Showing 120 of 120on this page. Filters & sort apply to loaded results; URL updates for sharing.120 of 120 on this page
New Paper Published on IJRR | Autonomous and Intelligent Robotics ...
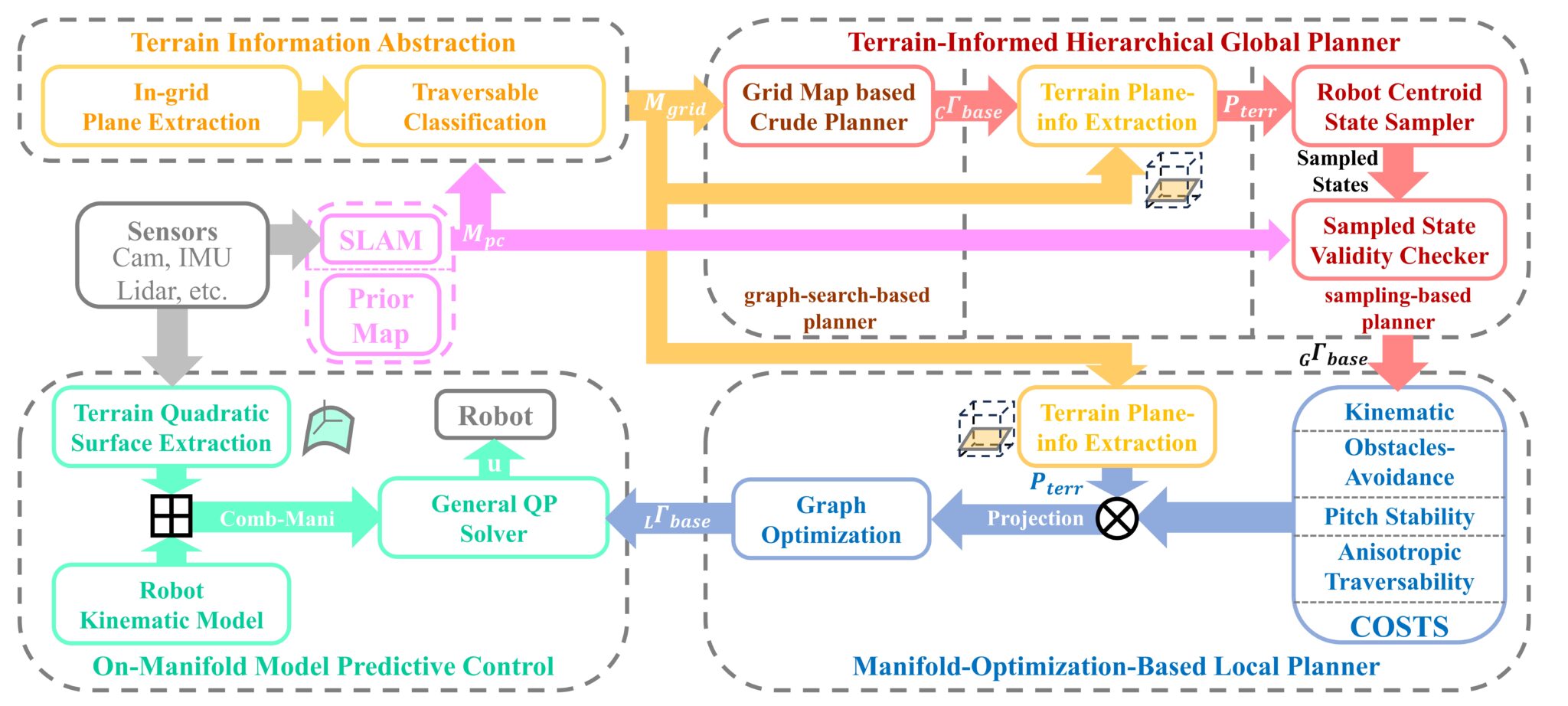
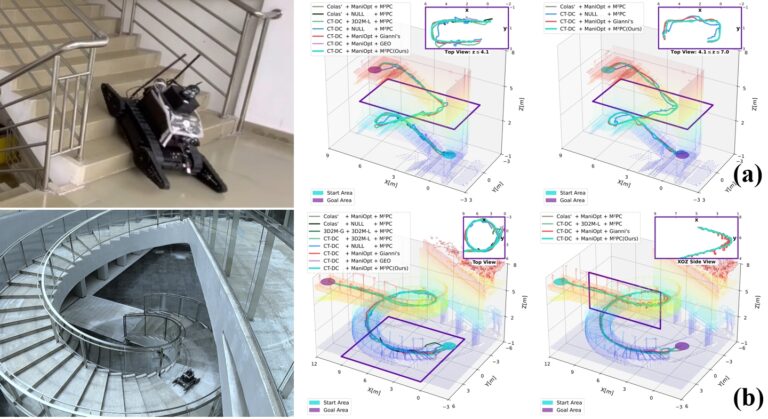
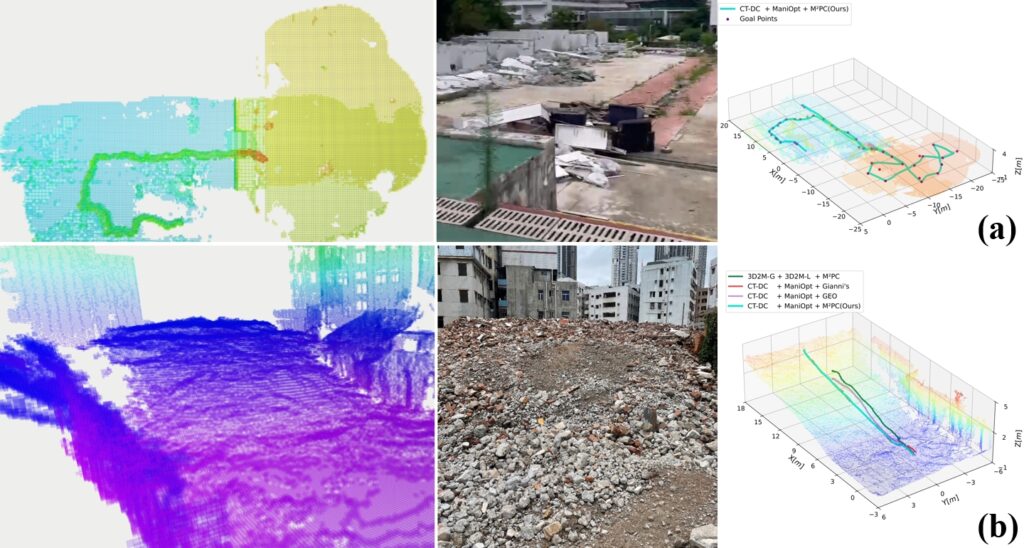
IJRR 2025: TiFA: A Terrain-informed Navigation Framework for ...
