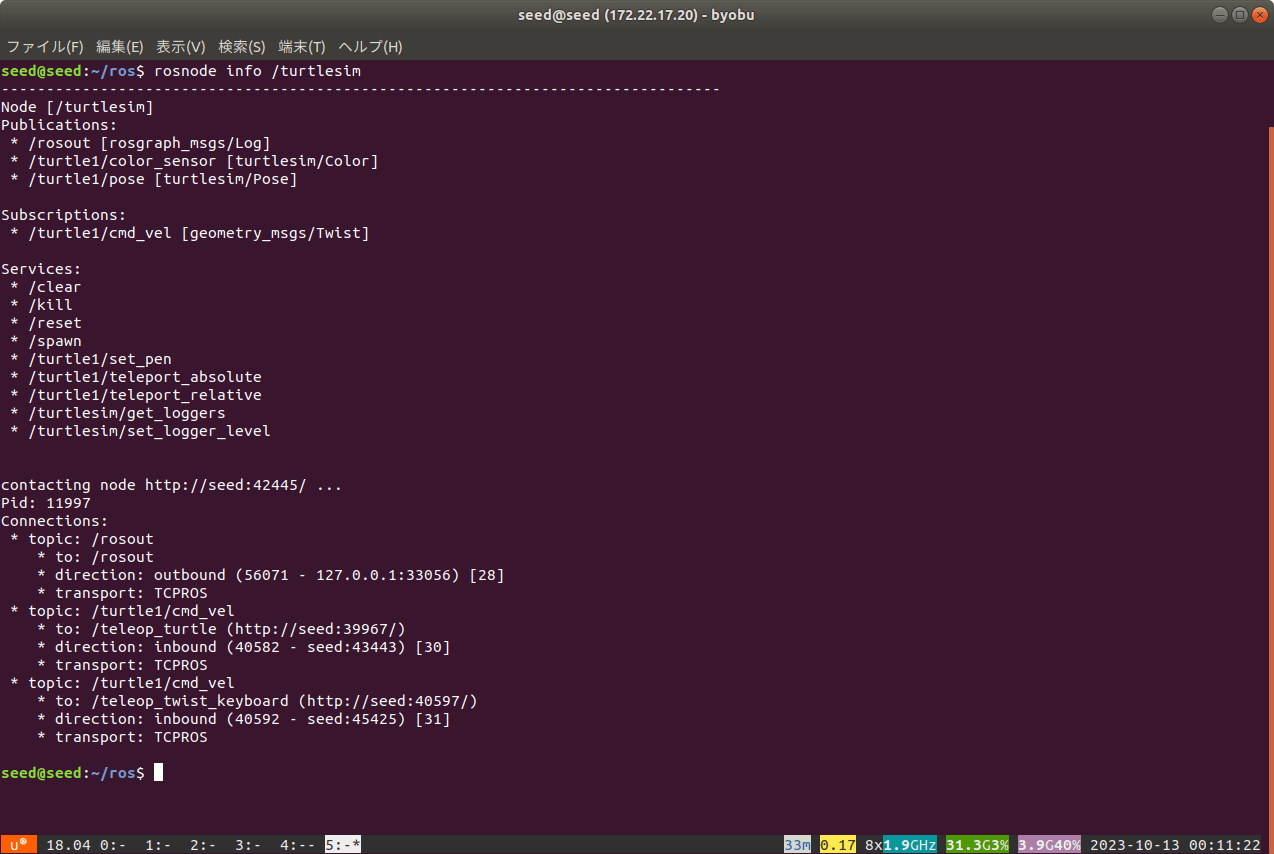
ROS 2 Tutorial 2: Explanation of Node-Topic Structure of ROS 2 System ...
The ROS Command Line Interface - Programming Multiple Robots with ROS 2
How to Install ROS 2 Jazzy
How to Install ROS 2 Jazzy - YouTube
Autonomous Navigation for a Mobile Robot Using ROS 2 Jazzy
Introducing tf2 — ROS 2 Documentation: Jazzy documentation
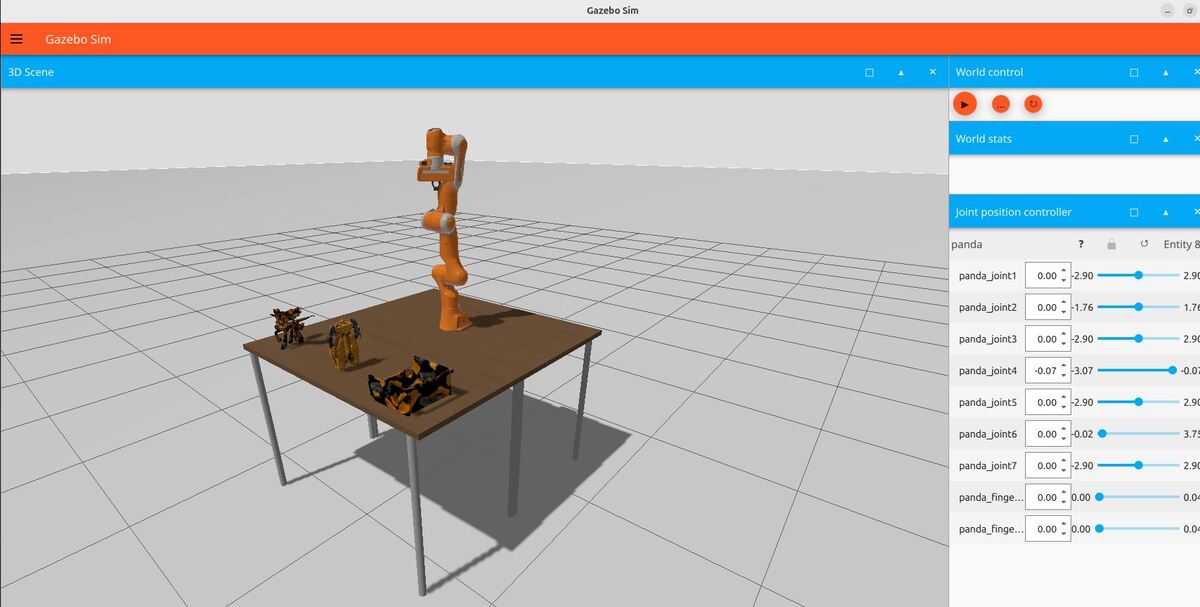
How to Simulate a Mobile Robot in Gazebo – ROS 2 Jazzy
TurtleBot 4 Now Supports ROS 2 Jazzy - Clearpath Robotics
