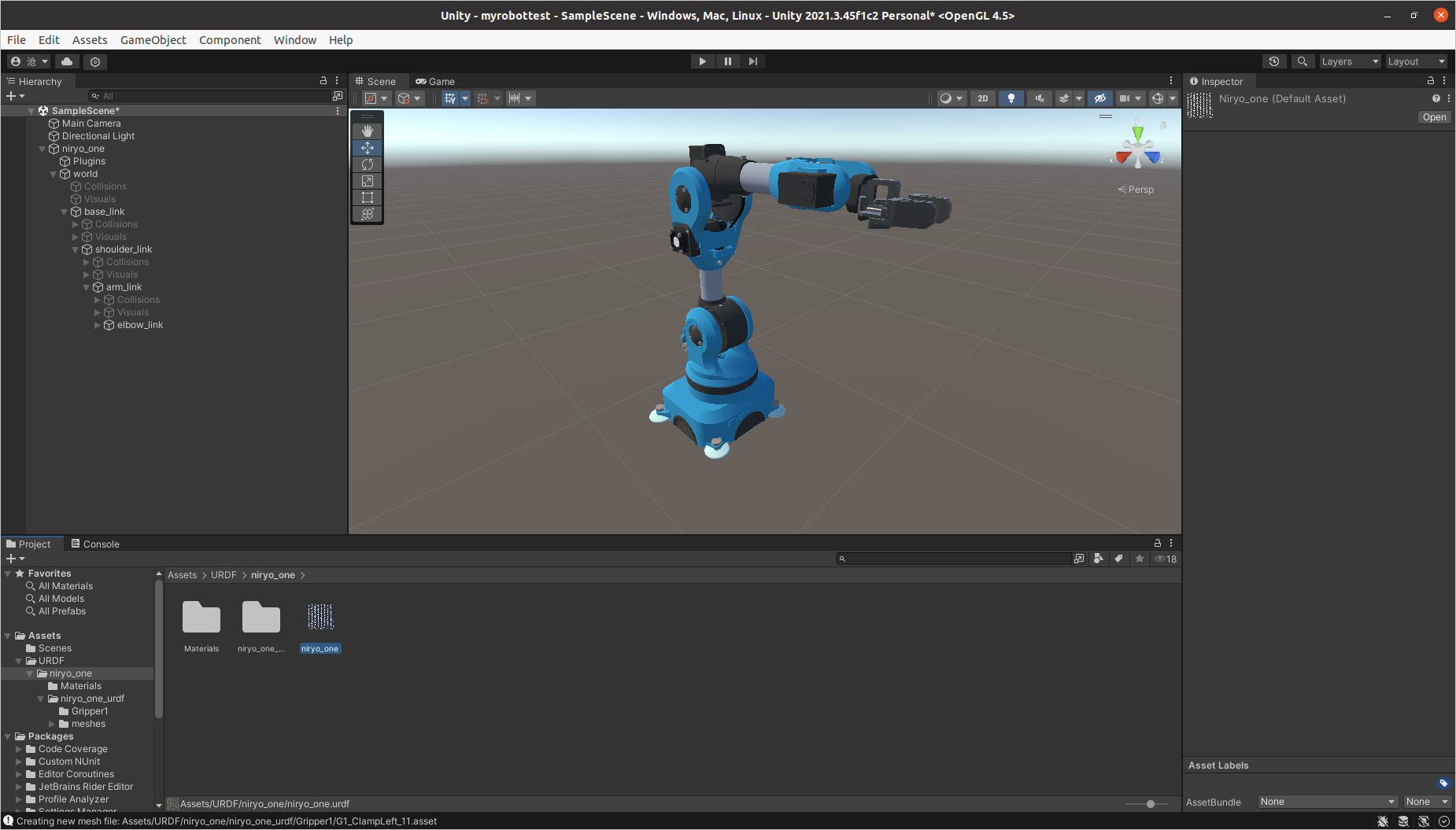
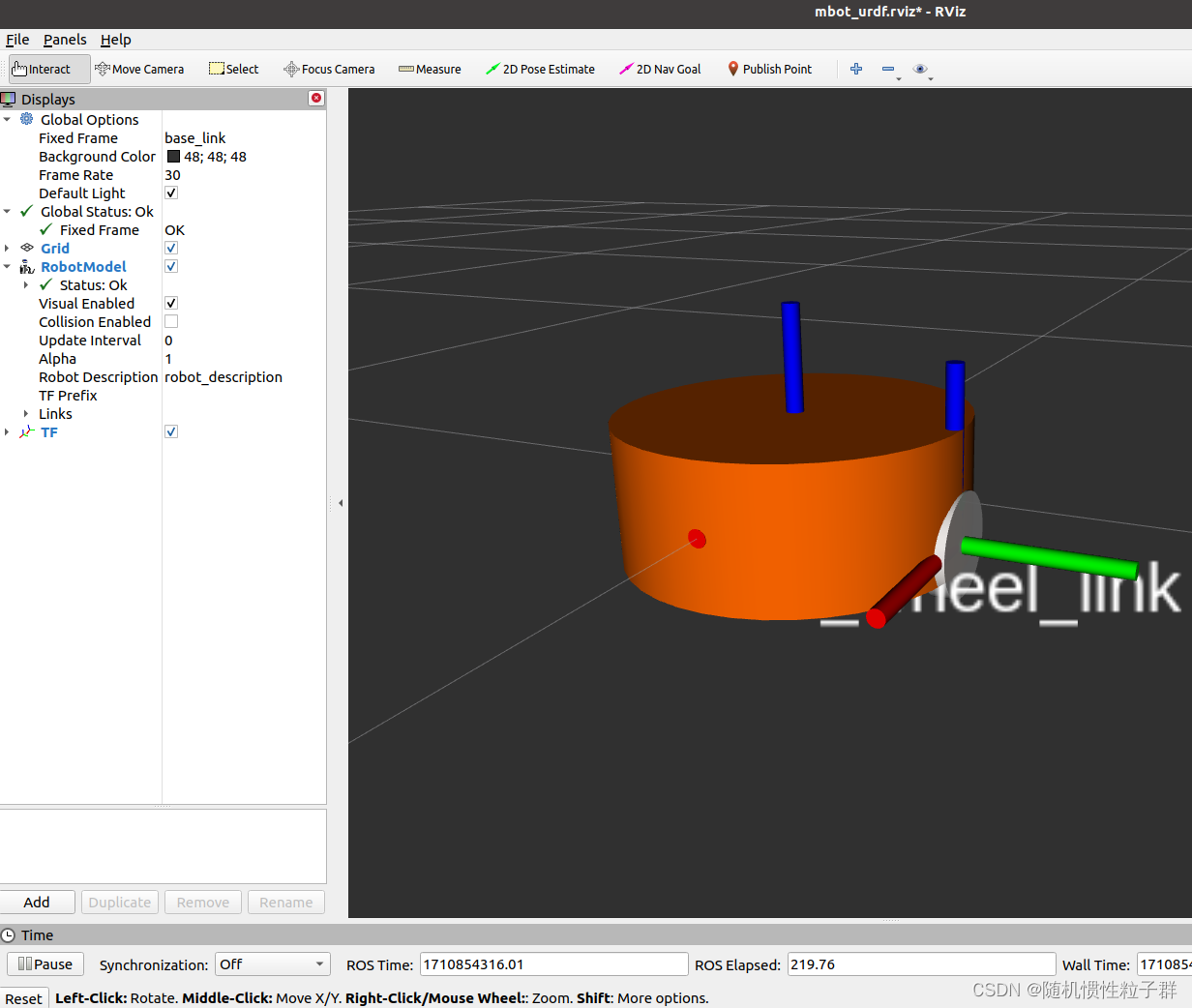
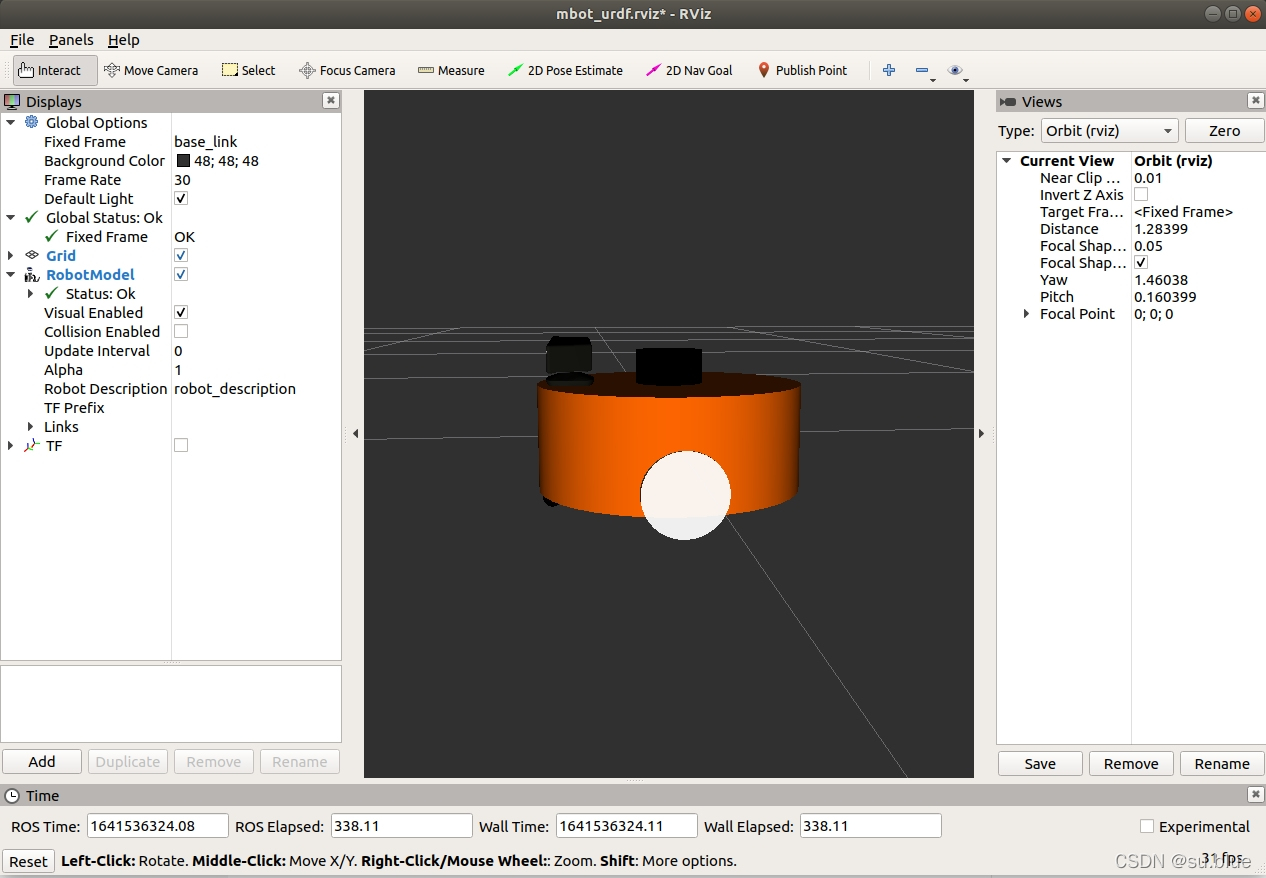
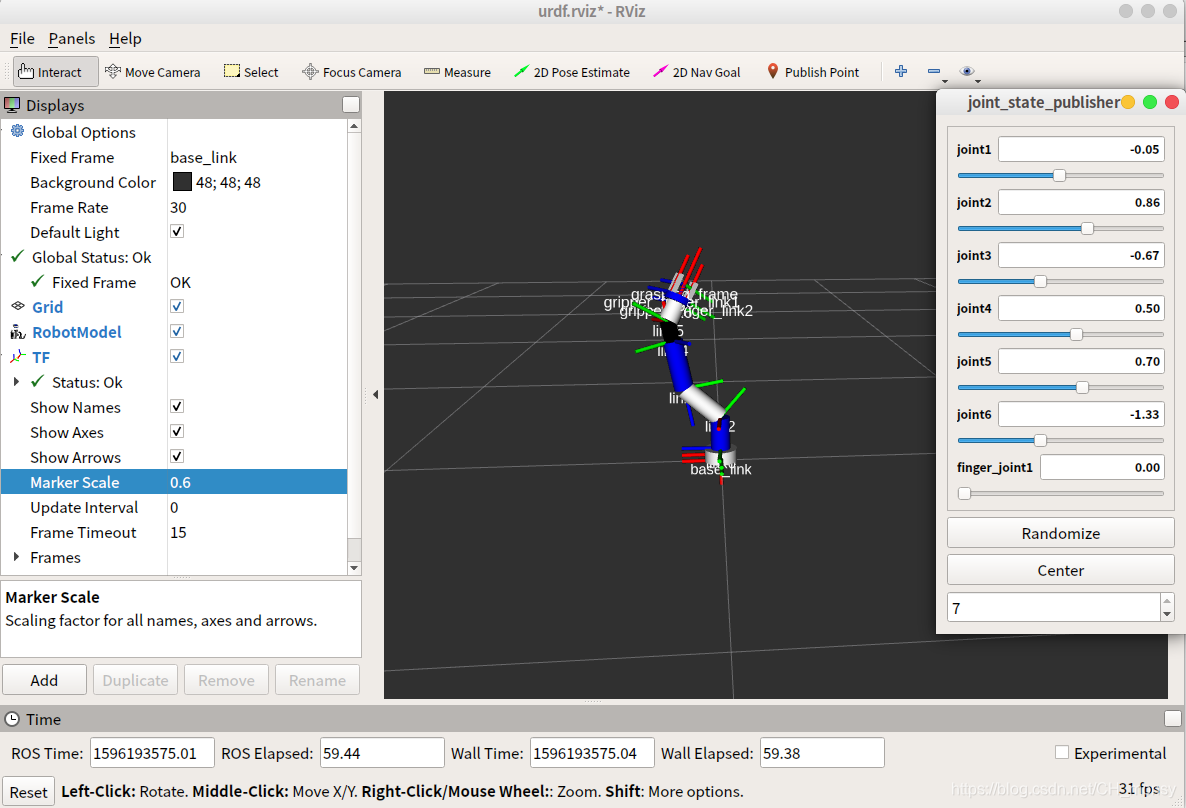
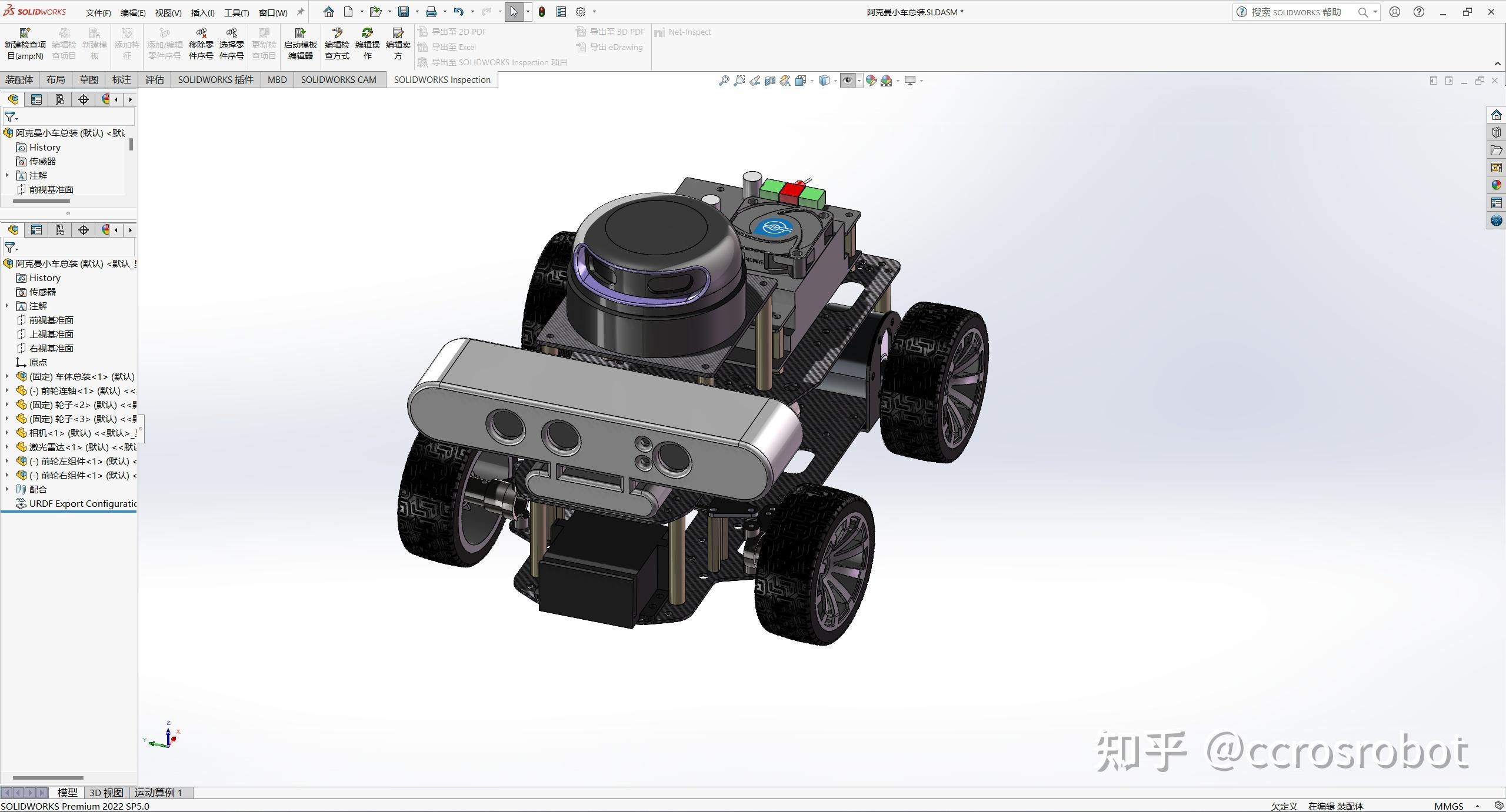
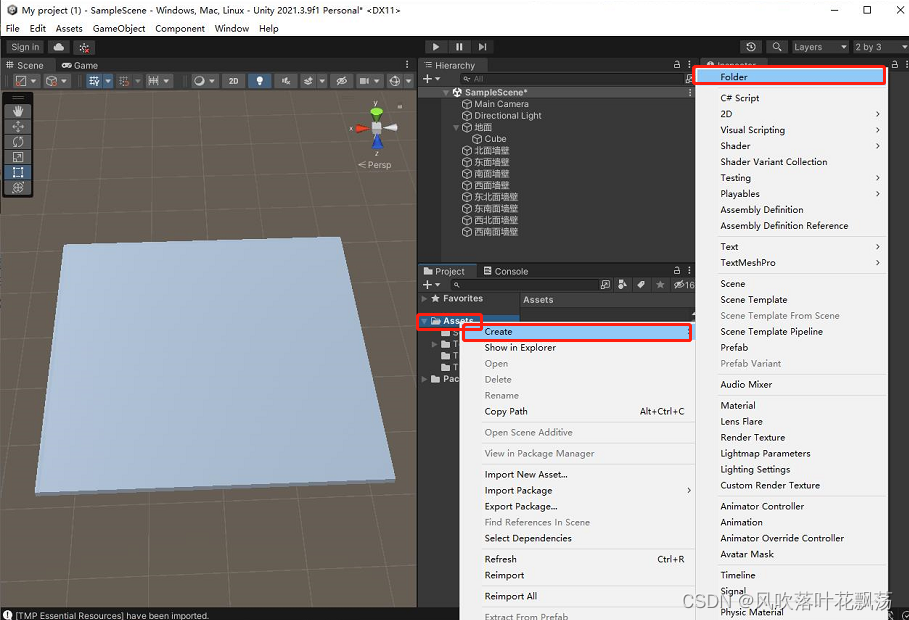
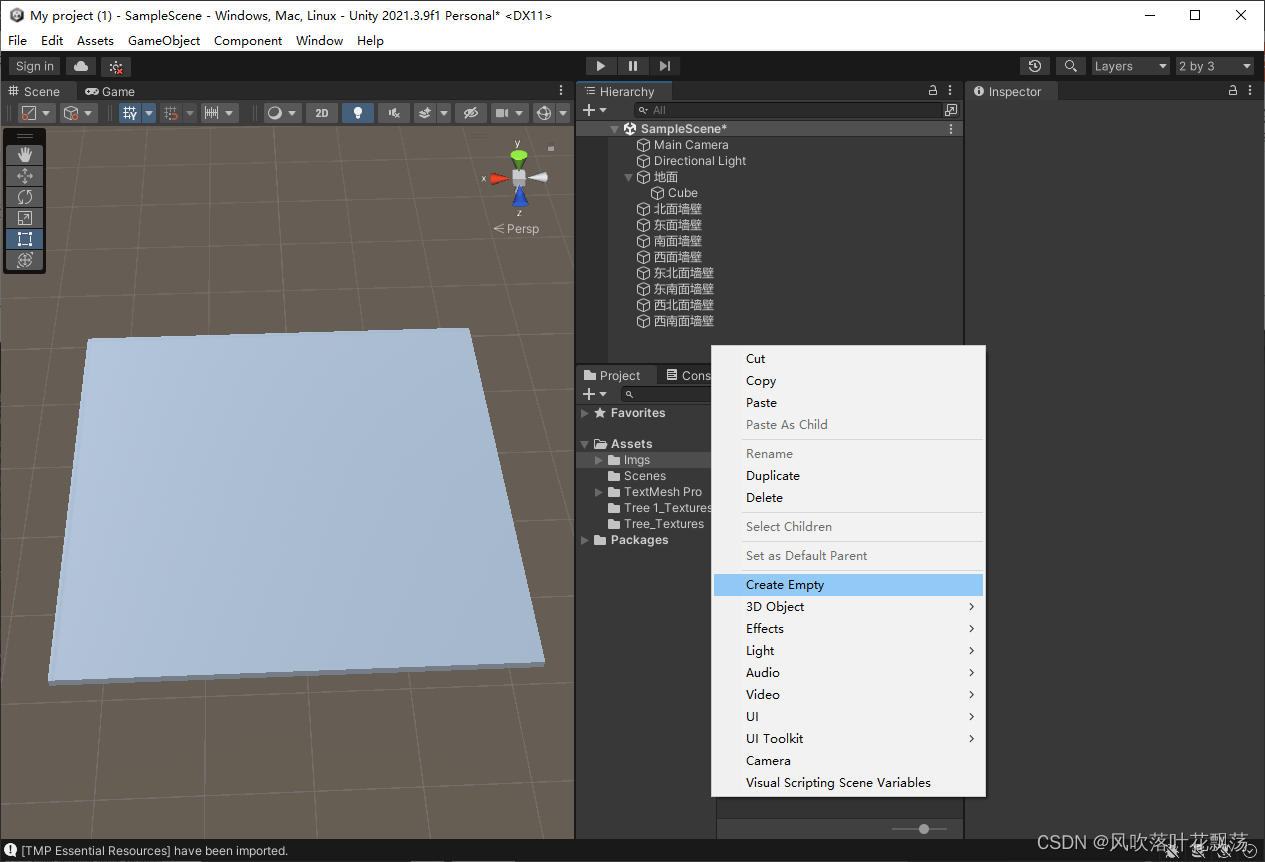
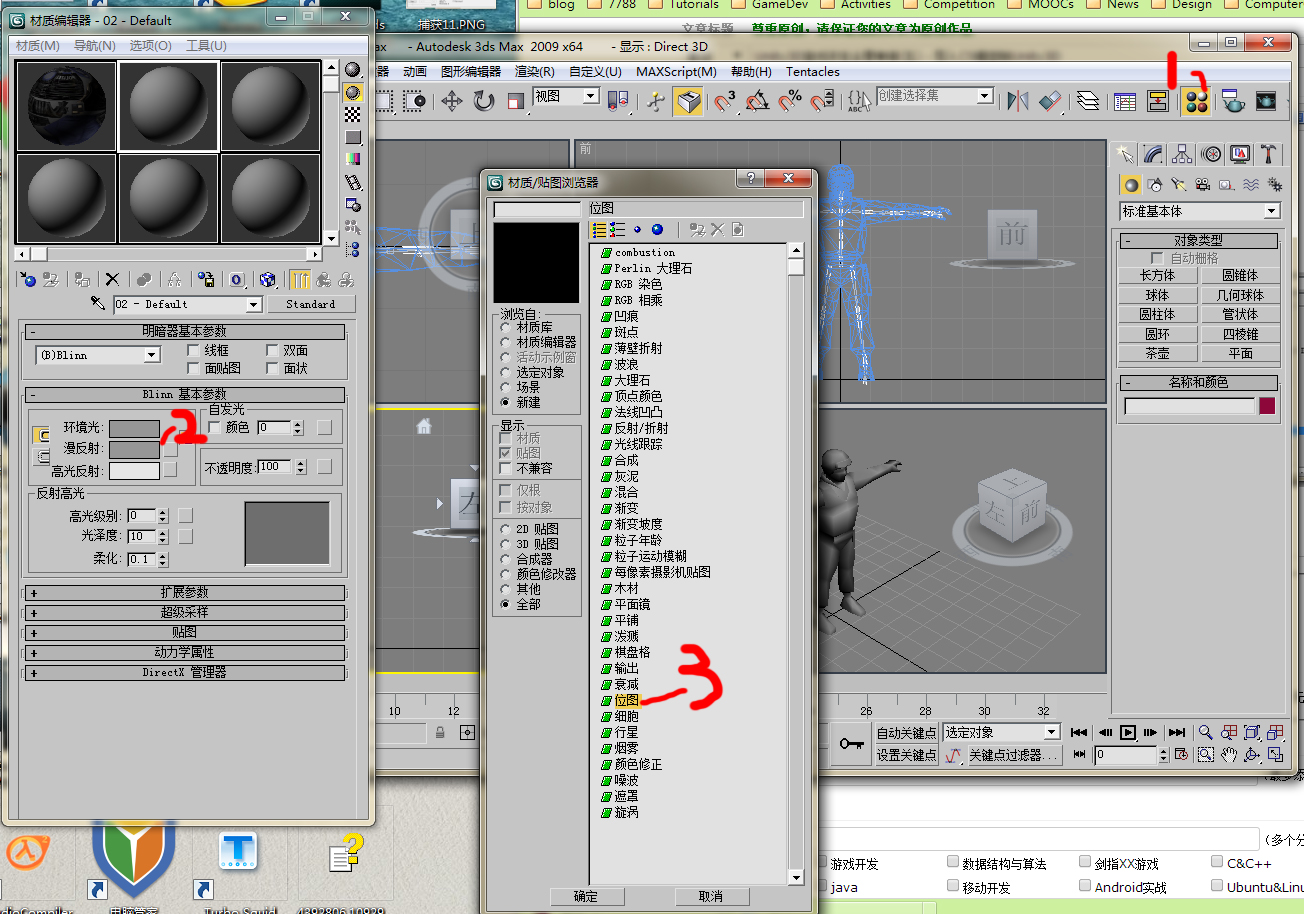
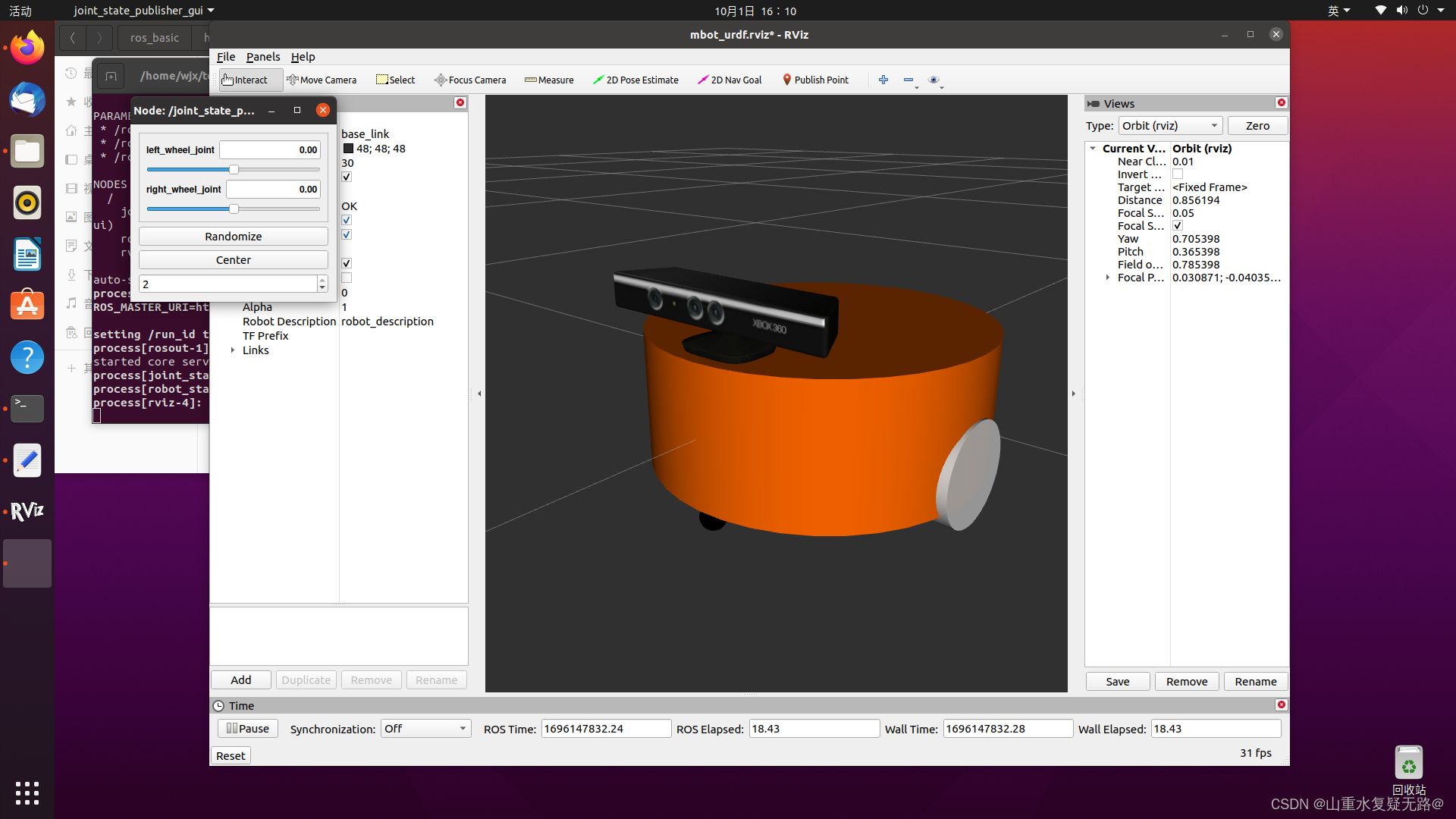
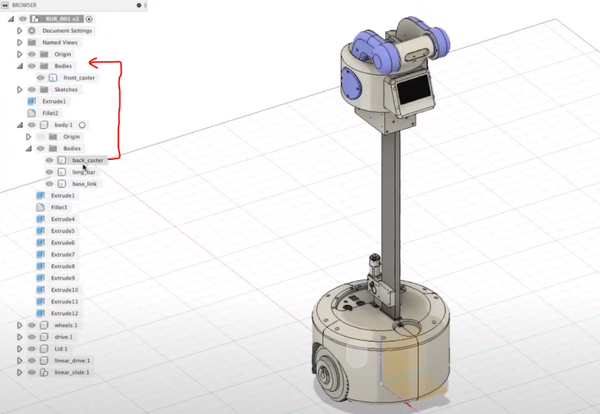
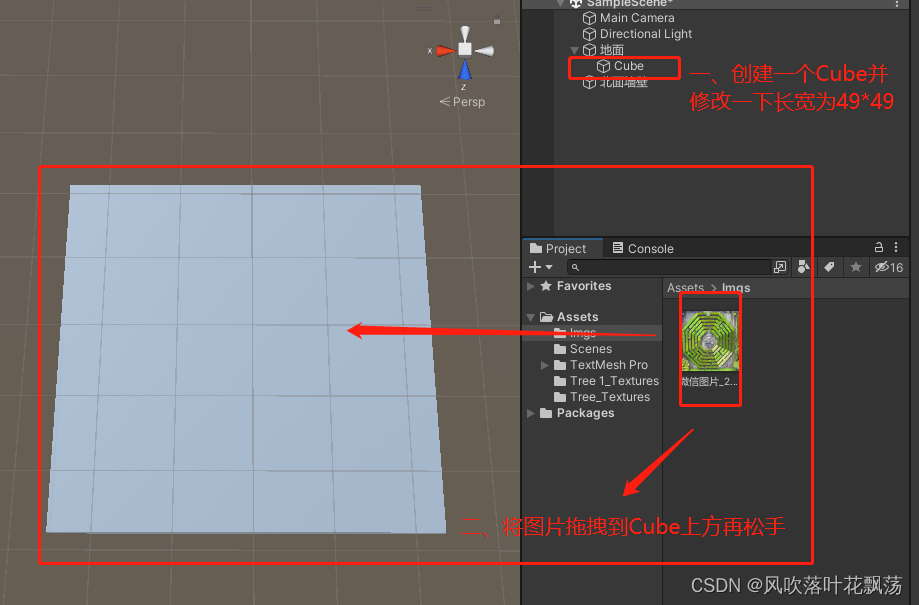
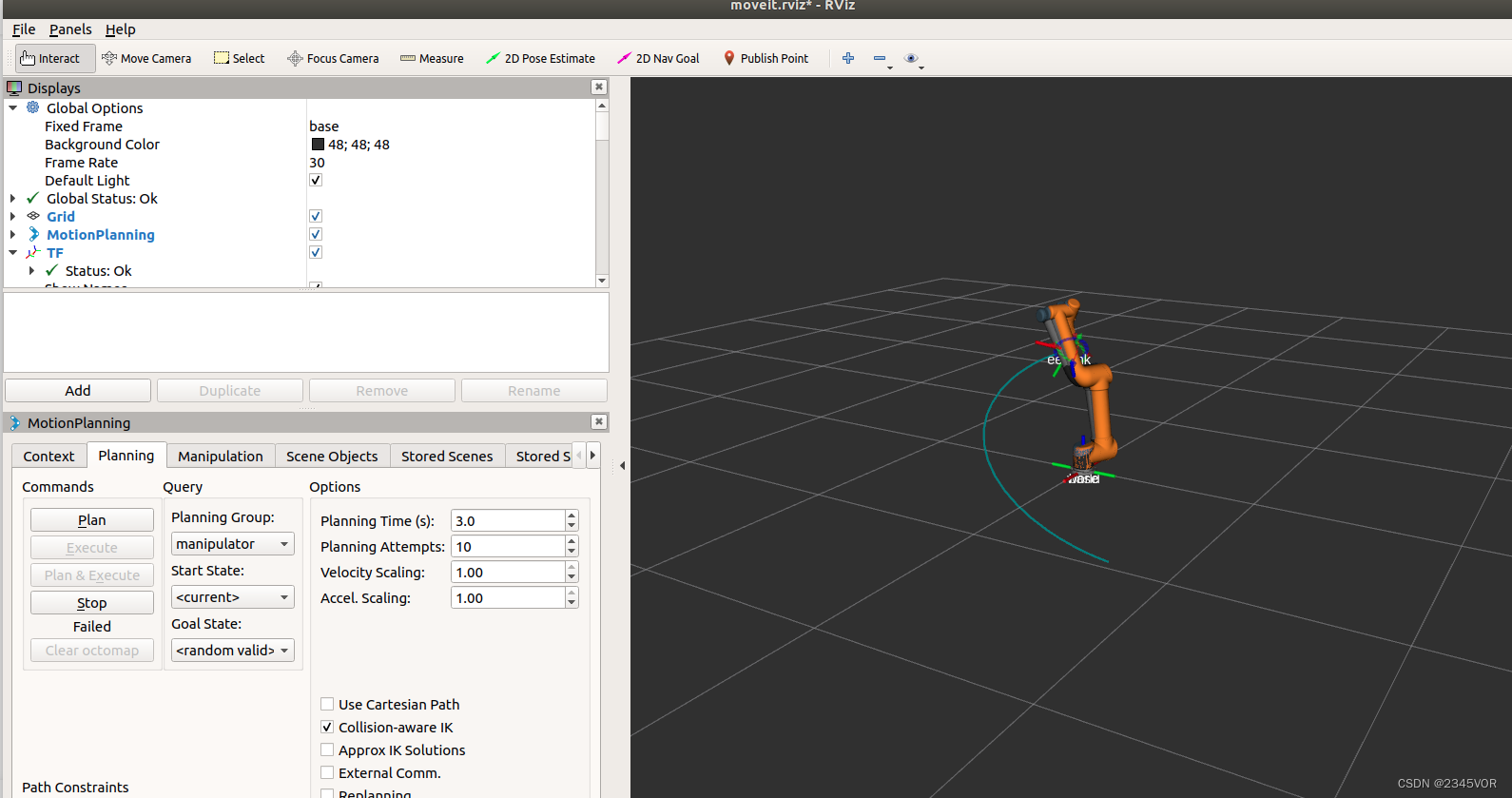
(一)从零搭建unity3d机器人仿真:unity3d导入urdf模型_urdf导入unity-CSDN博客