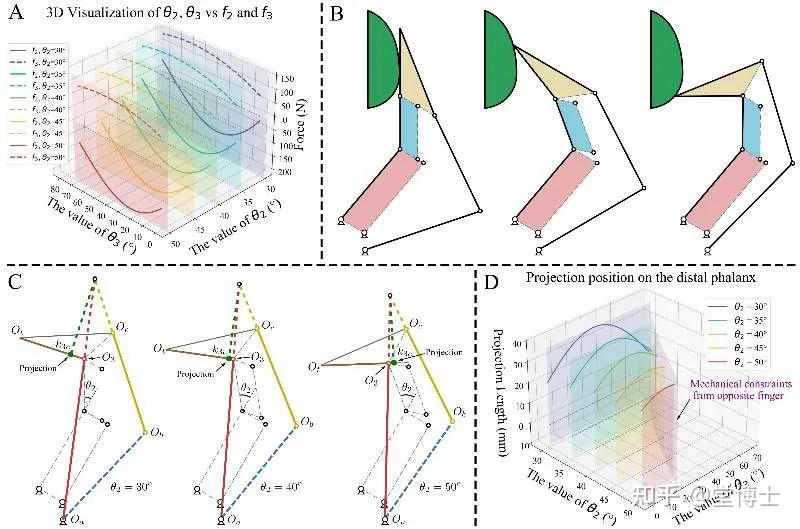
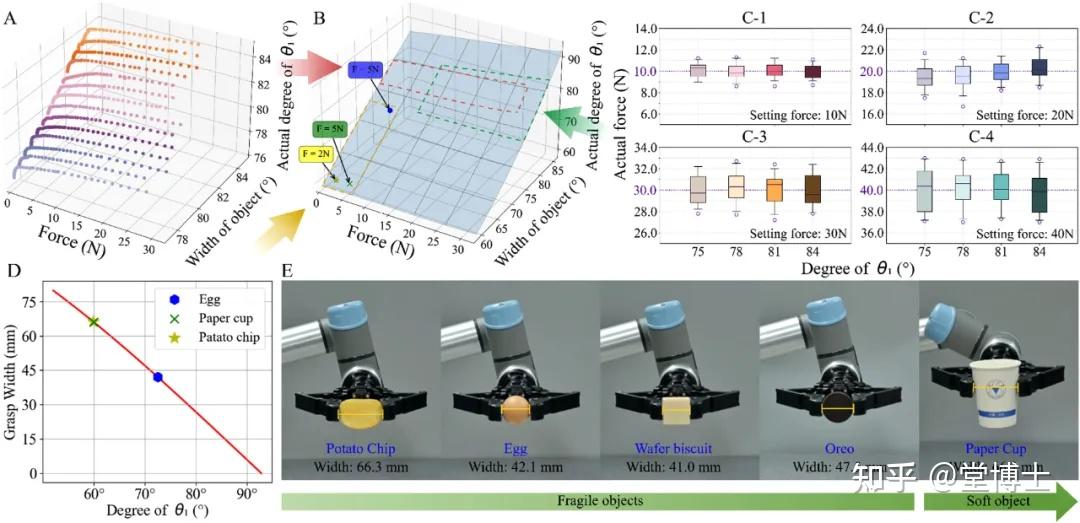
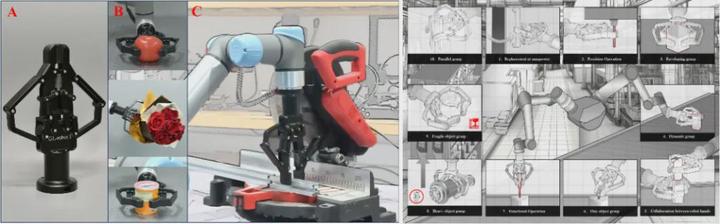
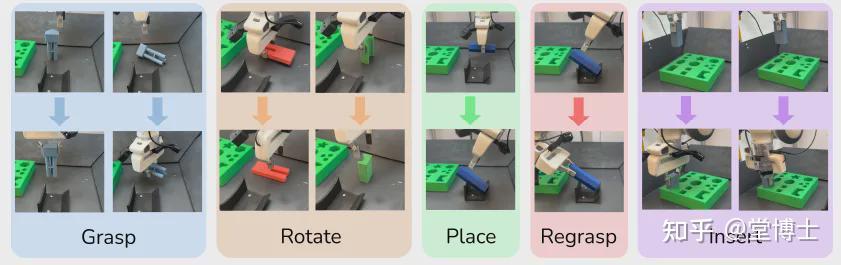
IJRR 重磅,浙江大学机械工程学院Grasp Lab用AI 赋能机械革新:机器人抓取的新突破 - 知乎