Building a Map of the Environment Using SLAM – ROS 2 Jazzy
ROS 2 For Beginners (ROS Jazzy – 2025): ツール (セクション4/11)|Hafnium
【ROS2入门】理解 ROS 2 节点_ros2节点-CSDN博客
ROS 2 Humble 公式チュートリアル 01: 環境構築から turtlesim まで / Yusuke Kato Blog
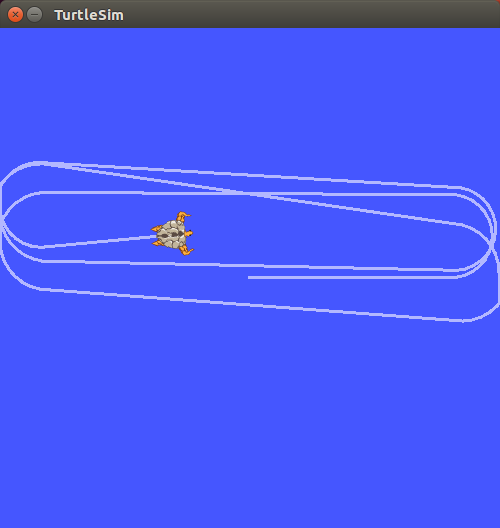
Launch the Turtlesim Robot Simulation in ROS
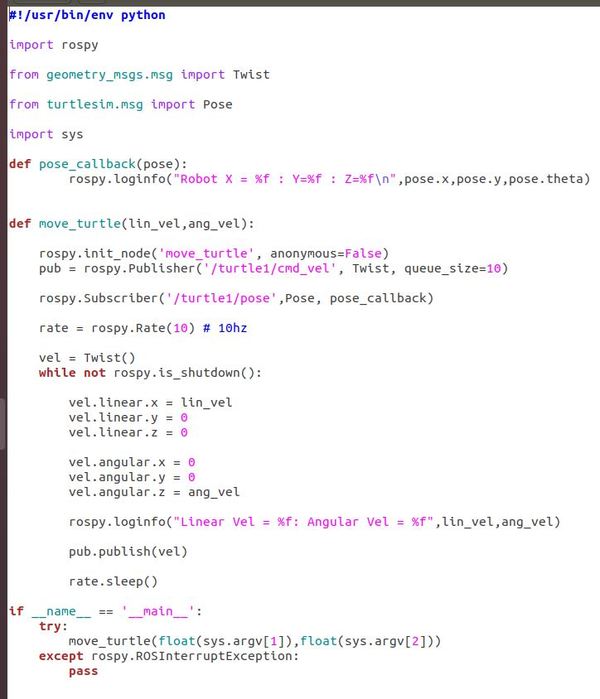
Implementing the ROS Turtlesim Project With rospy
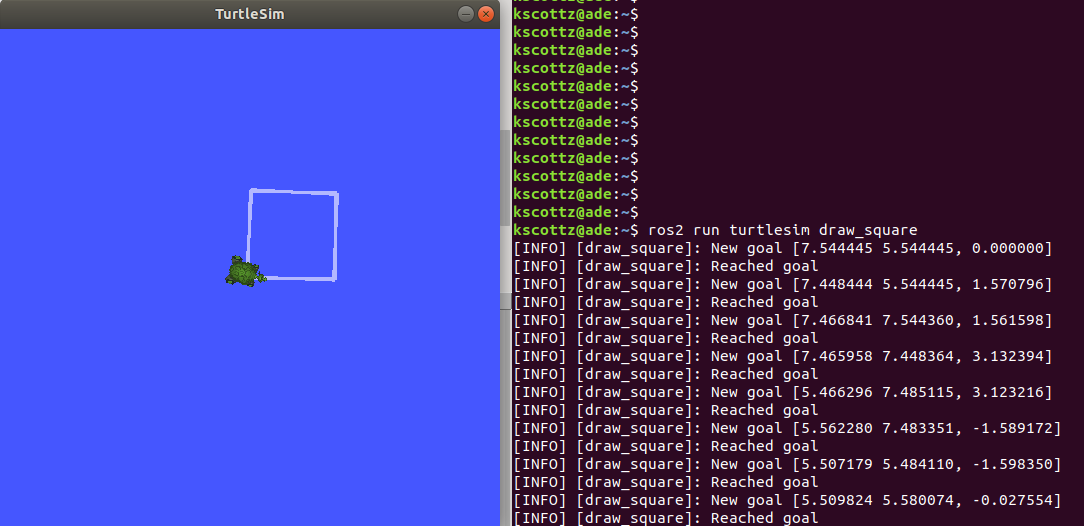
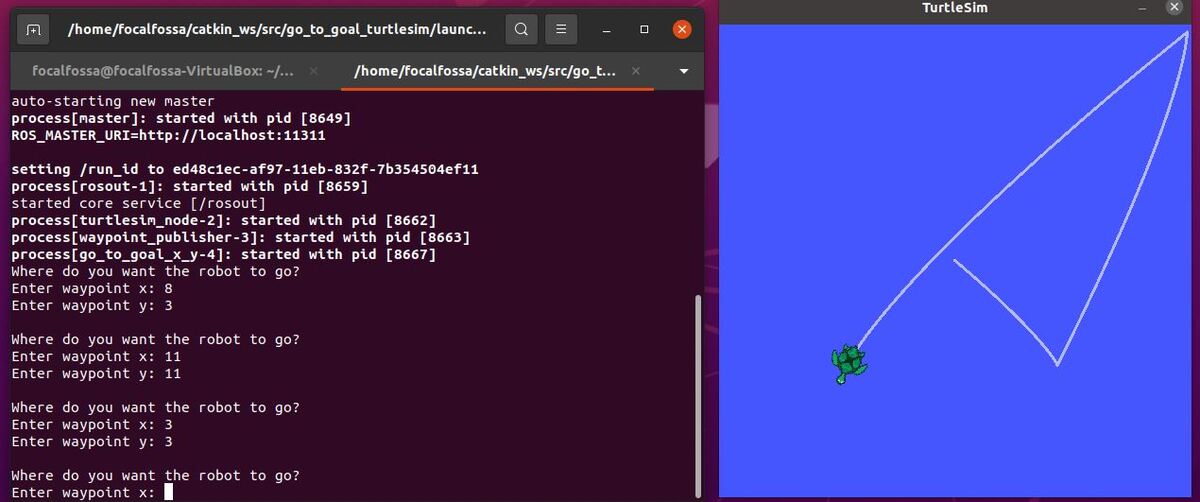
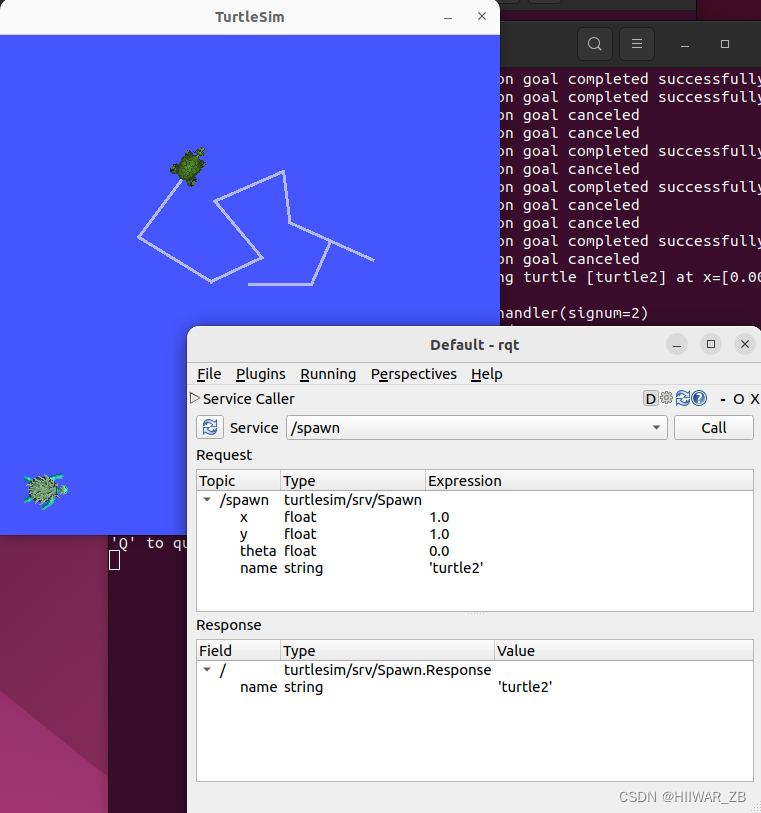