ROS2中的URDF系列教程(一):从零开始用URDF构建视觉机器人模型 - 知乎
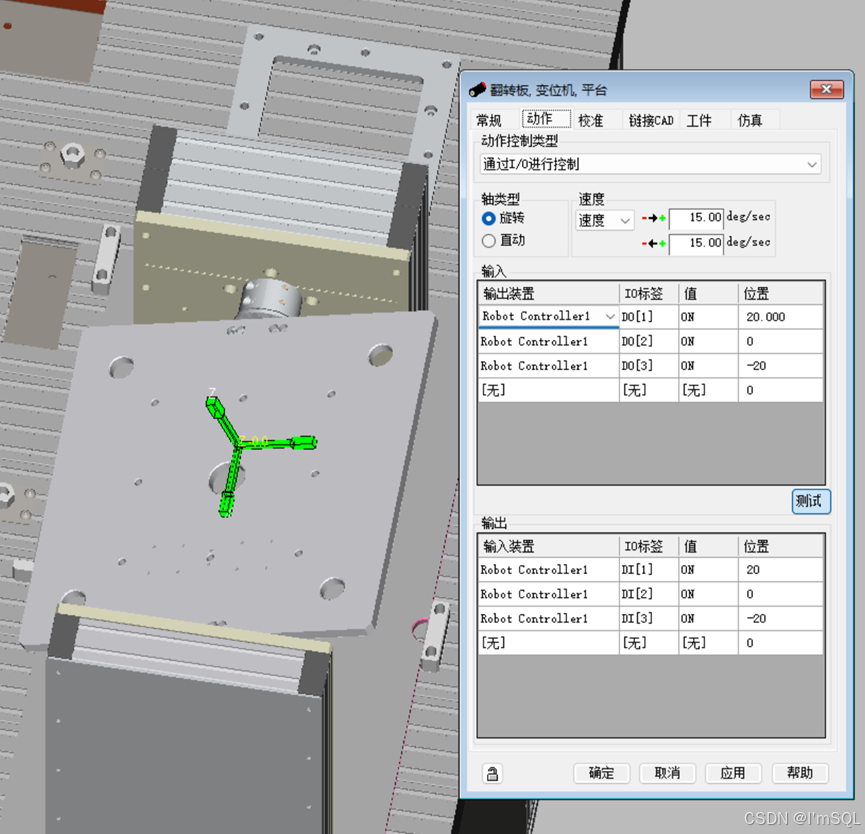
(二)从零搭建unity3d机器人仿真:驱动turtlebot轮子运动_机器人_火星机器人life-魔珐星云开发社区
ROS建模:一起从零手写URDF模型-CSDN博客
机器人xacro文件转换成urdf文件方法,并在rviz可视化_xacro转urdf-CSDN博客
从零开始实现机器臂仿真(UR5+Rviz)_ur5机械臂仿真-CSDN博客
Unity3d数字化看板-多关节机器人运动控制_unity机械臂-CSDN博客
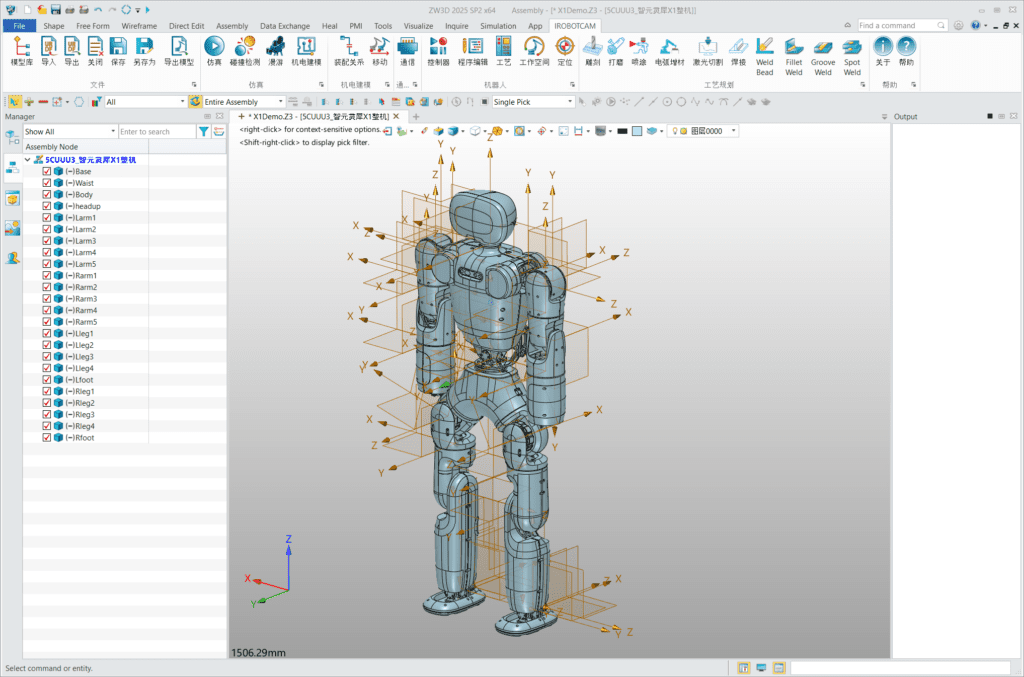
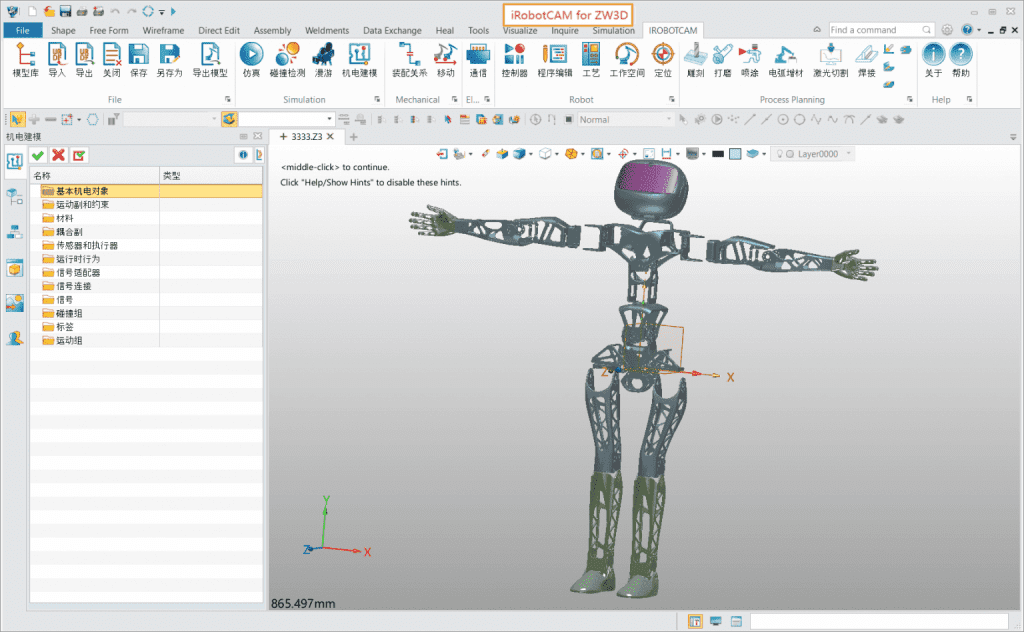
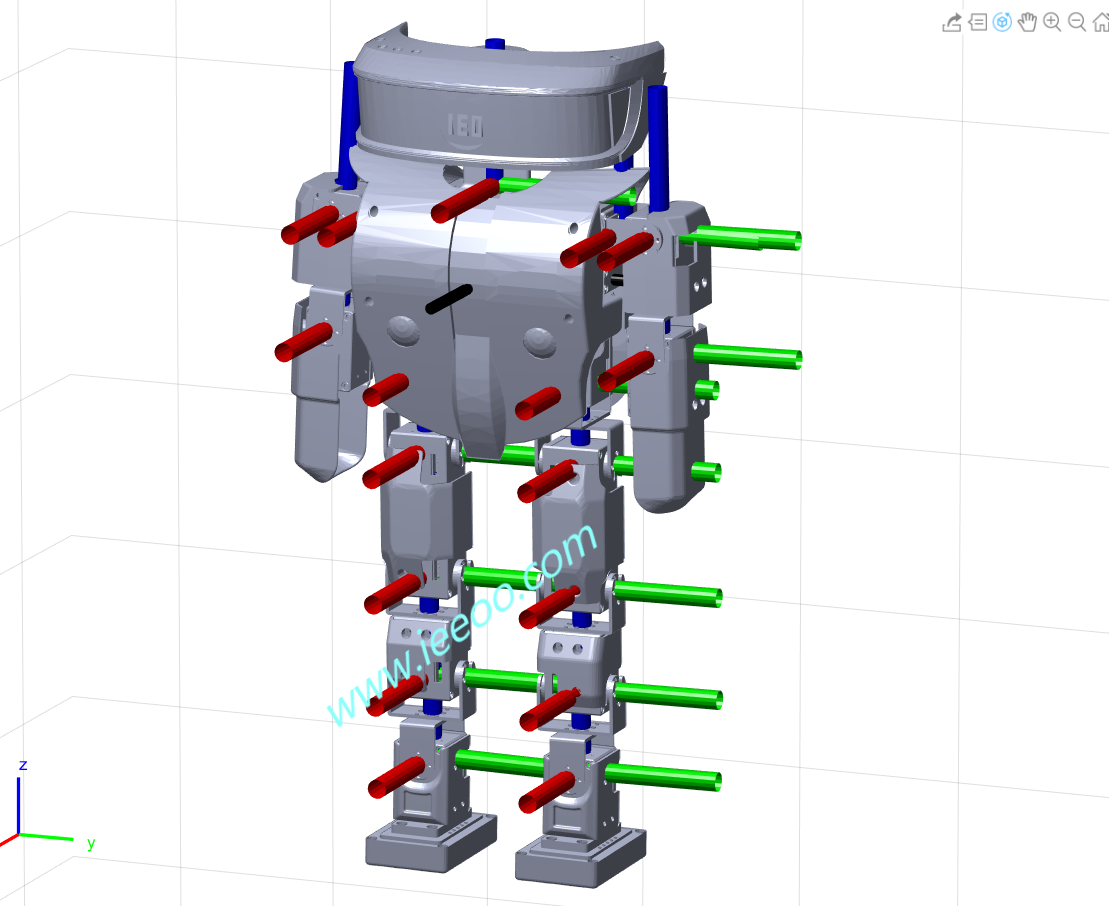
iRobotCAM 如何完成人形机器人的设计与URDF的输出,无缝对接MuJoCo仿真 - 越擎科技
ROS1云课→16机器人模型从urdf到xacro_51CTO博客_搭建ros机器人模型