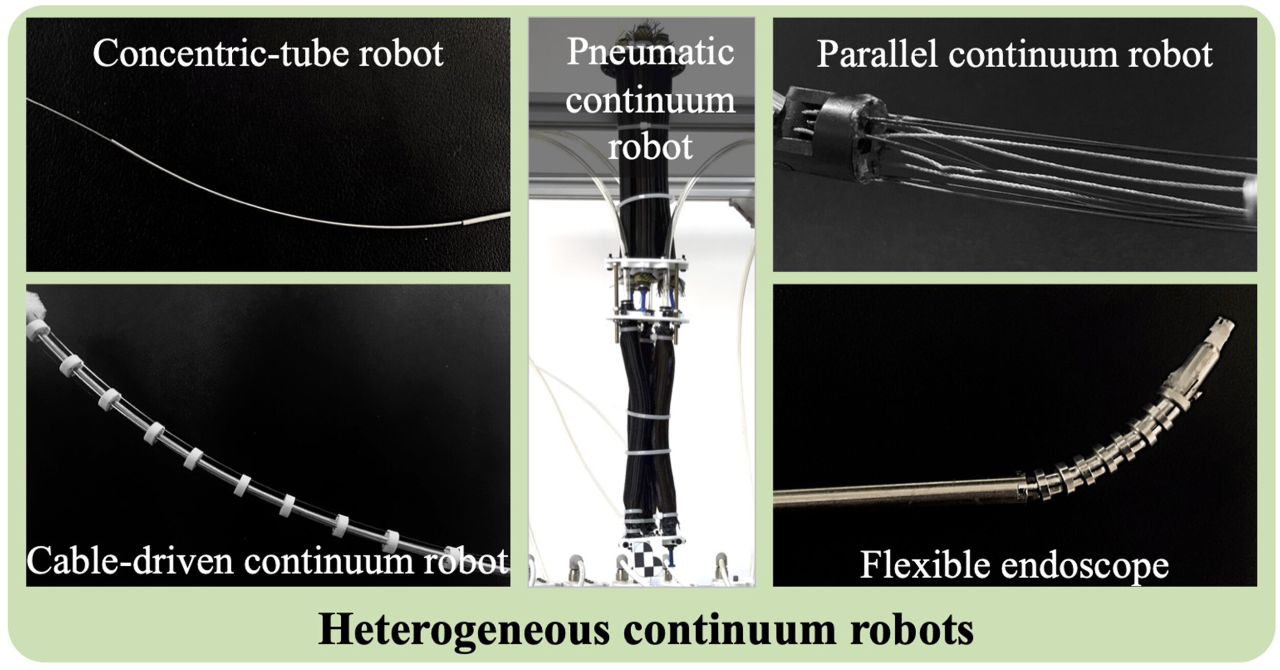
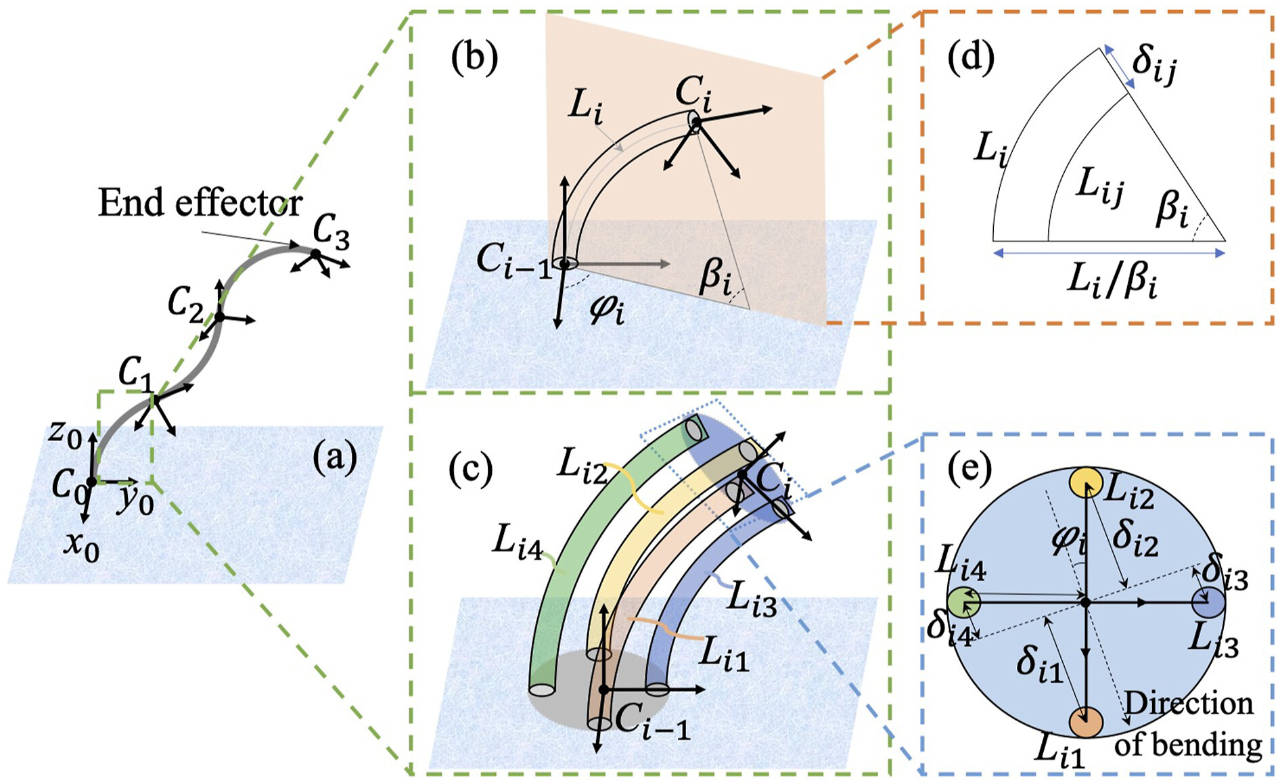
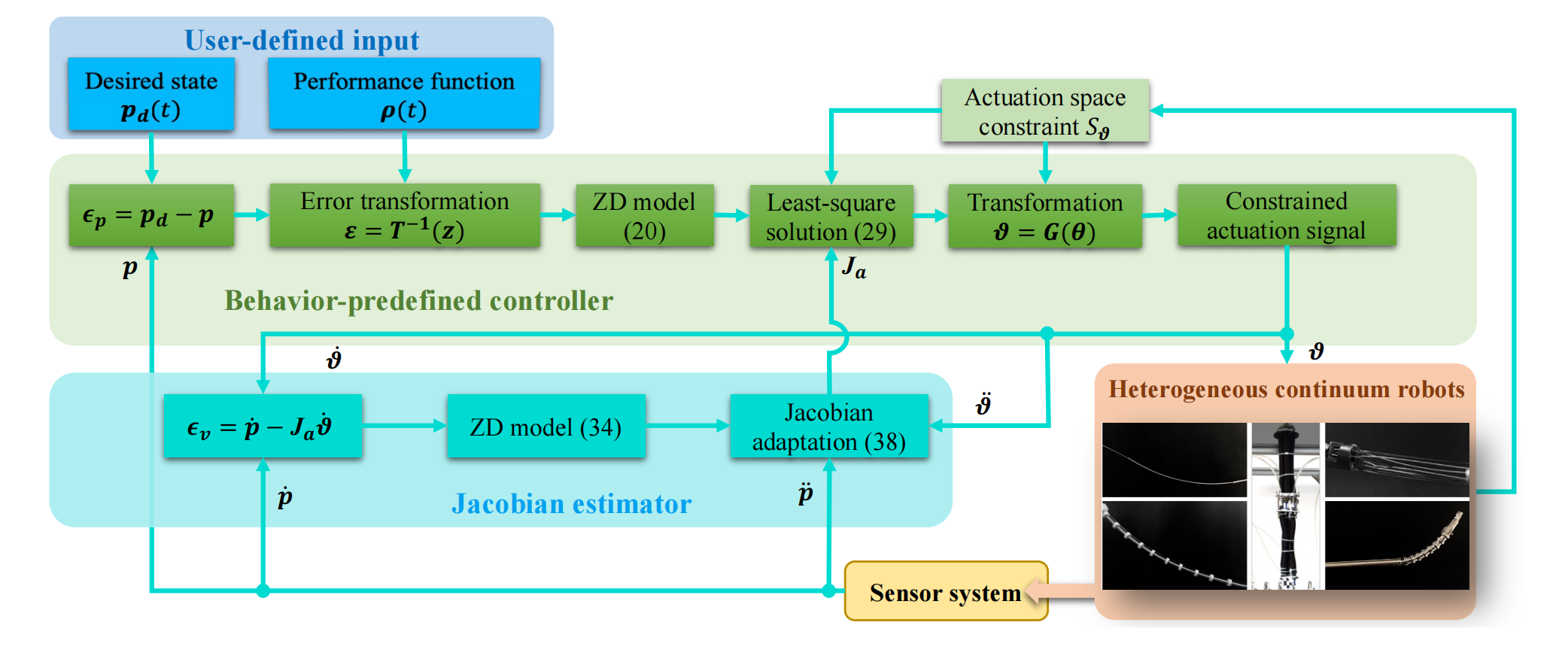
IJRR | Behavior-predefined adaptive control for heterogeneous continuum ...