How to Move the Turtlesim Robot to Goal Locations – ROS
Windows で ROS のシミュレーションを行う (3) Turtlesim で ROS を体験する
Windows で ROS のシミュレーションを行う (4) TurtleBot3 をプログラムで制御する
ROS 2(二)熟悉ROS 2的使用和工具(turtlesim\ros2\rqt)_ros2 rqt humbe 安装-CSDN博客
改訂新版 ROS 2ではじめよう 次世代ロボットプログラミング | プログラミング・システム開発,電子工作・PIC・組込み・IoT,組込み ...
ROS practice #2 turtlesim in package
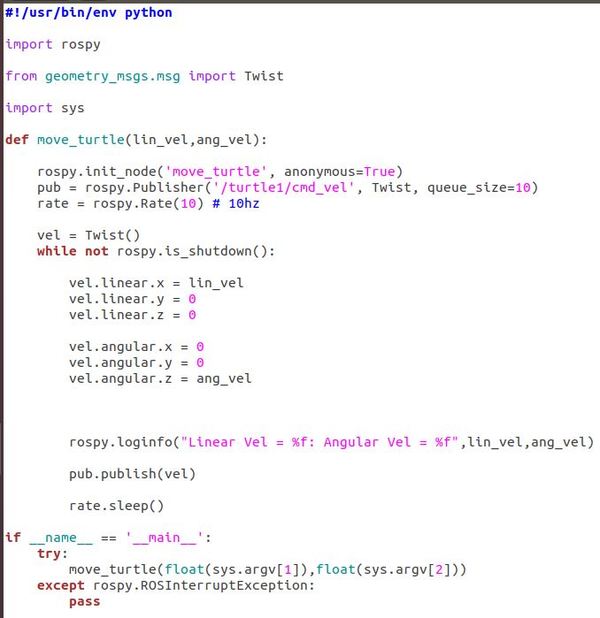
【ROS2講座④】自作したプログラムのTurtlesim制御【Python】 | 魁高専 -SAKIGAKE Colleges of ...
ROSによるロボット操作法 Part-2 シミュレーション(Turtle)編
ROS2 Jazzy Tutorial: Control Turtlesim Robot Simulation from Python ...