案例应用-URDF导出, 机器人设计与Ros机器人仿真 - 越擎科技
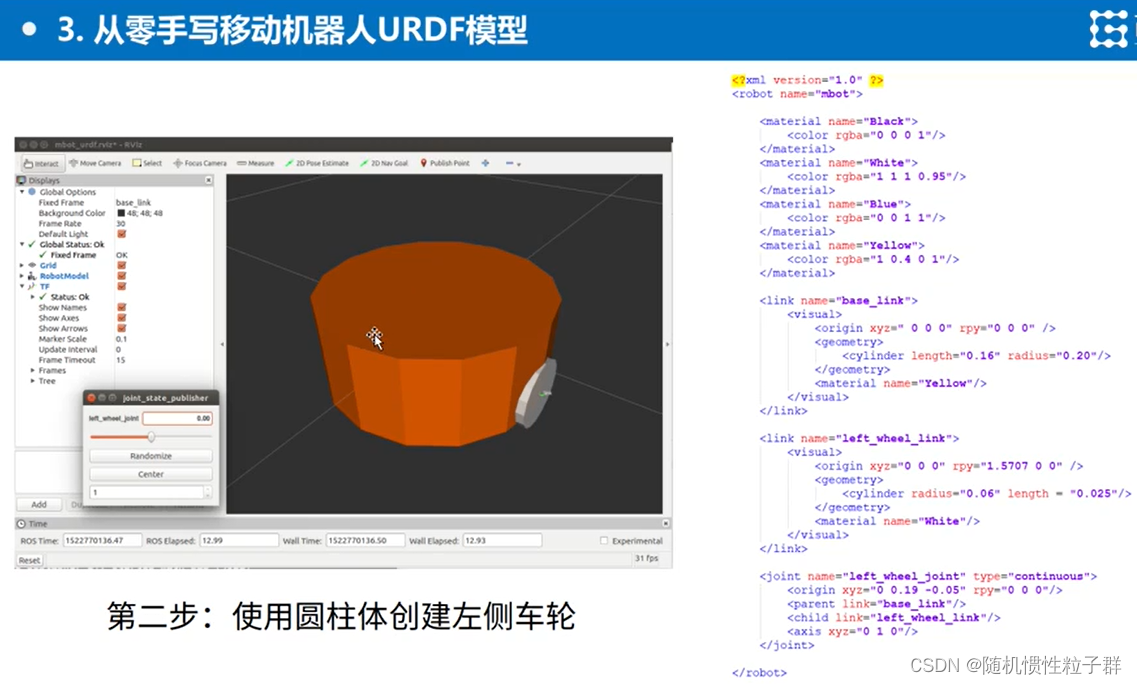
从零手写移动机器人URDF模型学习记录(一)_urdf material-CSDN博客
从0手写两轮差速机器人urdf模型_两轮差速模型-CSDN博客
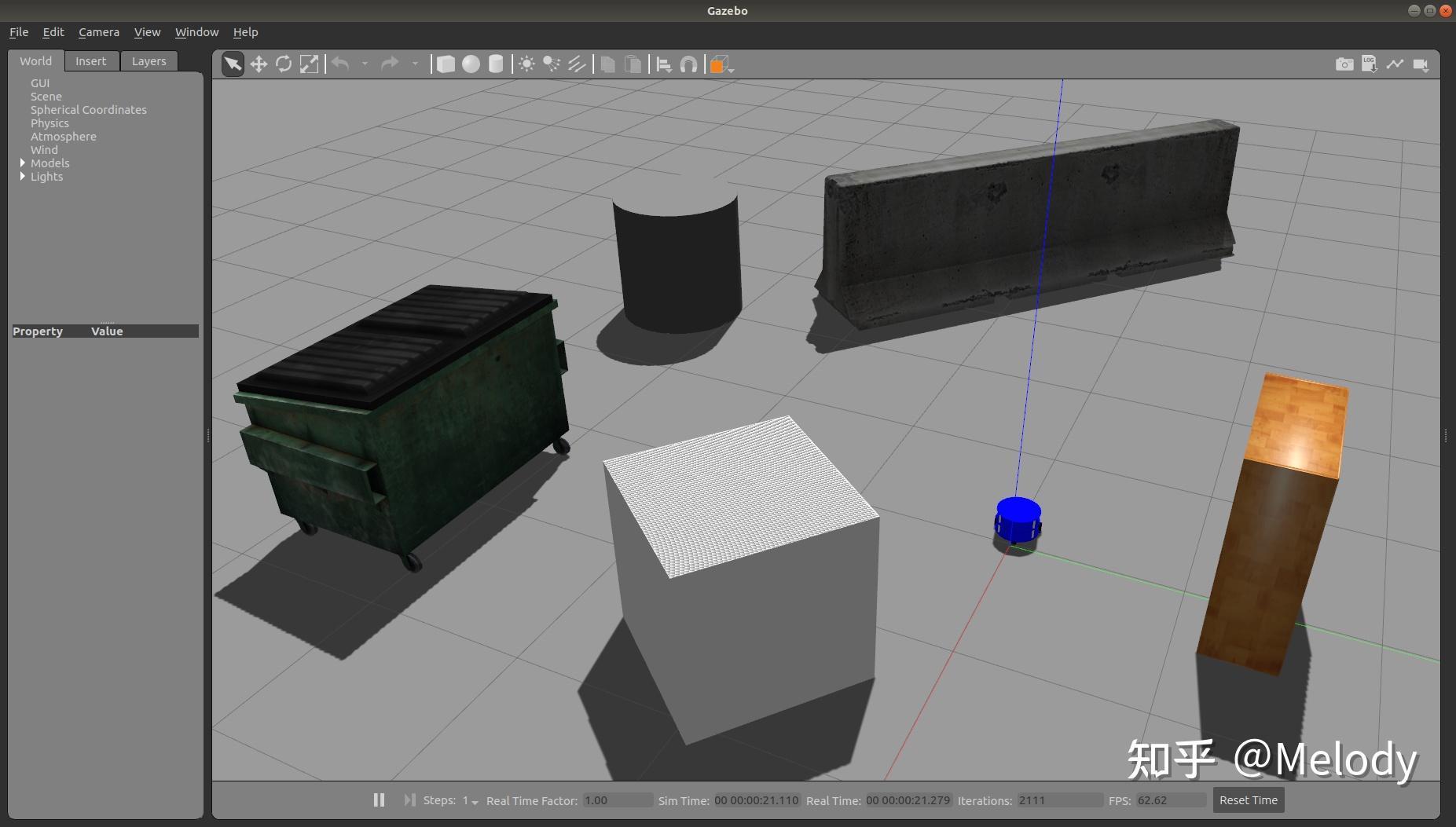
迷你无人车 Gazebo 仿真_gazebo仿真-CSDN博客
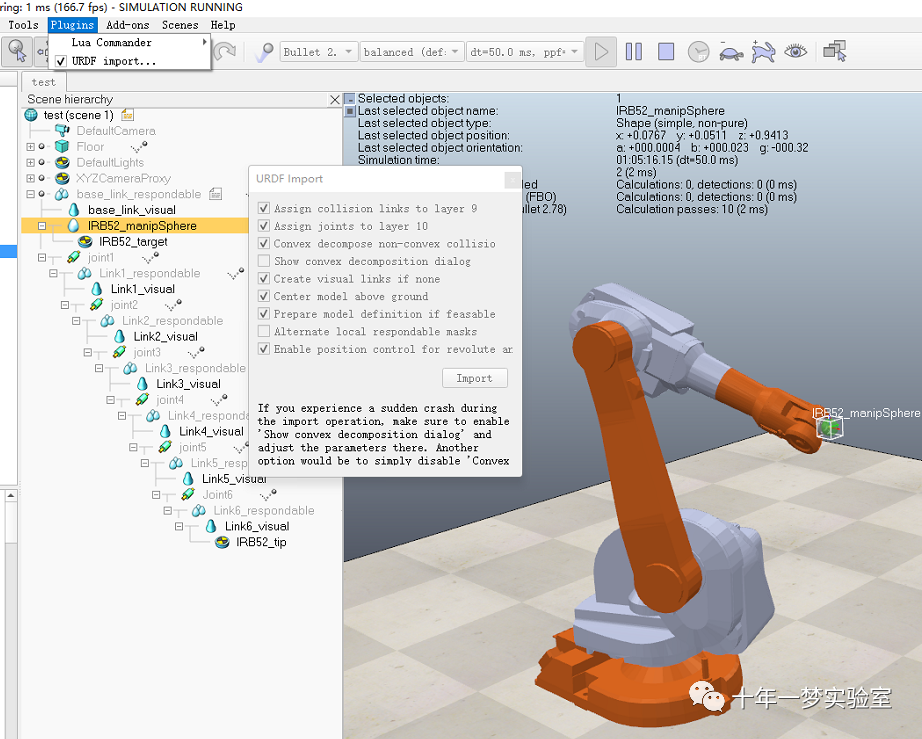
【ROS2】solidworks2021导出IRB52机器人的urdf,导入到coppeliasim和RViz2_abb机器人urdf-CSDN博客
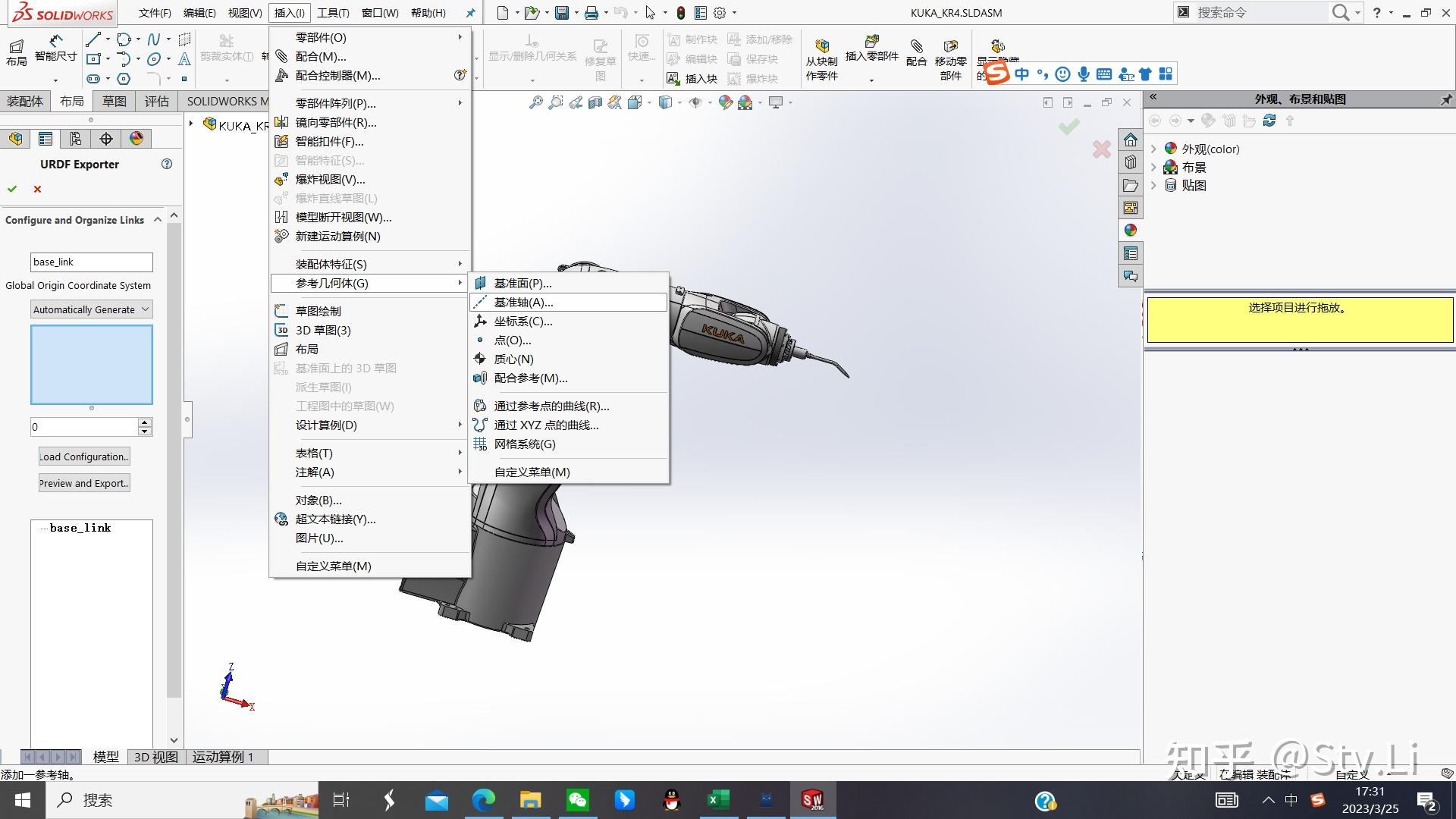
补充:一起来从Solidworks中导出机械臂的URDF模型_机械臂 solidworks转urdf-CSDN博客
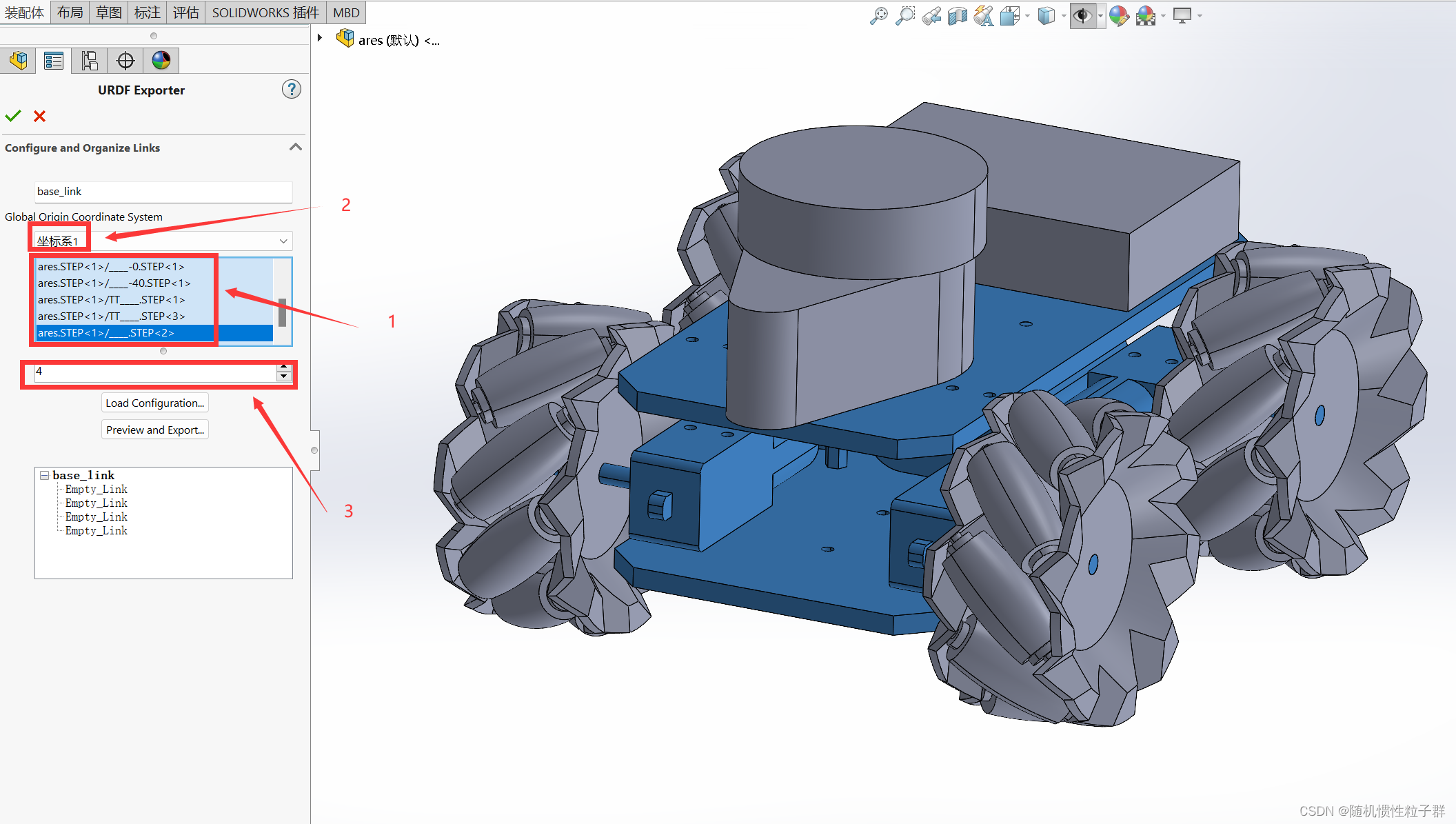