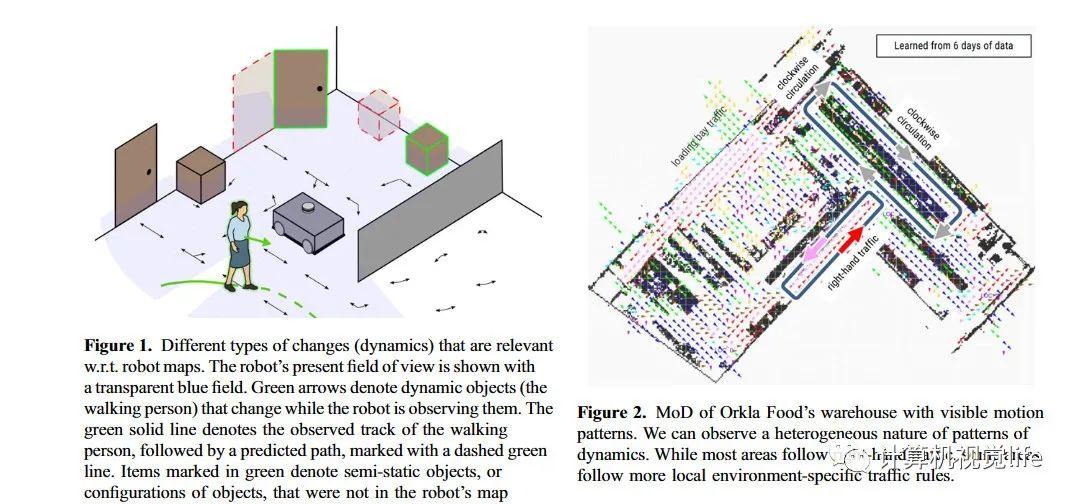
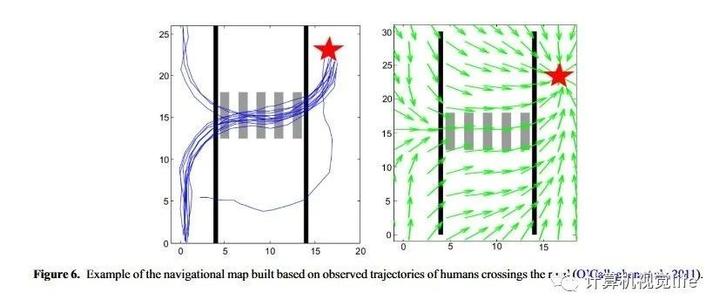
IJRR 2023|移动机器人动力学地图研究综述 - 知乎
Our institute's latest research results were published in IJRR as the ...
IJRR 连续体机器人预设行为自适应控制(BPAC)框架-度量科技 | NOKOV度量动作捕捉
(PDF) IJRR Vol. 9; Issue 5; May 2022
The International Journal of Robotics Research: Sage Journals
The International Journal of Robotics Research (IJRR)Issue 12 论文概述 - 知乎
Publications - Spatial AI & Robotics Lab
International Journal of Robotics Research怎么样
International Journal of Robotics Research - Impact Factor | S-Logix
Publications - International Foundation of Robotics Research
I am thrilled to join the editorial board of the International Journal ...