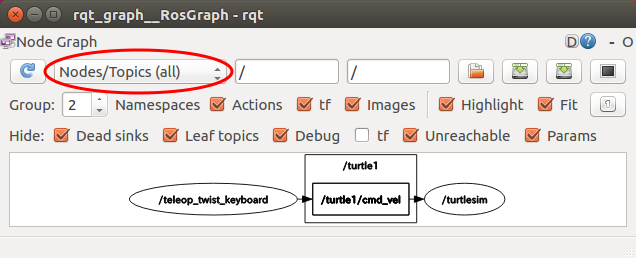
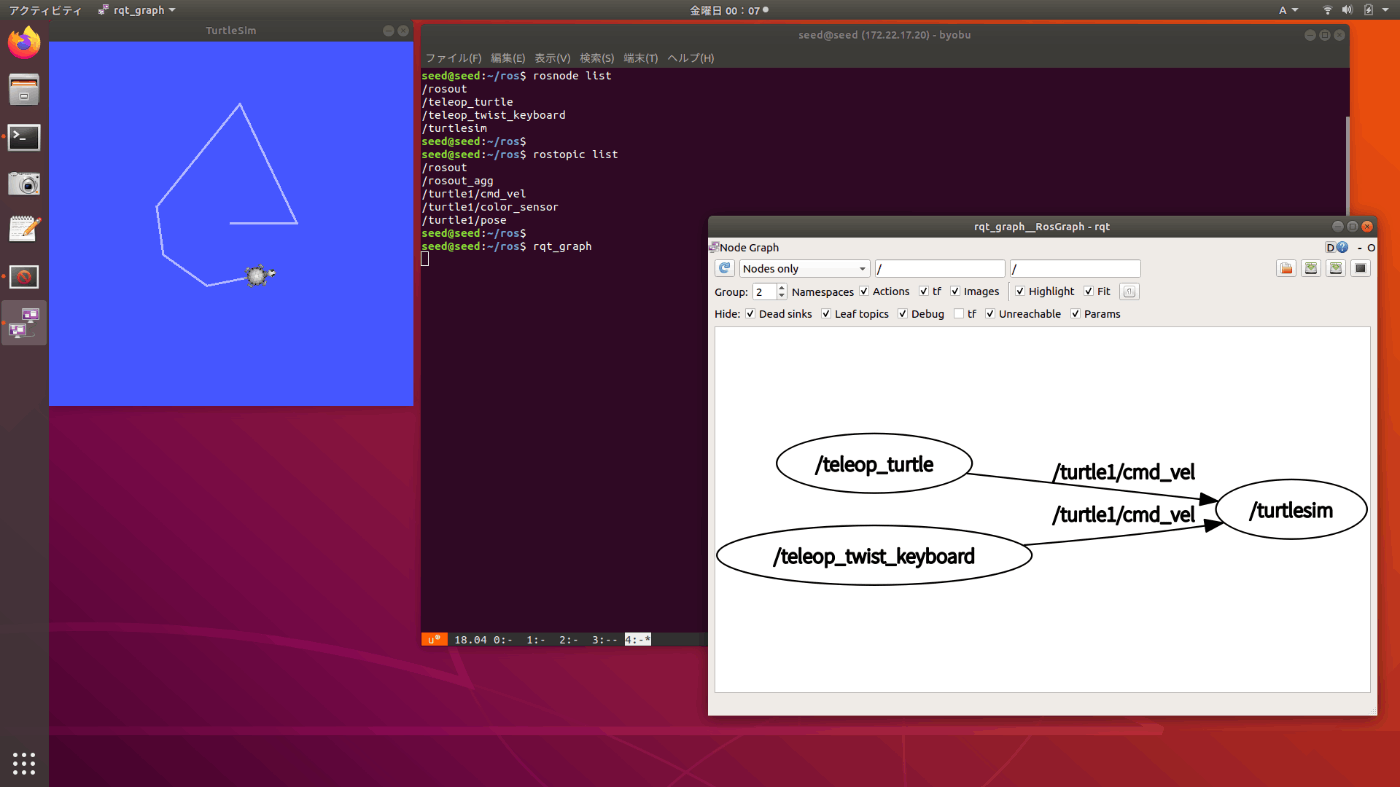
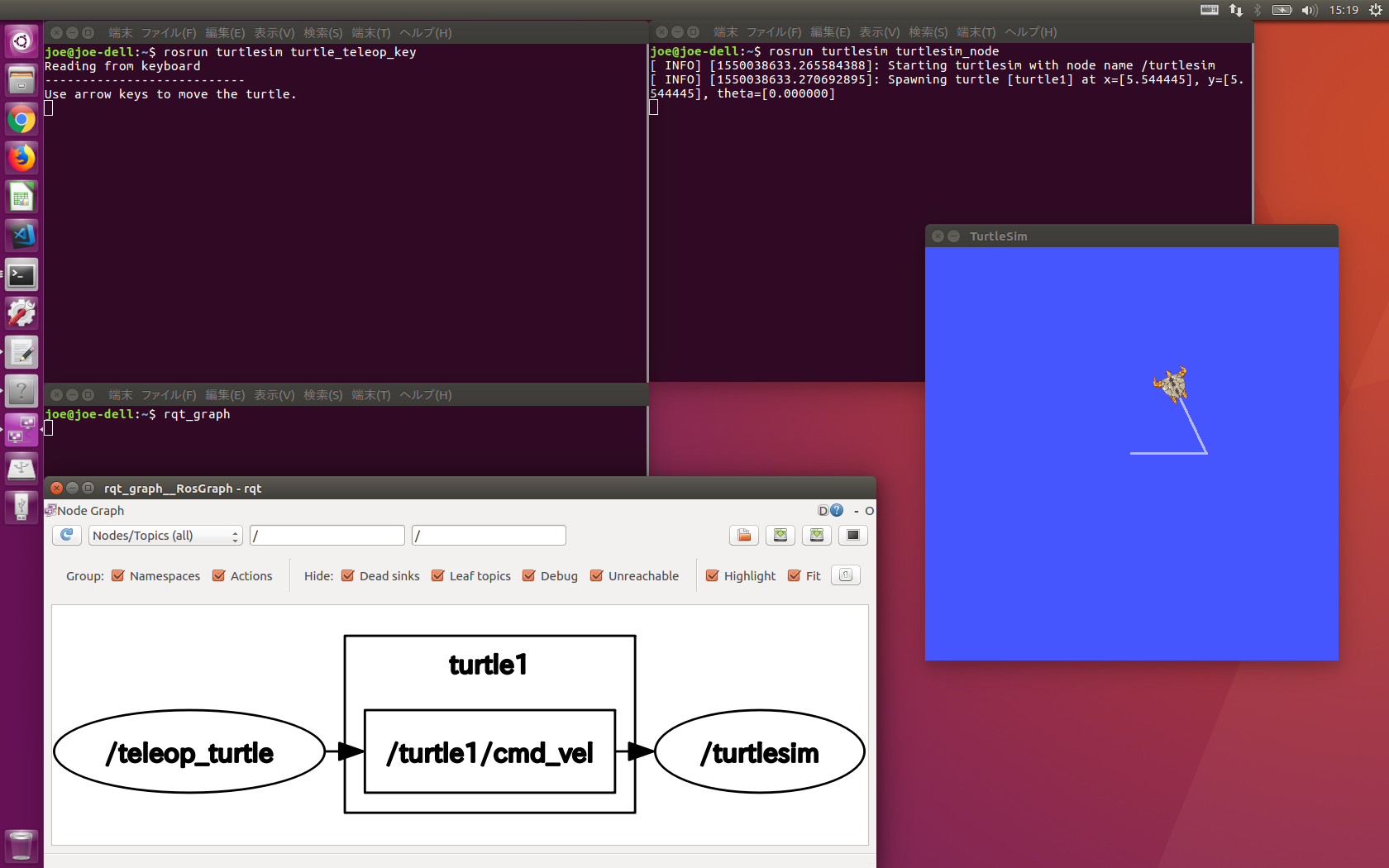
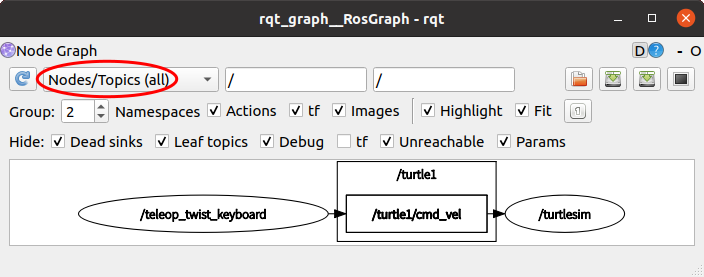
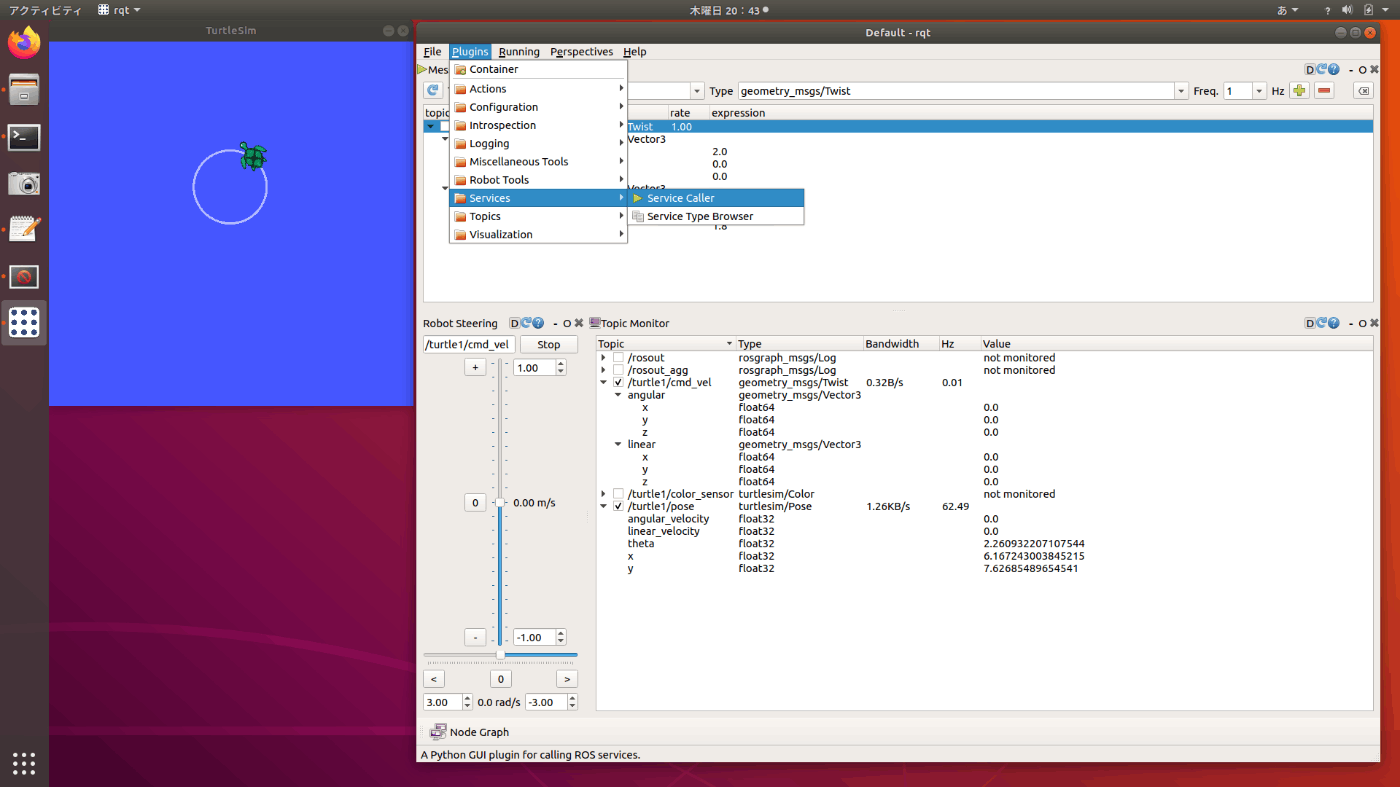
ROS2 Tutorials – Using turtlesim, ros2, and rqt | HeavyMoon
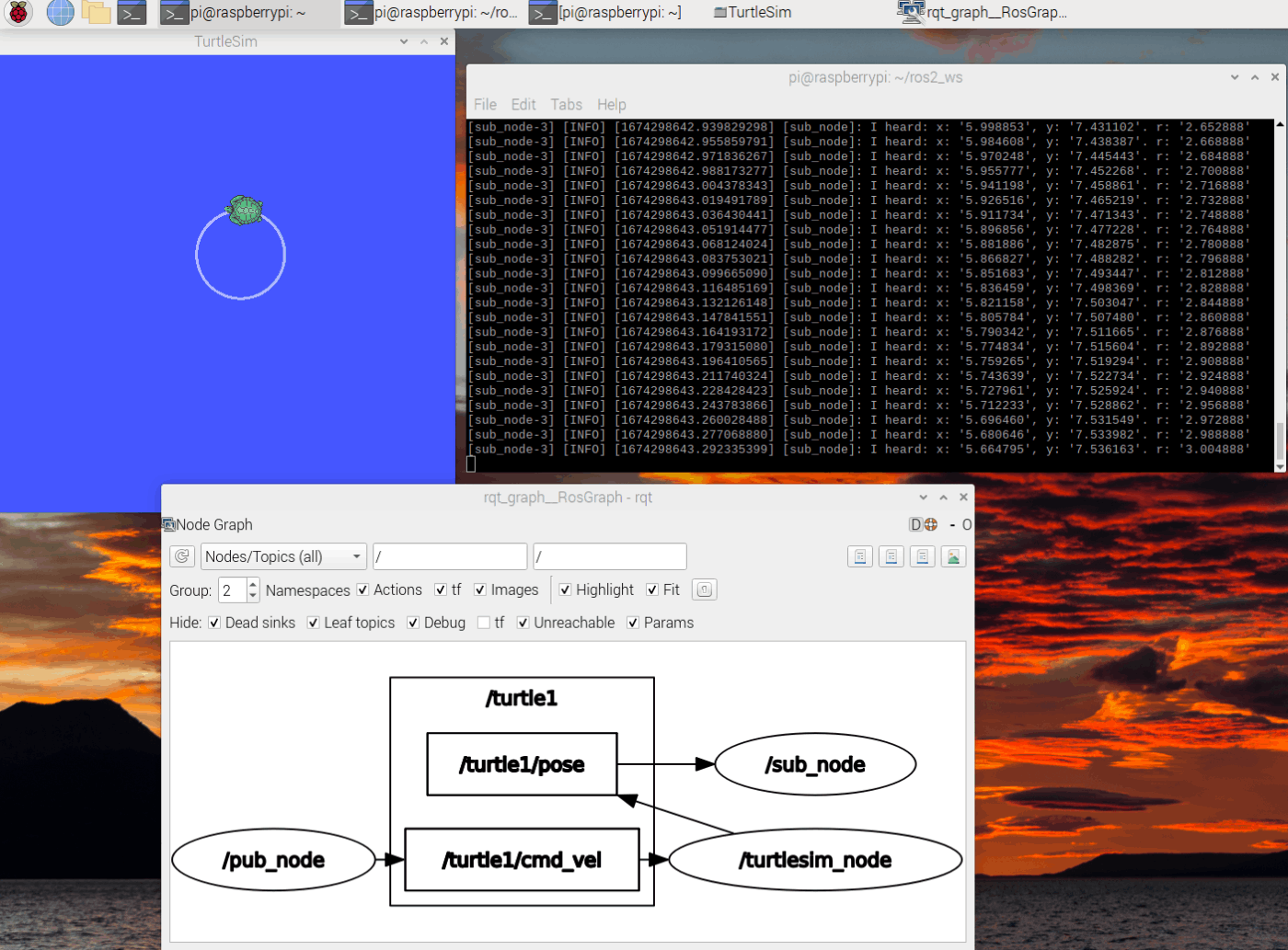
ROS演習2:Turtlesimで現在位置のSubscribe
【ROS2講座①】ノードとトピック【Python】 | 魁高専 -SAKIGAKE Colleges of Technology-