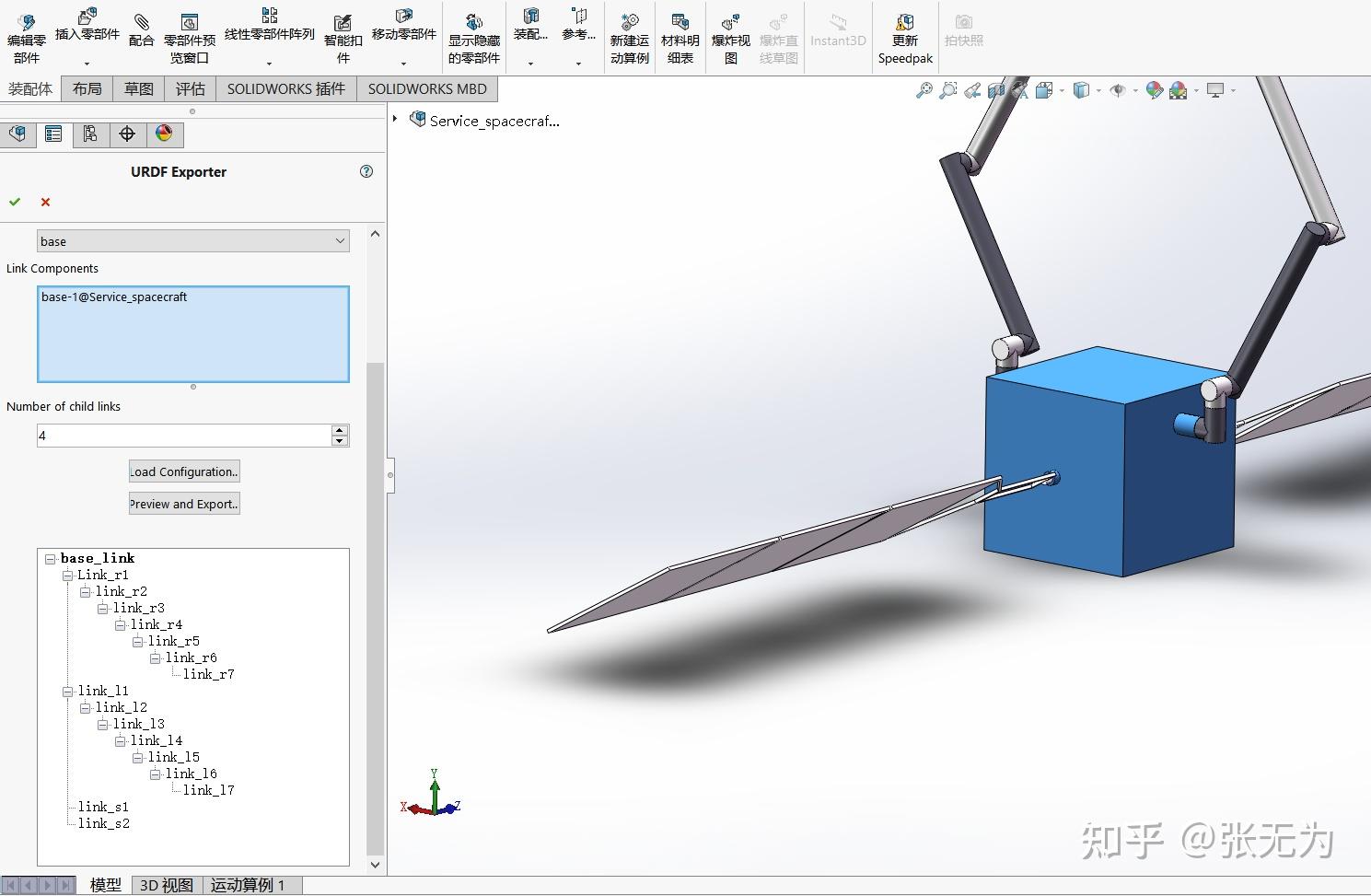
一起来从Solidworks中导出URDF模型_solidworks导出urdf-CSDN博客
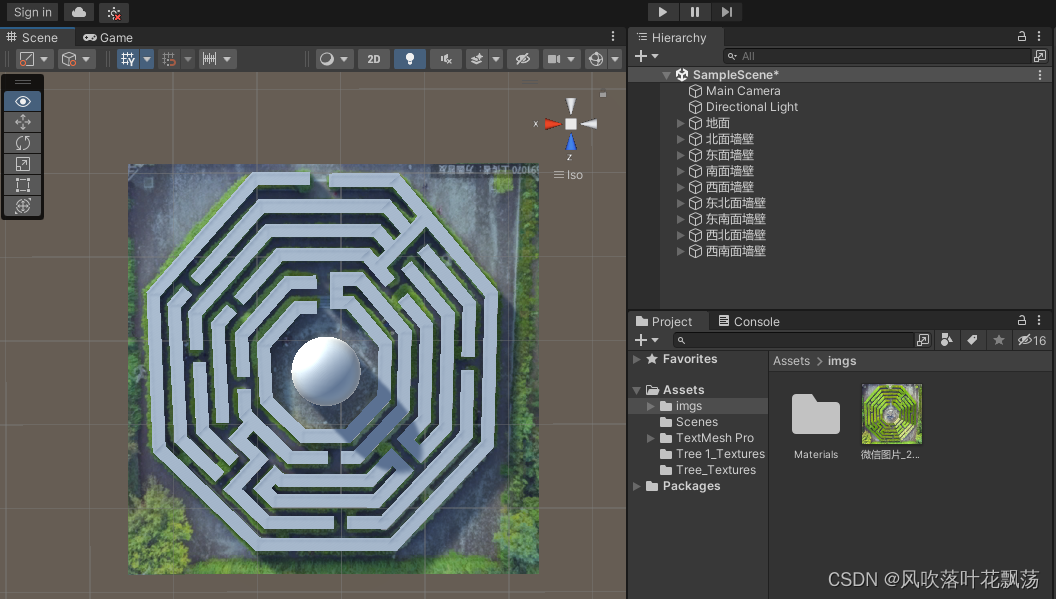
从零开始做一款Unity3D游戏<一>——亲自上手使用Unity_unity3d游戏开发-CSDN博客
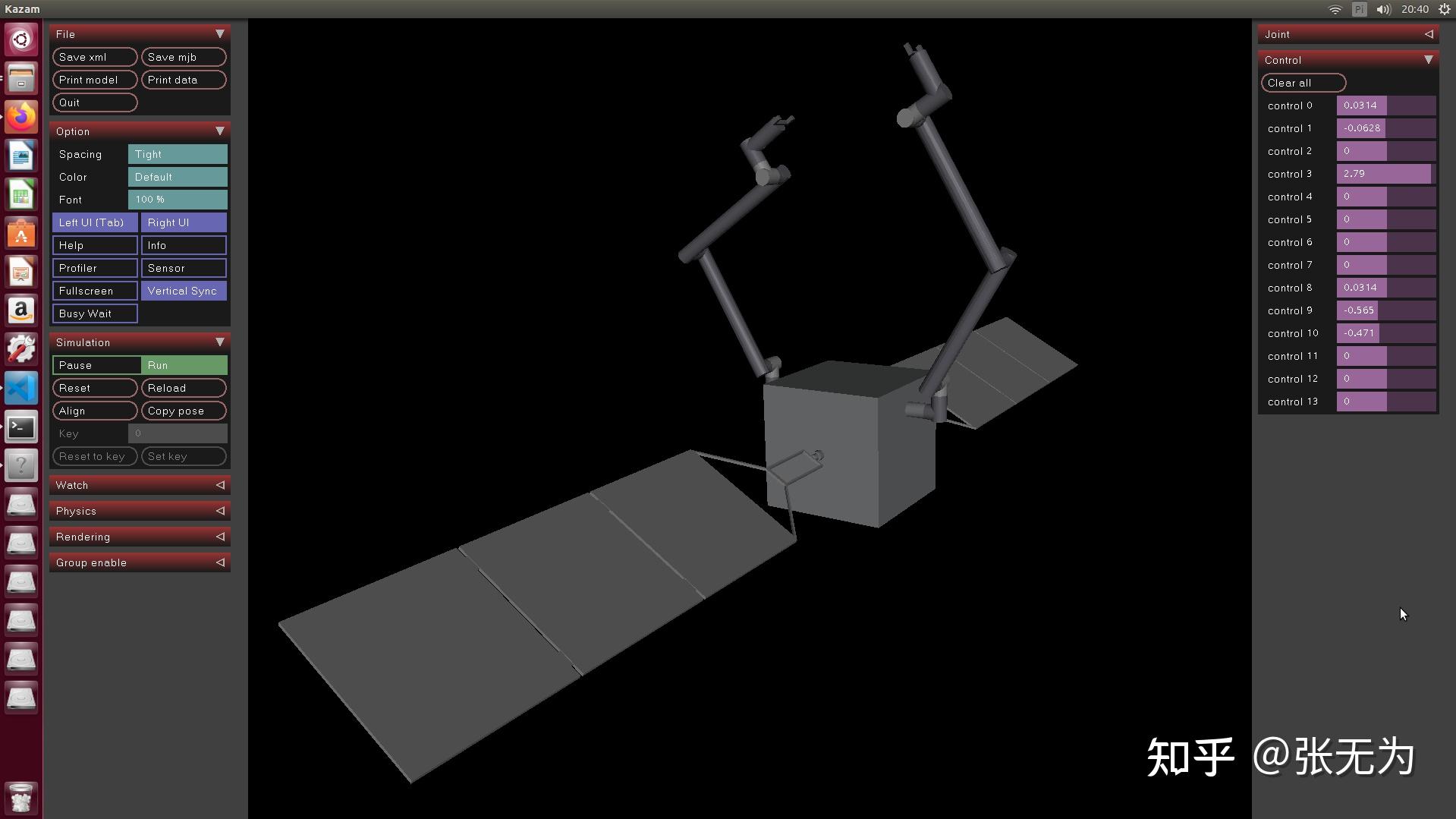
solidworks urdf mujoco 模型搭建过程 - 知乎
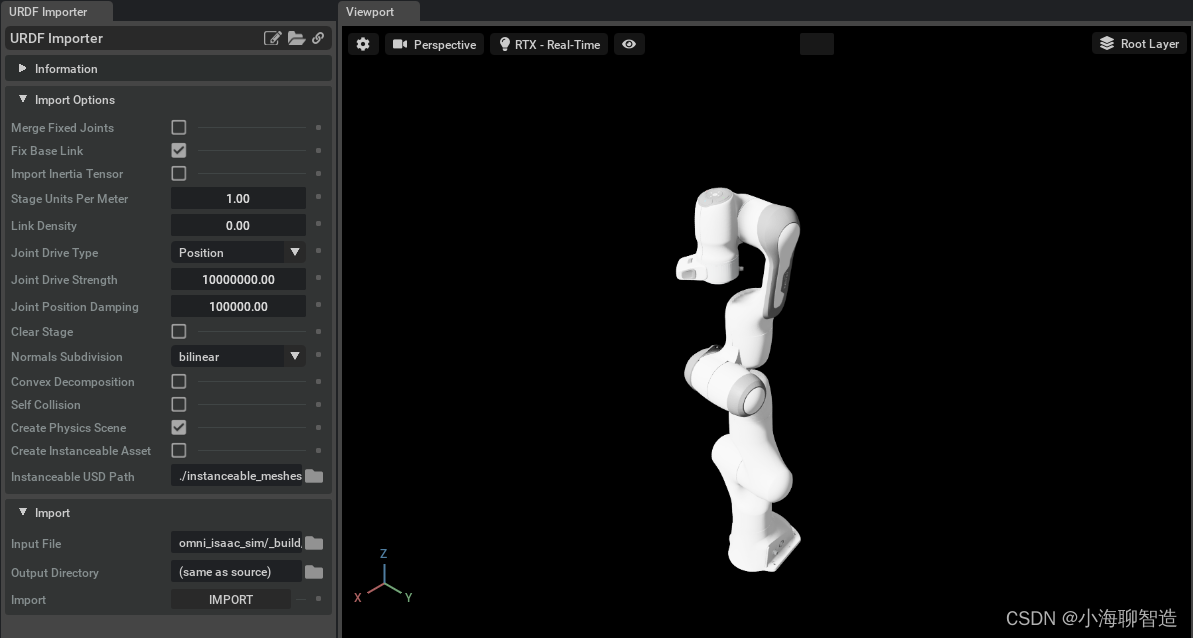
Isaac Sim 仿真机器人urdf文件导入_cassie urdf文件-CSDN博客
Solidworks模型转URDF模型文件_机器人urdf文件-CSDN博客
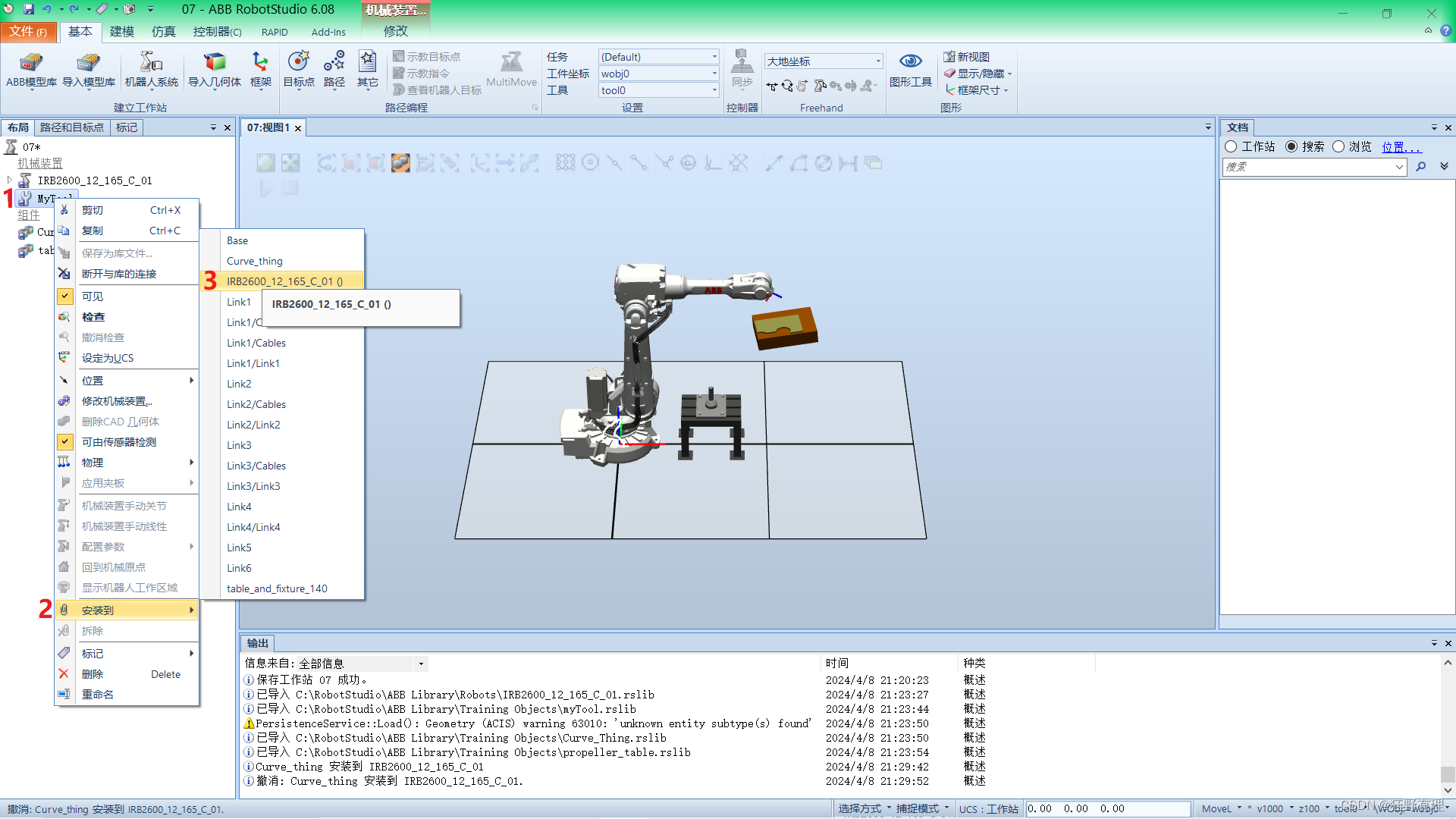
(项目示例)RobStudio机器人仿真软件操作-CSDN博客
发那科机器人仿真ROBOGUIDE导入模型 设置多坐标系导入工作站_roboguide如何导入机器人系统-CSDN博客