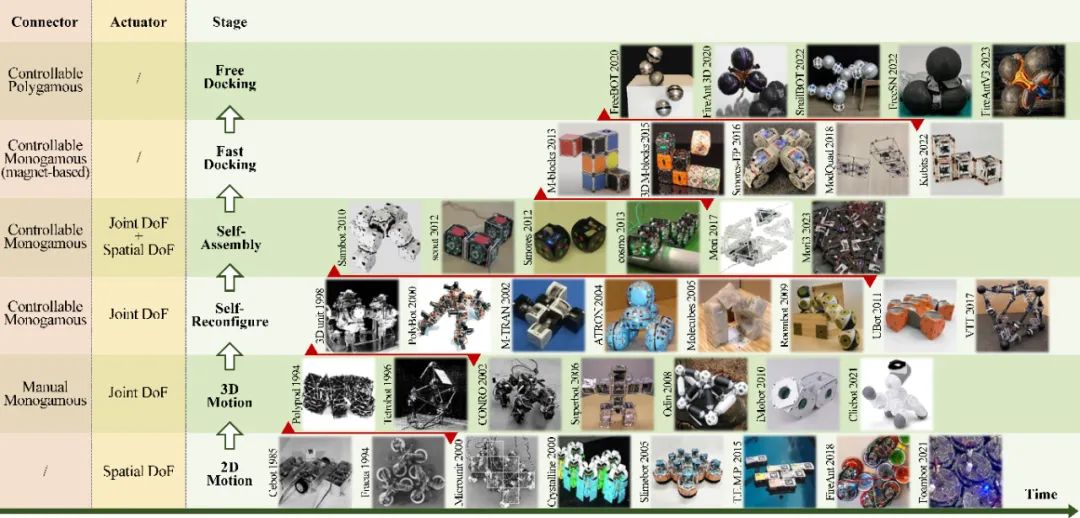
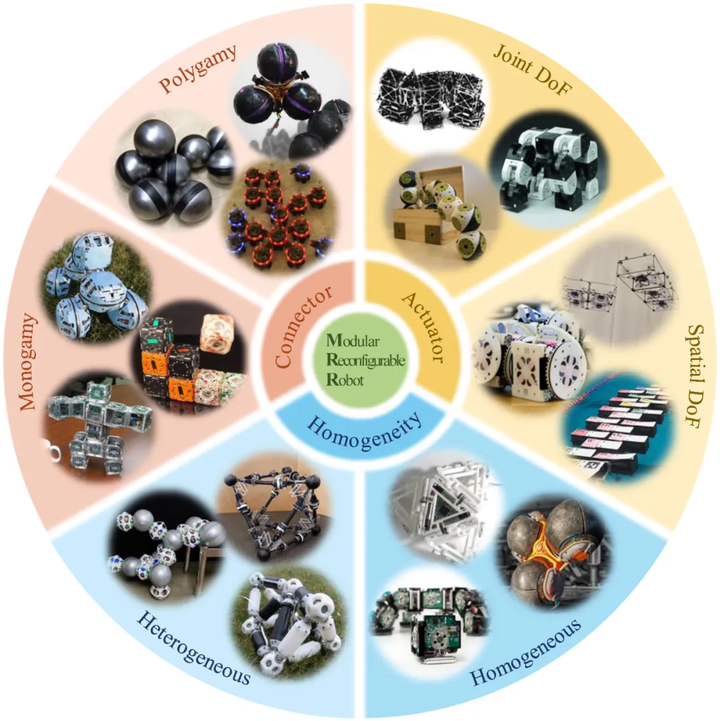
变形通用机器人? IJRR顶刊深度解析模块化自重构机器人前世今生 - 机器人大讲堂
PPT - The MIT Years: Highlights PowerPoint Presentation, free download ...
W. Chen Robotics
我院最新研究成果以第一单位发表IJRR | 中山大学计算机学院
机器人研究领域顶级期刊介绍-移动机器人运动规划和控制篇 - 知乎
北京大学谢广明教授团队最新IJRR研究成果:在黑暗浑浊水域“看见”世界,首次提出基于电感知的水下SLAM新方法_北京大学先进制造与机器人学院
Publications
Journal Of Robotics-机器人学杂志-首页
变形通用机器人? IJRR顶刊深度解析模块化自重构机器人前世今生_腾讯新闻
Exploring Leading Robotics Journals for Innovation
机器人领域新突破!顶刊《IJRR》近期重磅论文概述 - 知乎