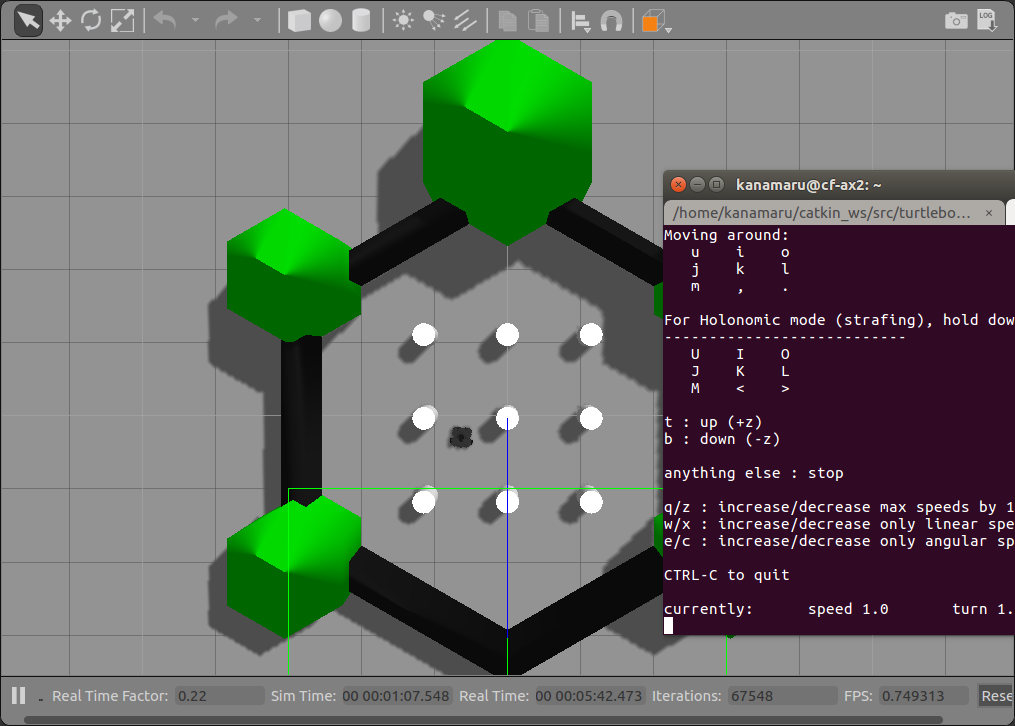
【ROS2 Jazzy】TurtleBot3をシミュレーションしてみた(エラー解決あり) | AIで遊ぶ・学ぶ・作るブログ
turtlesimで学ぶ ROS2入門 〜カメを動かして学ぶロボットプログラミングの第一歩〜
Getting Start with ROS2- Turtlesim | by Anjita Gargi Chandora | Medium
ROS2を使ってみる その2(Turtlesim、rqt、Windows) - 趣味的ロボット研究所
GitHub - htil/Getting-Started-with-ROS2-TurtleSim-and-Python ...