Ros机械臂仿真建模基础:URDF模型进化版本xacro模型文件语法详细讲解及如何从零构建一个机械臂模型(一) - 古月居
从零开始仿真ROS小车(一)urdf模型+rviz可视化_ros搭建小车rviz摄像头status黄标-CSDN博客
Unity Open Day 北京站-工业专场:Unity引擎打造3D互动式汽车智能座舱体验-CSDN博客
ROS Gazebo 仿真机器人 - 知乎
从零开始的unity3d入门教程(二)----基本功能讲解-CSDN博客
将Solidworks机器人模型导出为URDF模型_solidworks转urdf-CSDN博客
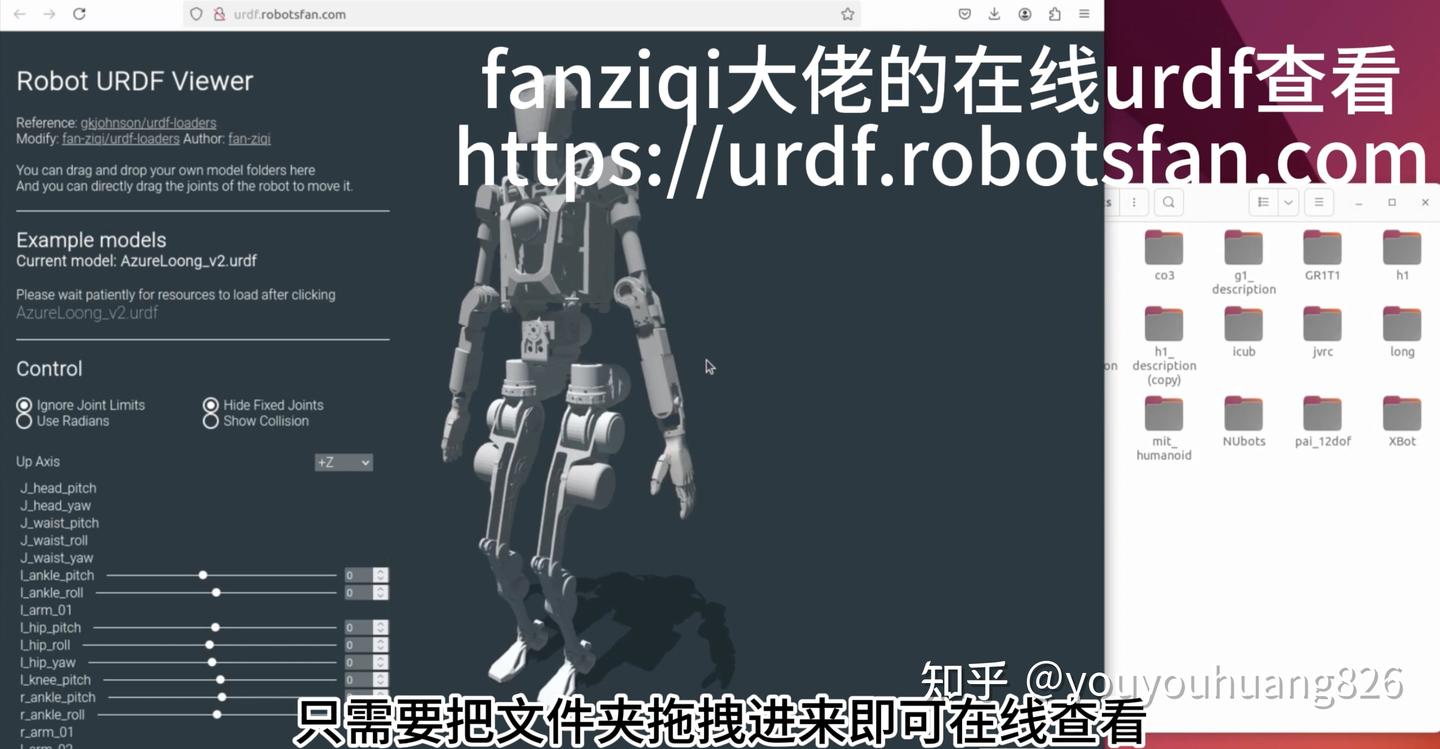
仿真实用工具之urdf,mjcf查看 - 知乎
URDF建模原理-CSDN博客
【ROS机械臂入门教程】_ros机械臂开发从入门到实战百度网盘-CSDN博客
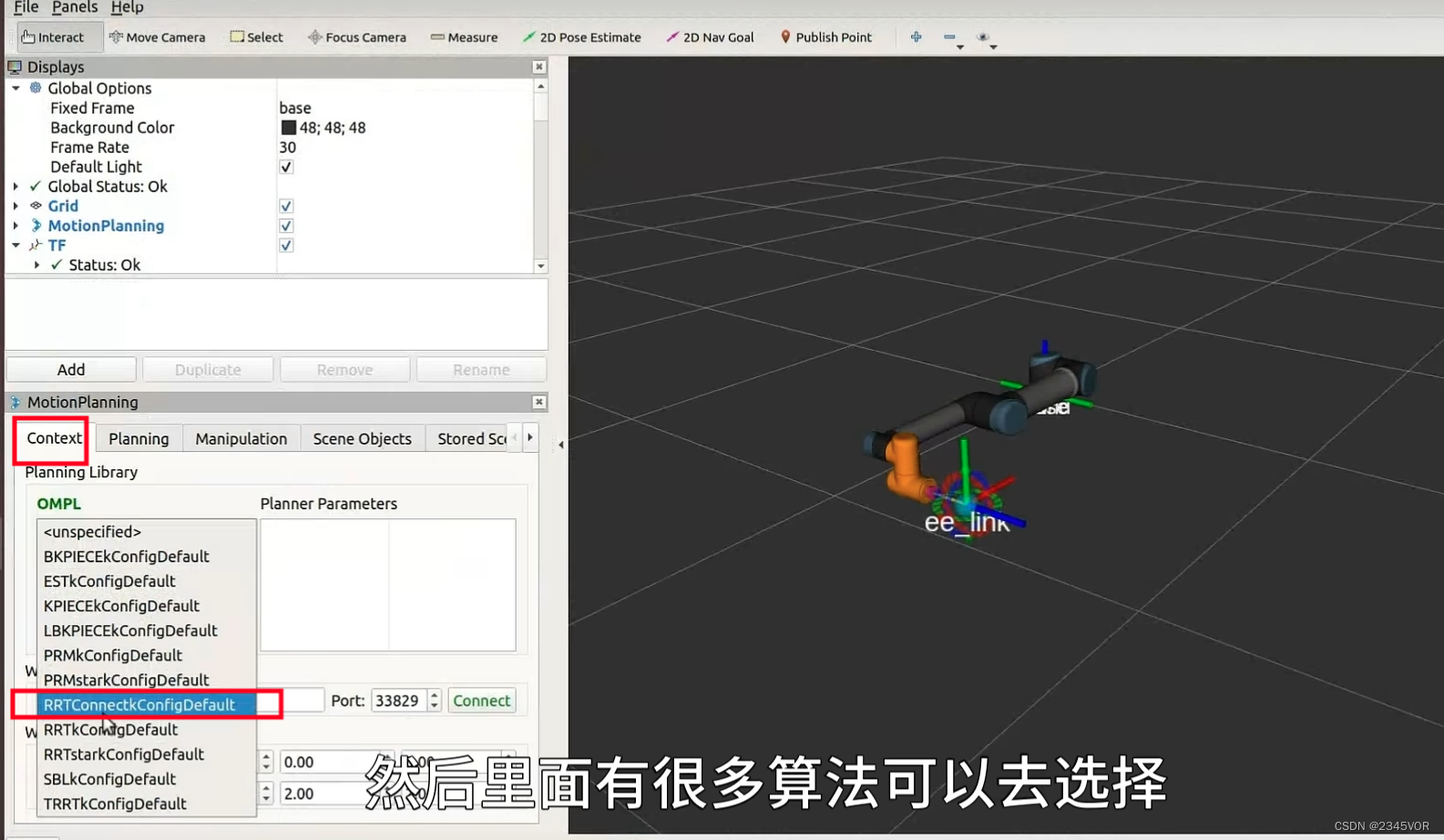
ROS机械臂小车建模+URDF编写+MoveIt+Gazebo仿真全攻略!机器人路径规划也能这么丝滑?-数码-淘宝好物网
Fusion360机械模型转URDF(ROS2)_fusion2urdf-CSDN博客