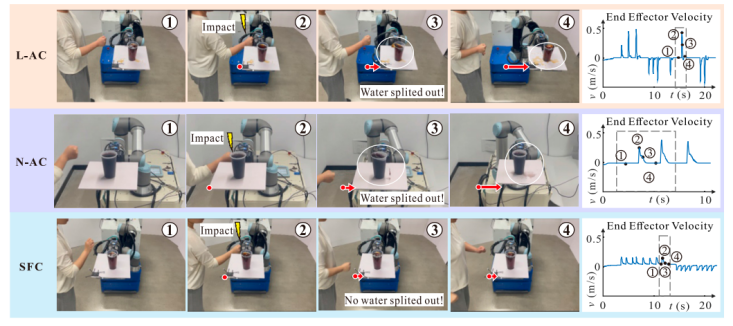
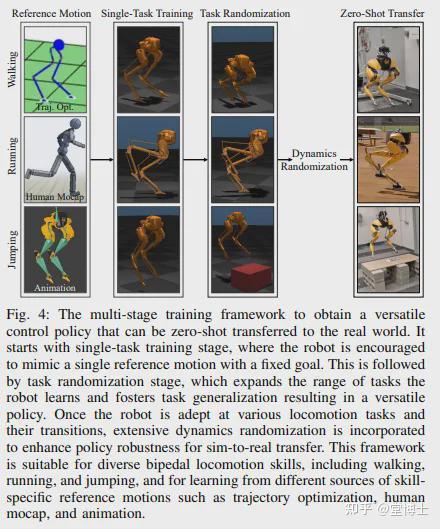
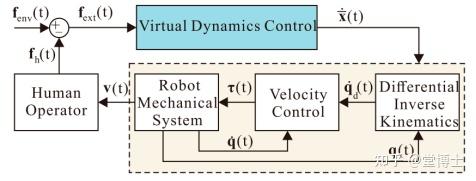
IJRR顶刊发布!浙大王越、熊蓉教授团队新型控制器实现人机交互新突破 - 机器人大讲堂
The International Journal of Robotics Research Template - SAGE
IJRR顶刊发布!浙大王越、熊蓉教授团队新型控制器人机交互新突破_腾讯新闻
Vehicle Autonomy and Intelligence Lab
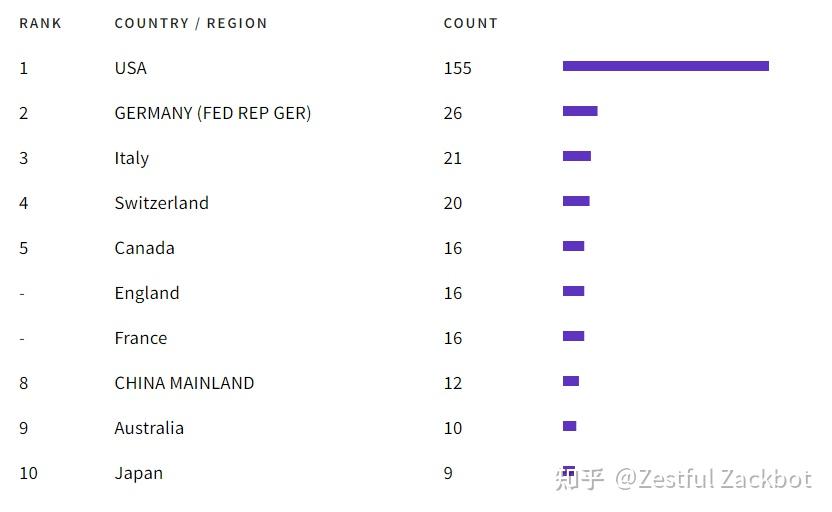
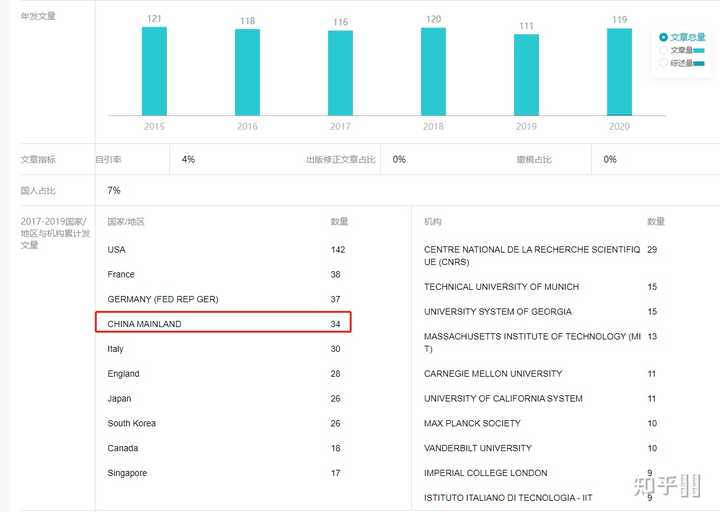
如何看待机器人学科世界顶级期刊IJRR没有中国第一单位的文章? - 知乎
变形通用机器人? IJRR顶刊深度解析模块化自重构机器人前世今生 - 知乎
IJRR发表!仿生机器人新突破,中国团队研发出一款轻量化“仿生水母机器人”,仅重287克_腾讯新闻
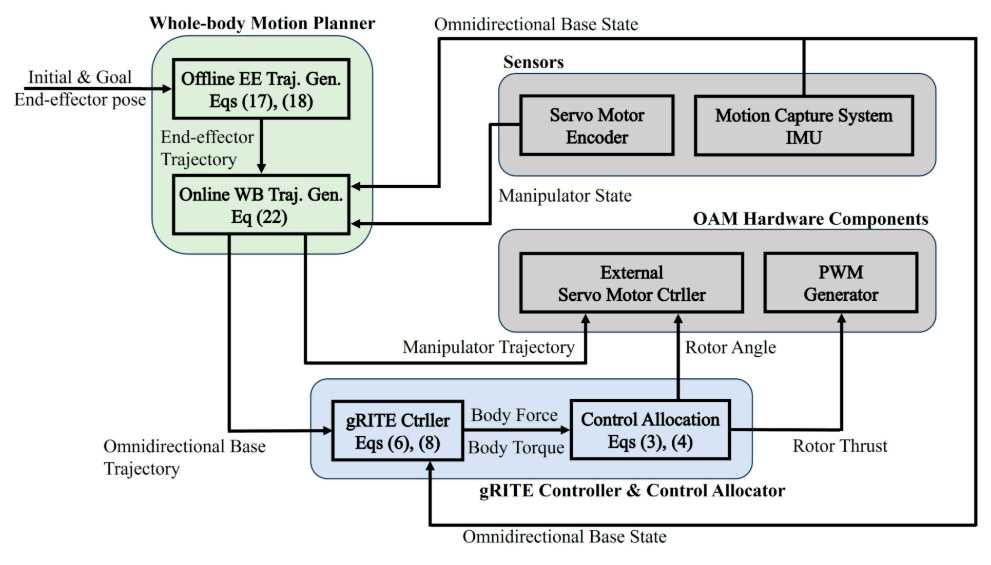