Windows で ROS2 のシミュレーションを行う (3) Turtlesim で ROS2 を体験する
ROS2とPythonで作って学ぶAIロボット入門 改訂第2版 (KS理工学専門書) | 出村 公成, 萩原 良信, 升谷 保博, タン ...
ROS2 チュートリアル turtlesimとrqt(Using turtlesim and rqt) - Symfoware
ROS开发实践(十五)——ROS中 Turtlesim 功能包探索(含功能包入口参数讲解)_如何让turtlesim订阅新的节点的信息-CSDN博客
2.ROS2の基礎とROS2コマンド - ROS2 Tutorials
RTMとROSの連携コンポーネントの作成(eSEAT)
ROS: Home
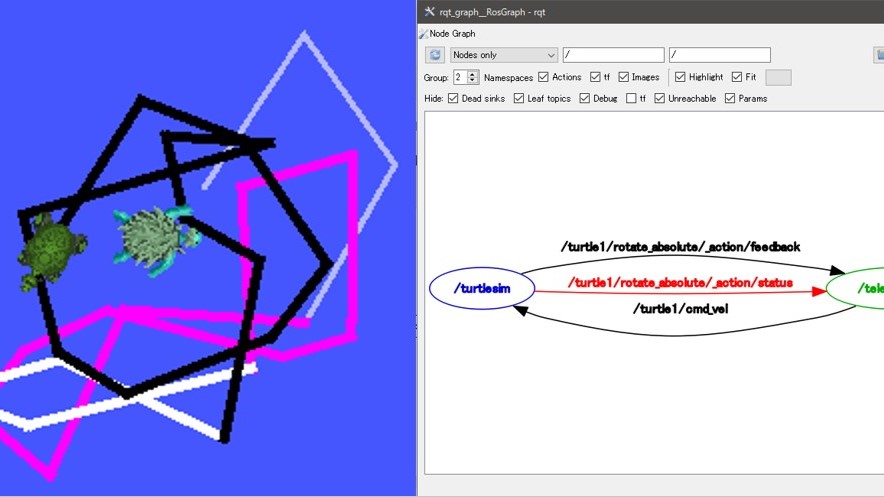