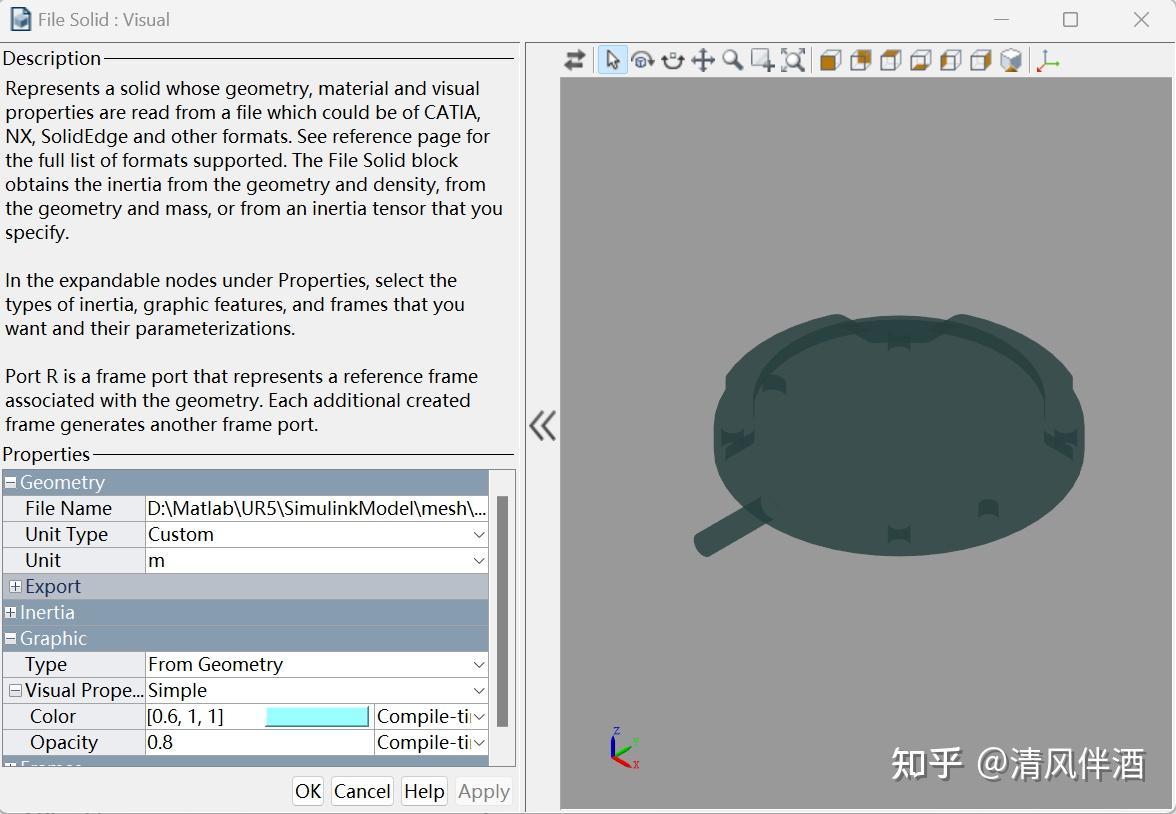
SolidWorks转.urdf格式机器人模型导入Matlab_如何将机器人的urdf文件导入到matlab中-CSDN博客
(项目示例)RobStudio机器人仿真软件操作_导入机器人(irb2600),创建系统(从布局创建),搭建工作台(桌子、轨迹板,使用三-CSDN博客
10、从零开始写URDF模型_创建urdf-CSDN博客
Unity3D游戏开发从零单排(五) - 导入CS模型到Unity3D_unity cs-CSDN博客
四足机器人研究(一)-V-rep宇树A1模型导入_unitree a1参数-CSDN博客
ROS#资讯汇总(ROS、C#、.NET和Unity3D)_c# ros-CSDN博客
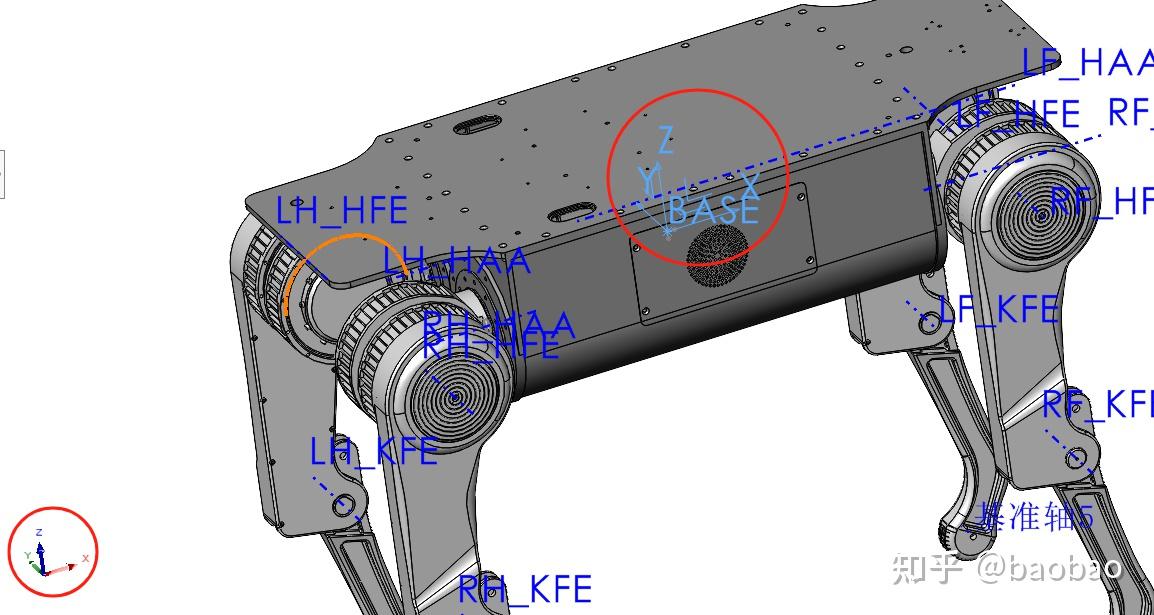
【机器人学习】四足机械狗(并联结构)urdf文件制作+simscape导入_urdf 并联结构-CSDN博客
ROS学习笔记---搭建自己的仿真机器人模型(URDF、xacro、Arbotix、rviz、ros_control & gazebo)_在 ...