IJRR顶刊发布!这项全向空中机械臂黑科技,突破传统空中机器人作业极限 | 具身研习社
最新前沿进展!顶刊《IJRR》三月份机器人领域论文概述_腾讯新闻
期刊影响因子2024/2025: INTERNATIONAL JOURNAL OF ROBOTICS RESEARCH, INT J ...
顶刊IJRR 发表新成果!中大团队突破连续体机器人控制难题,NOKOV度量动作捕捉提供亚毫米级位姿数据支撑_实验_误差
机器人顶刊IJRR近期国人新作(2024)
Sriram Siva's Publications
在机器人领域一年发3篇IJRR或者TRO是怎样的体验? - 知乎
IJRR发表,软体机器人传感系统新突破!PneuGelSight 借机器视觉实现高精度本体与触觉感知 - 知乎
IJRR顶刊发布!浙大王越、熊蓉教授团队新型控制器实现人机交互新突破 - 知乎
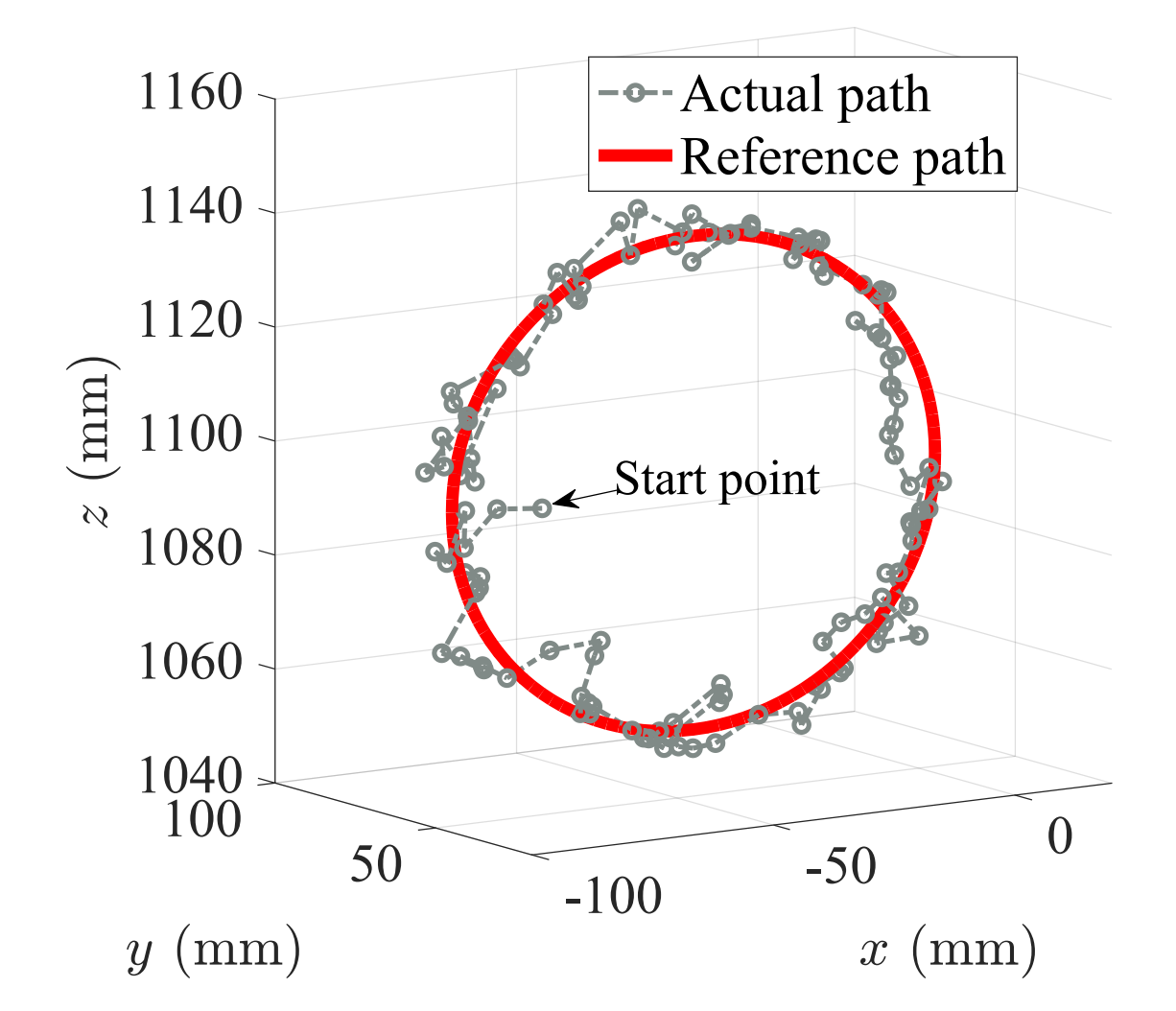
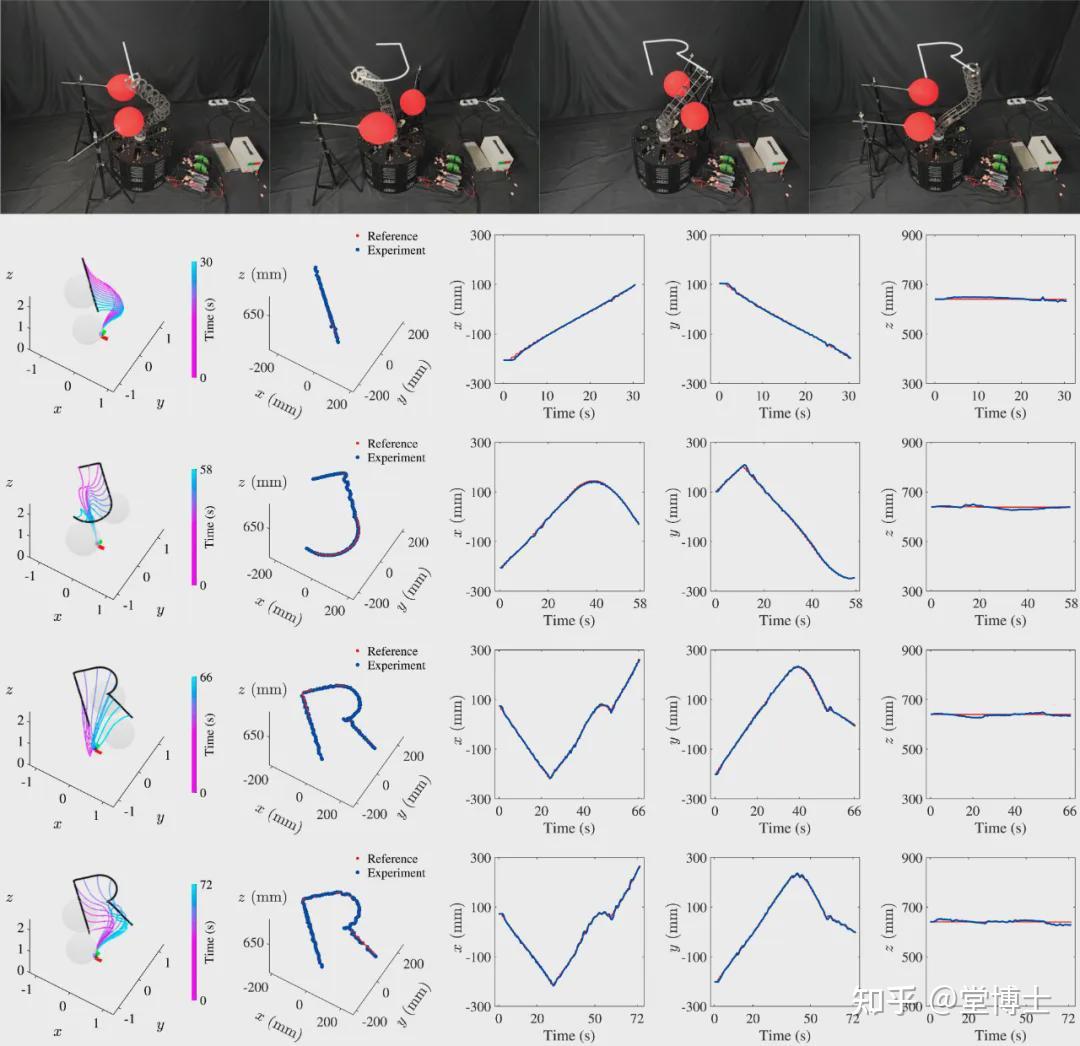
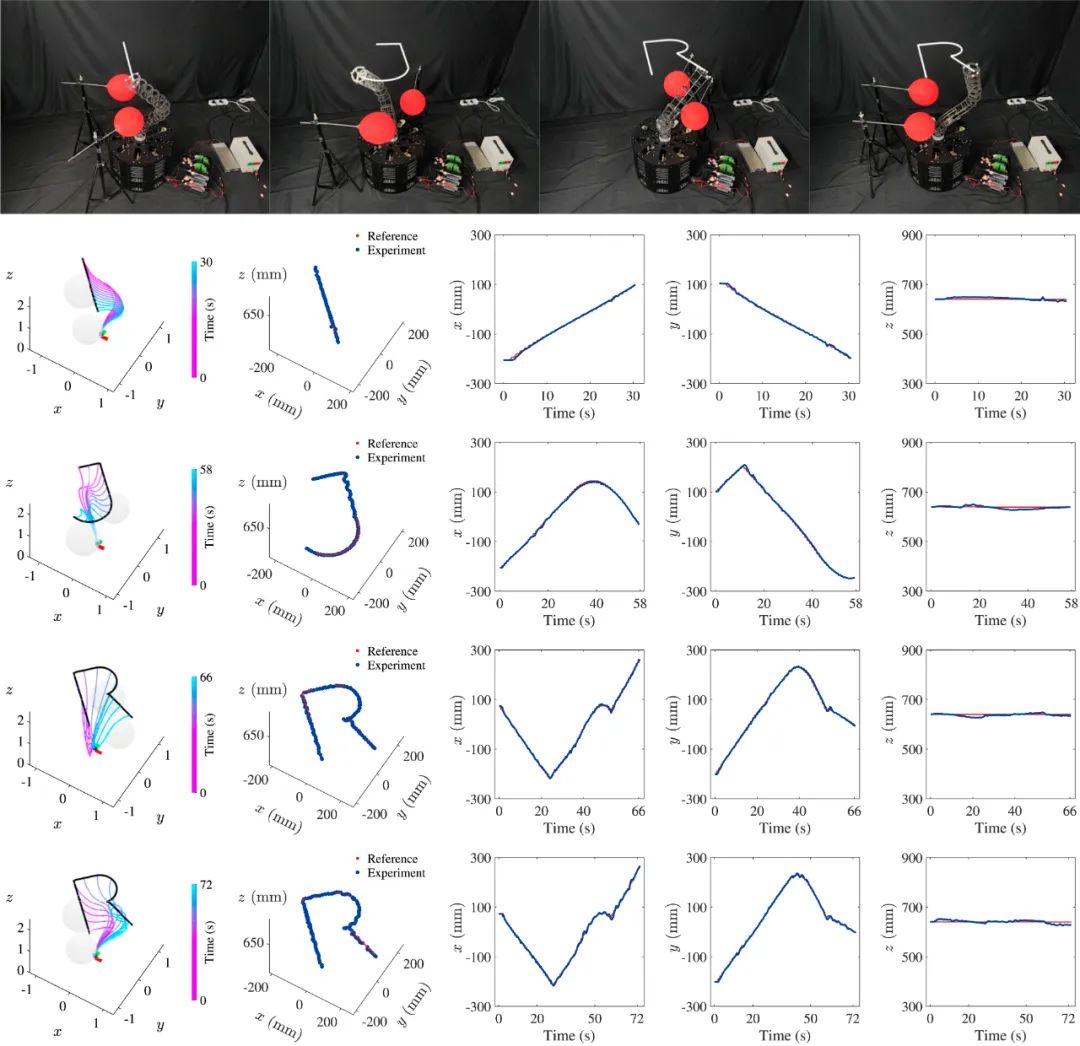