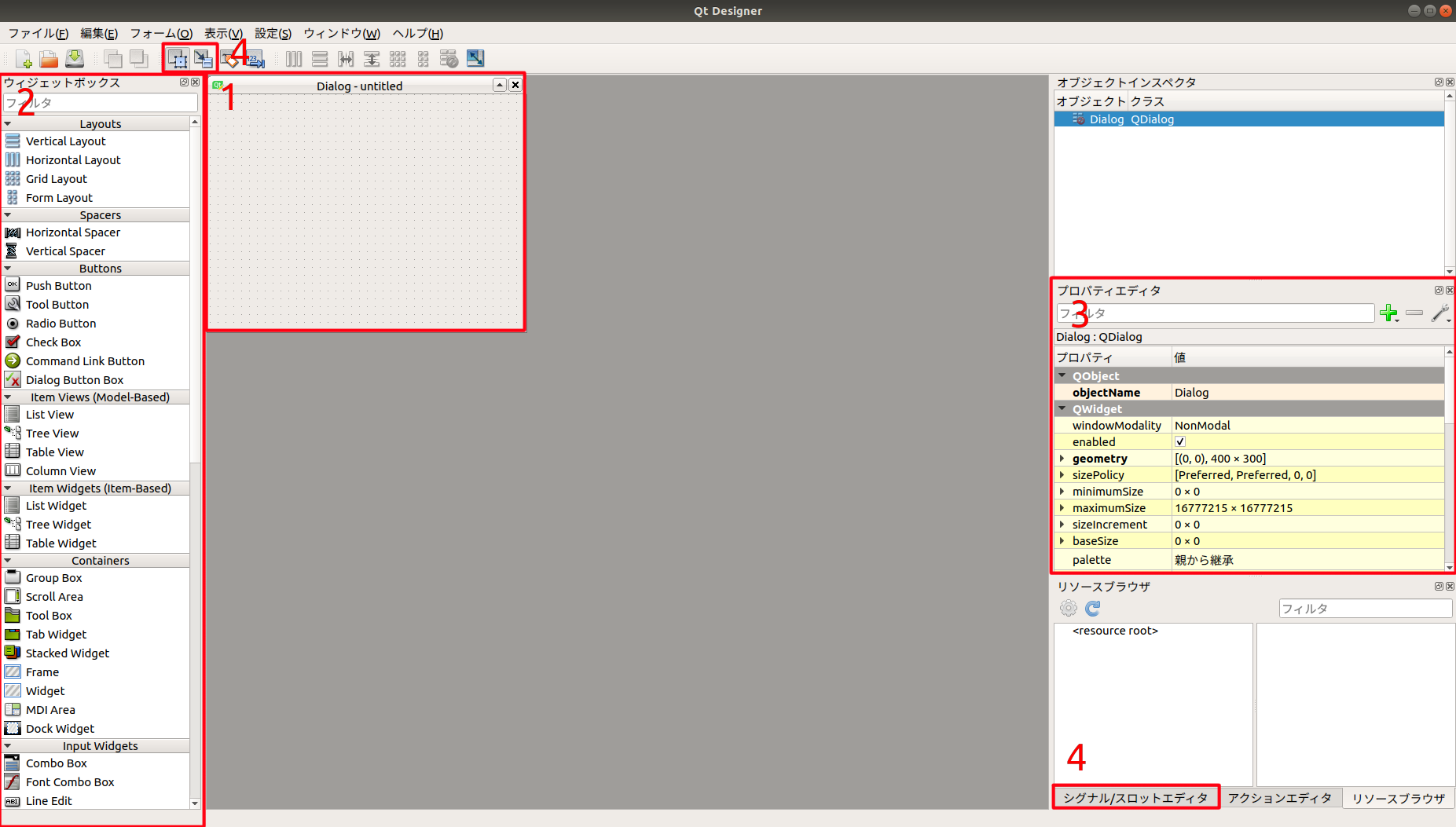
TurtleSim(ROSシミュレータ)のGUIをpyqt5で自作する #Python - Qiita
ROSのチュートリアル
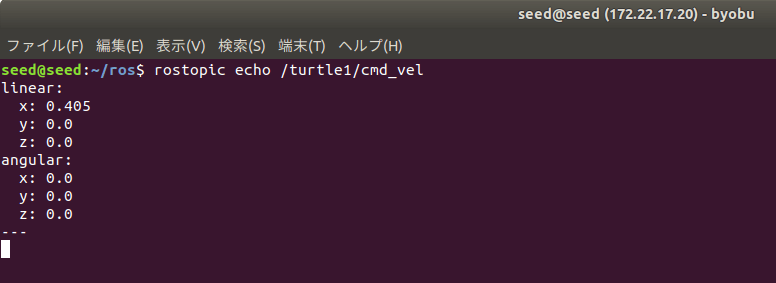
ROS演習1:TurtleSimで簡単なTwistトピックのPublish
ros2 構成 | ros2 使い方 – YGNR
turtlesimを全方向移動に対応させるPRをマージしてもらった話 | Memoteki
Docker & Jetson Docker
ROS2プログラミング入門 #6 亀を制御する
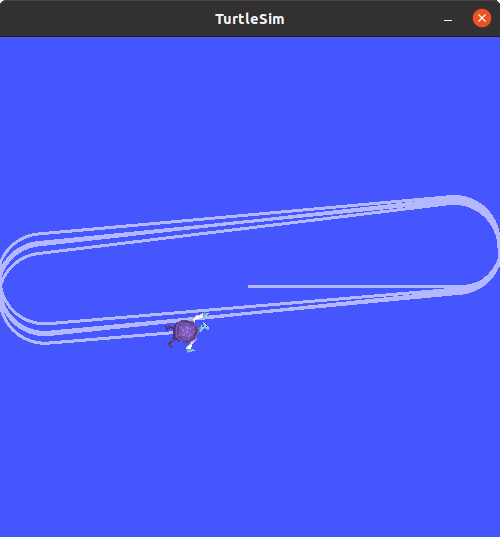
ROS演習1:タートルを動かそう! – demura.net
ロボット制御 #14 ROS2 Jazzy を学ぶ | ロボットをつくってみる
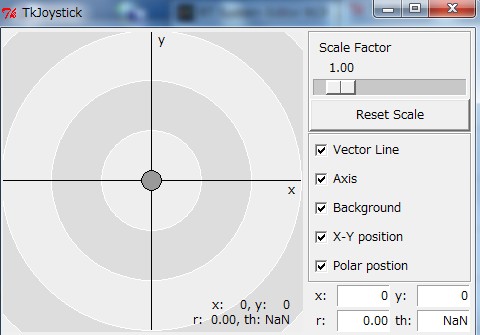
【ROS2】Logicoolの無線コントローラーF710でTurtlesimを動かしてみた - 佐藤百貨店
Windows で ROS2 のシミュレーションを行う (4) TurtleBot3 をプログラムで制御する
ロボット制御 #12 ROS2を使ってみる(RasPi5編) | ロボットをつくってみる
20250111.WSL2のUbuntu24とROS2のJazzyにアップデート : ラジコンをラズパイでROS制御
ROS2 チュートリアル サービスについて(Understanding services) - Symfoware
ROS2演習6-2021:簡単なサービス通信しよう!(Python) – demura.net