ROS进阶:使用URDF和Xacro构建差速轮式机器人模型_51CTO博客_差速机器人运动模型
【ROS】URDF集成Gazebo-CSDN博客
从零实现机器臂仿真(UR5+Gazebo)_51CTO博客_ur5机械臂仿真
Solidworks生成urdf模型并使用ROS+moveit!对机械臂仿真_sw机械臂模型建立-CSDN博客
机器人仿真-gazebo学习笔记(3)URDF和机器人模型_urdf文件-CSDN博客
机器人系统仿真(URDF) - 古月居
iRobotCAM 如何完成人形机器人的设计与URDF的输出,无缝对接MuJoCo仿真 - 知乎
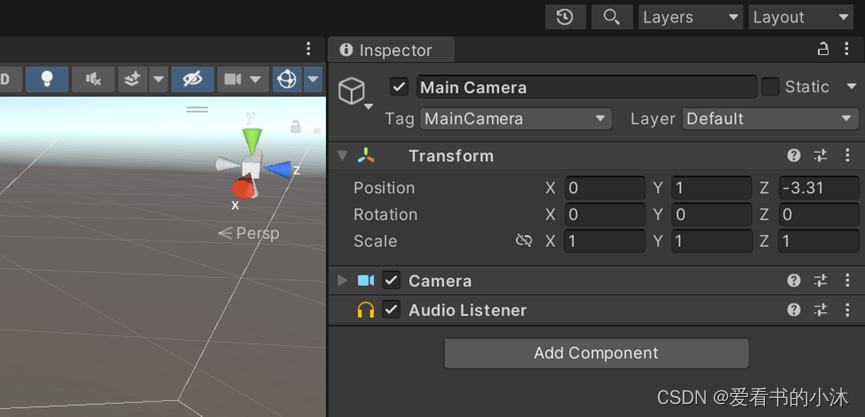
(一)从零搭建unity3d机械臂仿真-unity3d导入urdf模型
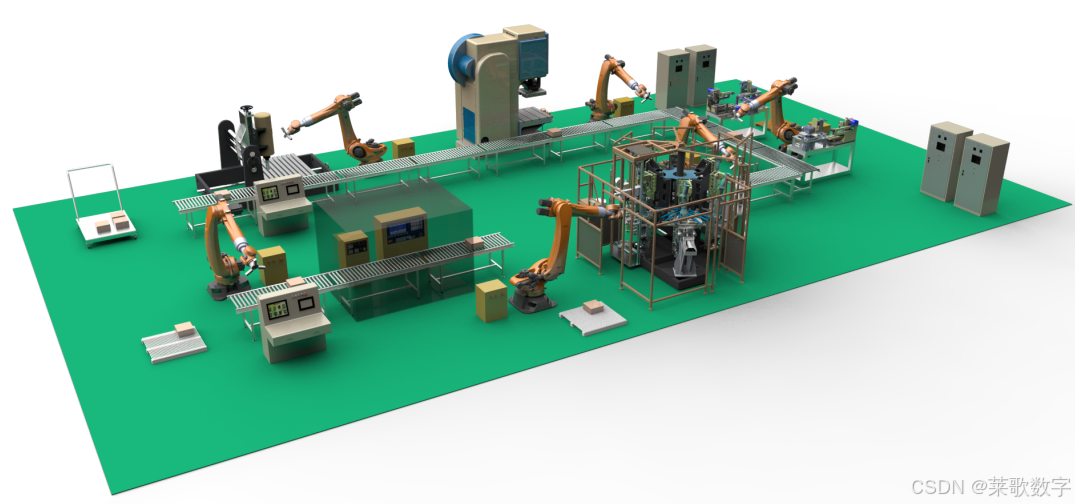
unity3d 开发机器人加工流程虚实同步的数字孪生系统_机器人虚实同步-CSDN博客
ADAMS&Simulink 机器人动力学仿真入门(一):使用Solidworks创建三维模型并导入ADAMS(代码已开源)_adams ...