IJRR发表!浙大控制学院熊蓉团队提出驱动器空间最优控制框架,改善连续体机器人路径跟踪精度! - 知乎
Photo-realistic synthetic data for robotics research 🤖 🛩️ 🎥 Excited to ...
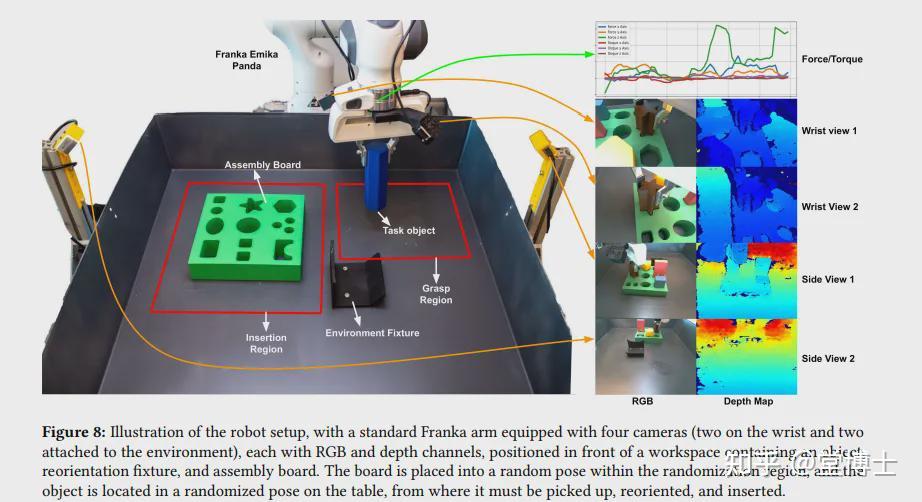
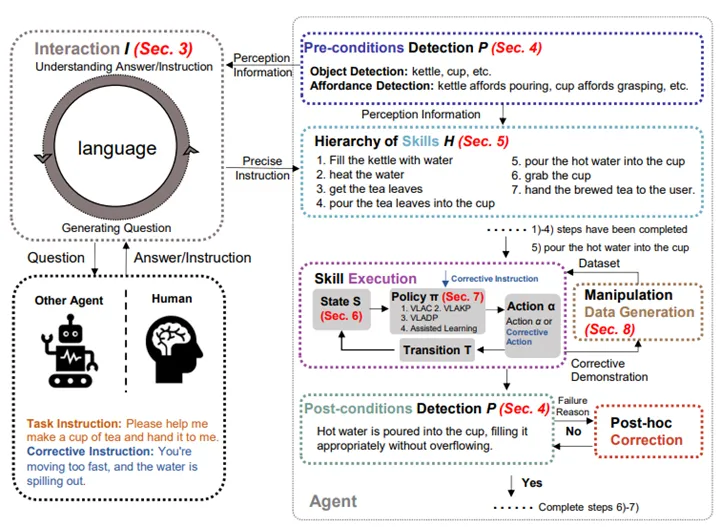
IJRR北邮首篇,联合三星中国研究院、清华大学等共同探讨“机器人操作大模型”_intrinsic robotics foundation ...
IJRR发表!仿生机器人新突破,中国团队研发出一款轻量化“仿生水母机器人”,仅重287克 - 机器人世界
IJRR发表!浙大控制学院熊蓉团队提出驱动器空间最优控制框架,改善连续体机器人路径跟踪精度! | 具身研习社
IJRR北邮首篇,联合三星中国研究院、清华大学等共同探讨“机器人操作大模型”-A³·爱力方
(IJRR) Decentralized Trajectory Planning for Quadrotor Swarm in ...
最新前沿进展!顶刊《IJRR》三月份机器人领域论文概述 - 知乎