机器人URDF模型
【ROS2】机器人建模与仿真(1)——建模入门(URDF+rviz2)-CSDN博客
强化学习训练机器人2 Unity3D环境_unity 四足机器人-CSDN博客
ROS进阶(二):移动机器人项目实战 - 知乎
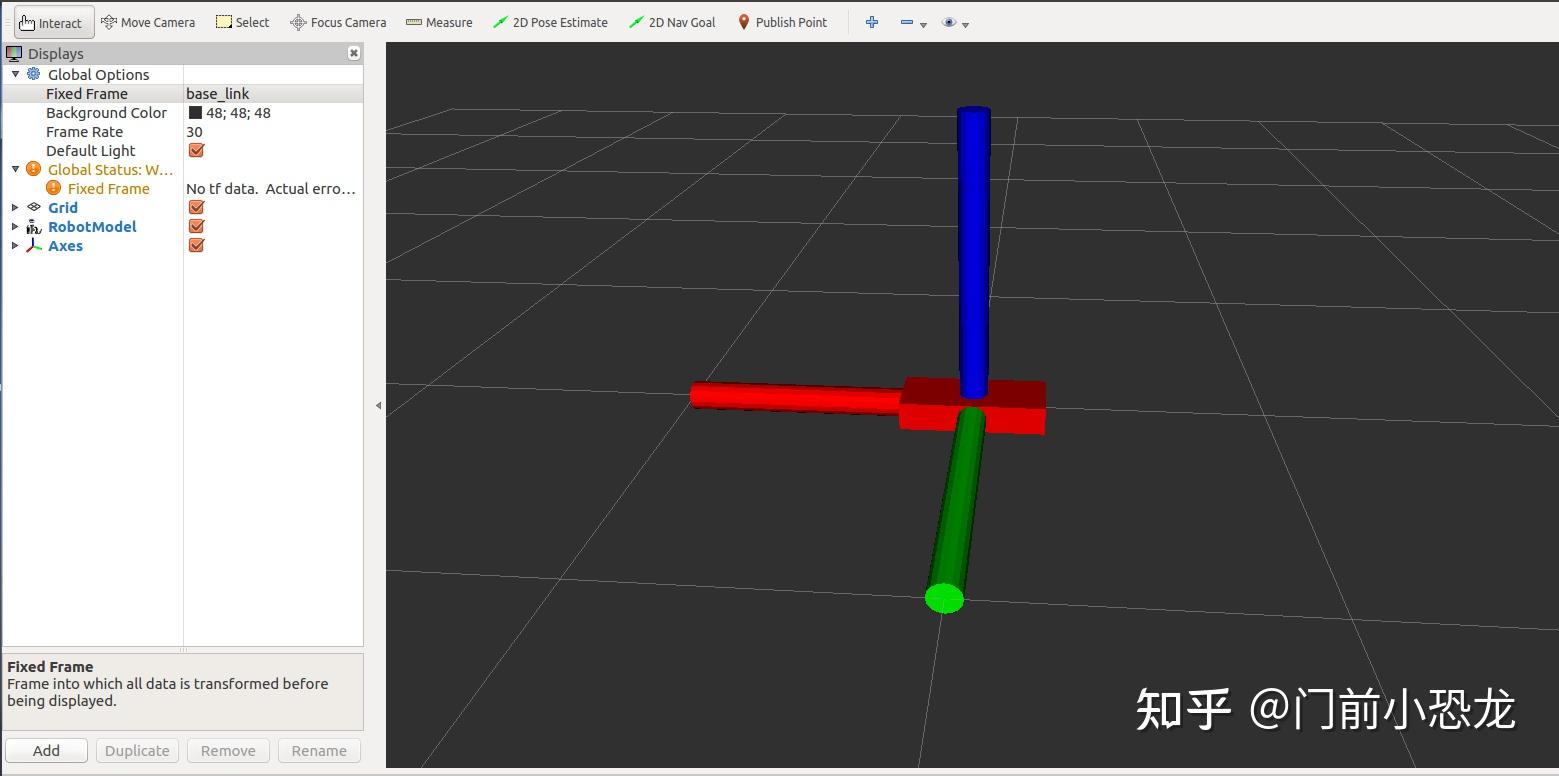
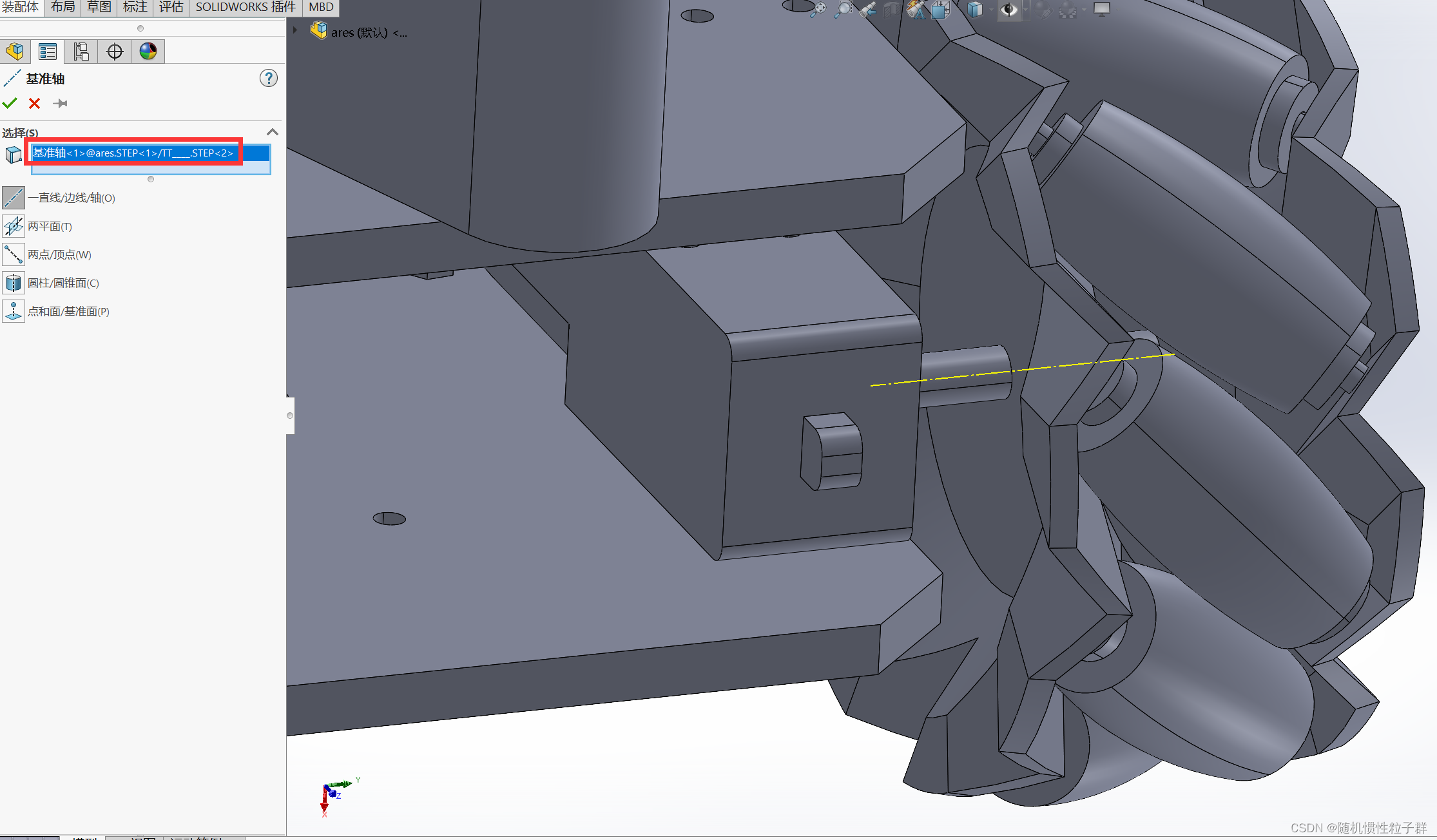
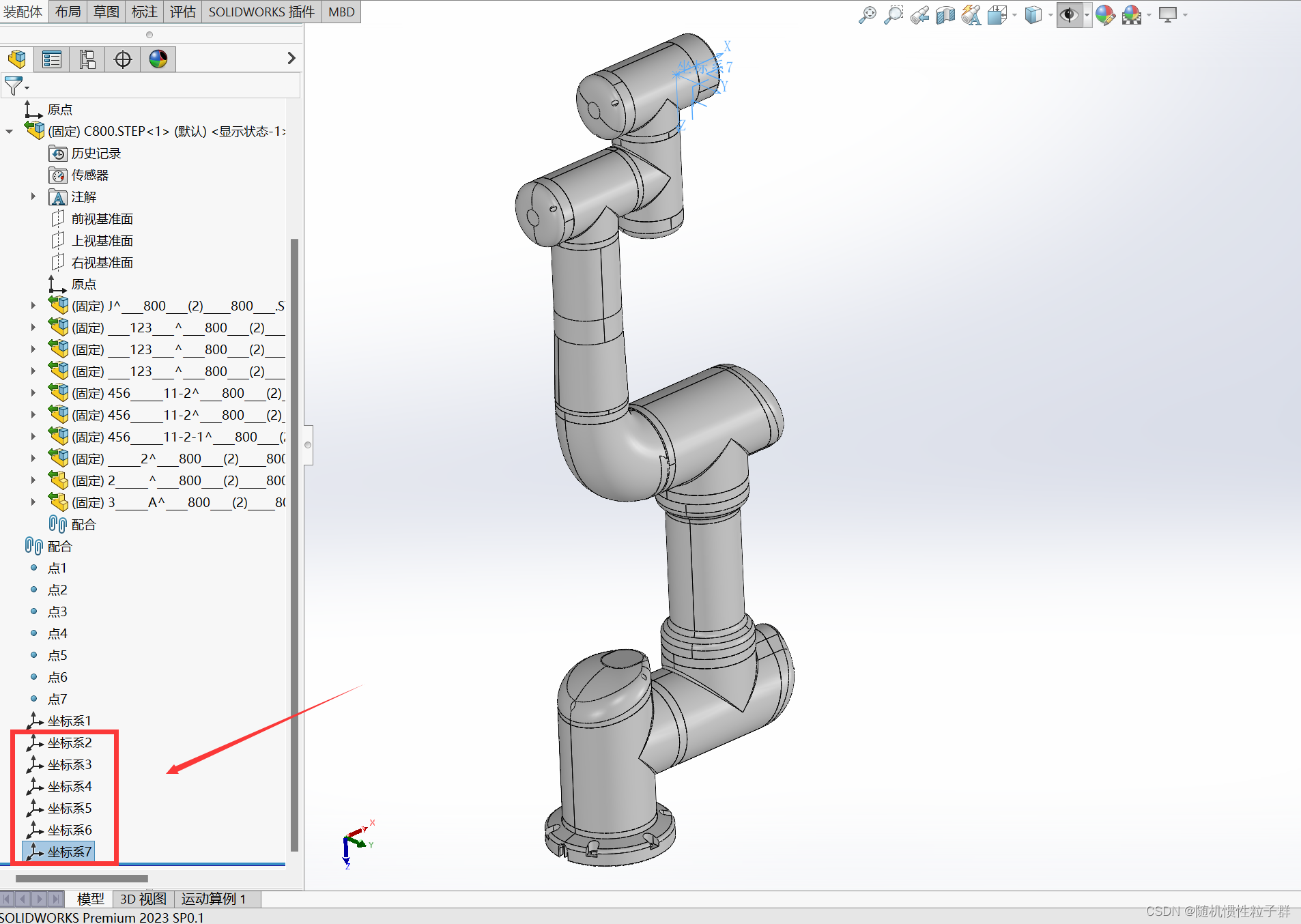
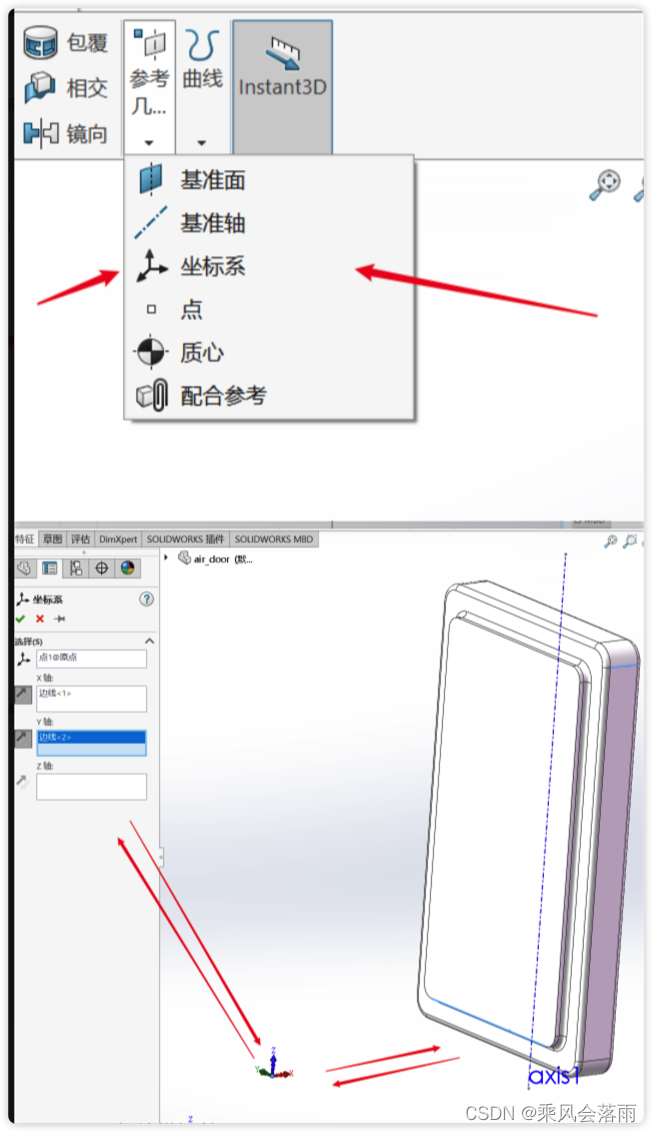
构造3D机器人模型的参考坐标系、基准轴、点和urdf文件<三>_urdf怎么设置机器人坐标-CSDN博客
URDF模型验证(Unity篇) - 知乎
Matlab - Solidworks 机器人建模(3)如何把URDF文件导入到Matlab_urdf导入到simulink-CSDN博客
机器人系统仿真(一)——URDF集成Rviz基本流程_51CTO博客_urdf机器人模型
【小沐学Unity3d】Unity3d导入3D模型-CSDN博客
【学习笔记】ROS2纯小白 - MoveIt! (humble) 引入新的机器人模型 - 知乎
一、向Simulink中导入UR5模型 - 知乎
复杂的机器人模型 Fusion360 转 URDF - 知乎
Ros - URDF- 三位模型导出 - lvdongjie-avatarx - 博客园
如何创建一个标准的URDF模型,并导入进mujoco、vrep(coppeliaSim)和webots使用(1) - 知乎
Solidworks机器人导出URDF文件,导入Webots并控制_solidworks urdf-CSDN博客
机器人操作系统ROS
Arduino白泽四足机器人——matlab逆运动学求解_mb6376218bdd5cf的技术博客_51CTO博客
波士顿大狗运动仿真-Unity3D_unity机器人仿真-CSDN博客
机器人控制算法三之urdf模型文件编写及rviz仿真可视化_urdf加载 c++-CSDN博客
珞石机械臂ROKAE实战1:URDF文件导入ROS1_珞石机械臂urdf-CSDN博客
ros机器人仿真-CSDN博客
3D SLAM Gazebo仿真_slam gazebo仿真环境-CSDN博客
11.机器人系统仿真搭建gazebo环境、仿真深度相机、雷达、RGB相机_gazebo仿真环境搭建-CSDN博客
gazebo仿真跑VINS-Fusion双目视觉惯性SLAM_vins gezebo联合仿真-CSDN博客
Ubuntu安装PyBullet | PyBullet 导入Ur5 | PyBullet简单使用 | 关于机械臂强化学习仿真引擎的选择 ...
【机器人基础】【装卸臂项目】【Simscape】Simulink导入机器人URDF文件及Simscape操作解析-CSDN博客
Gazebo仿真学习——1.自定义URDF以使机器人在Gazebo中工作_gazobo 导入自定义urdf-CSDN博客
Rviz中如何导入自定义障碍物 | 从建模到导出urdf到导入rviz | Ros中如何导入障碍物 | sw2urdf的下载和使用 ...
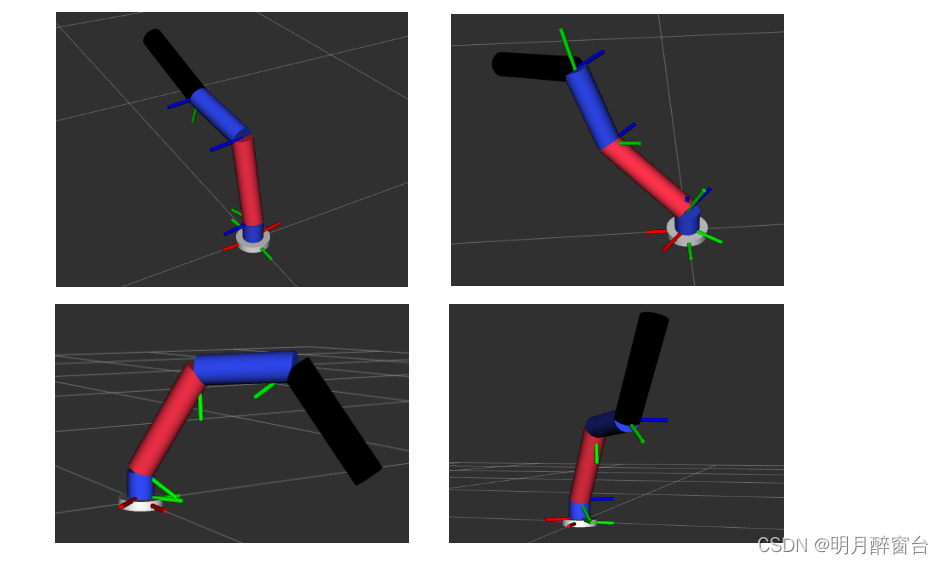
Based on this image's title: “(一)从零搭建unity3d机器人仿真:unity3d导入urdf模型_urdf导入unity-CSDN博客”