Showing 120 of 120on this page. Filters & sort apply to loaded results; URL updates for sharing.120 of 120 on this page
Kenji Koide @ AIST
Kenji Koide | Facebook
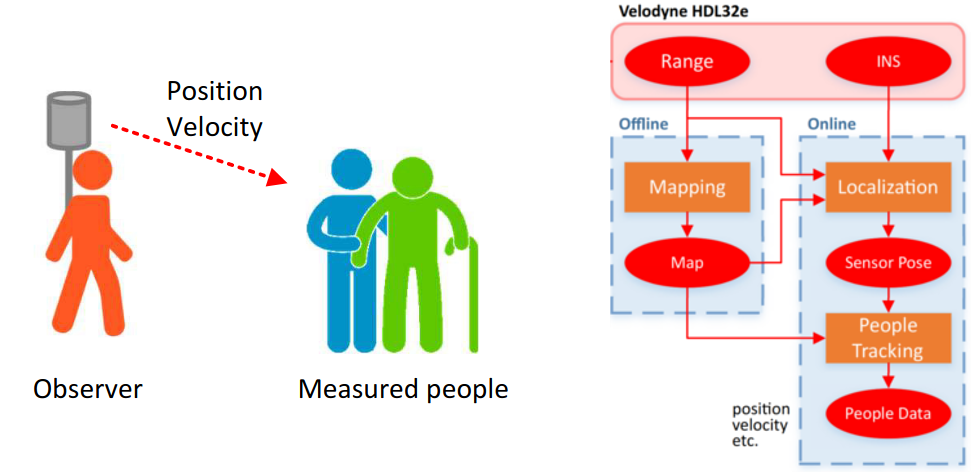
Range-based Localization and Mapping @ Kenji Koide
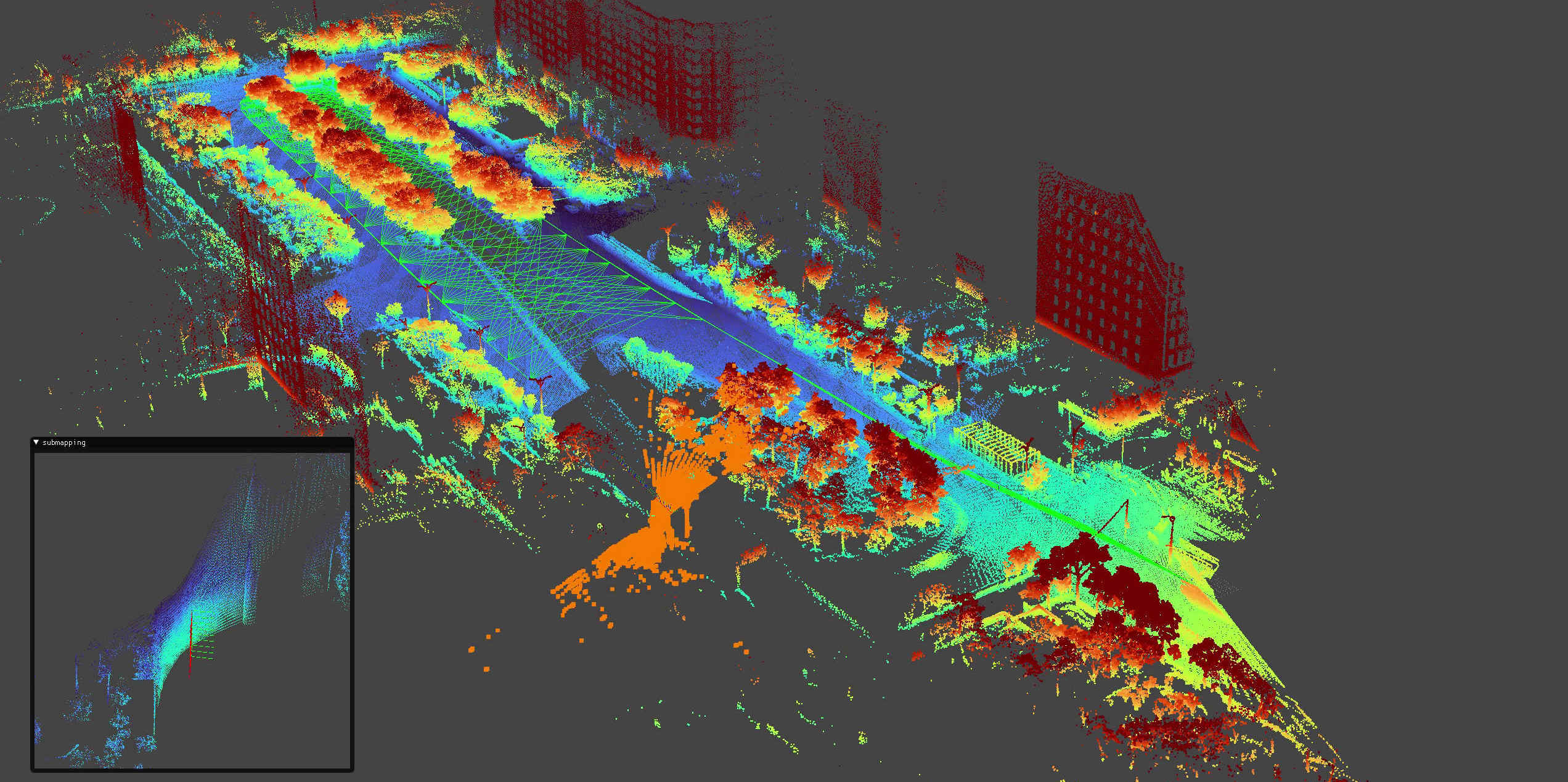
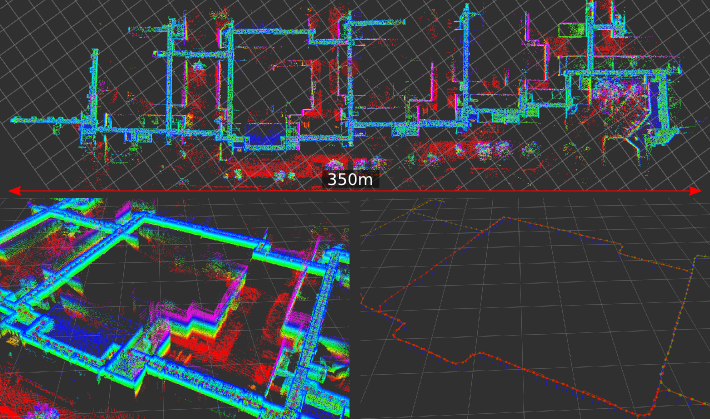
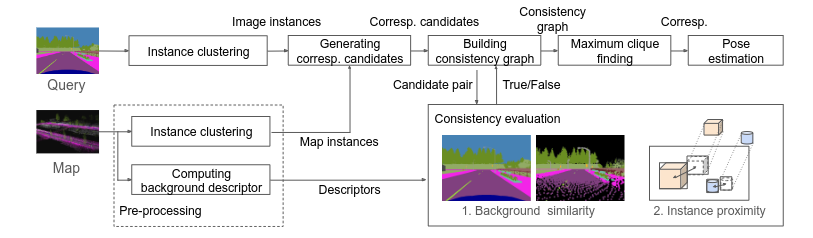
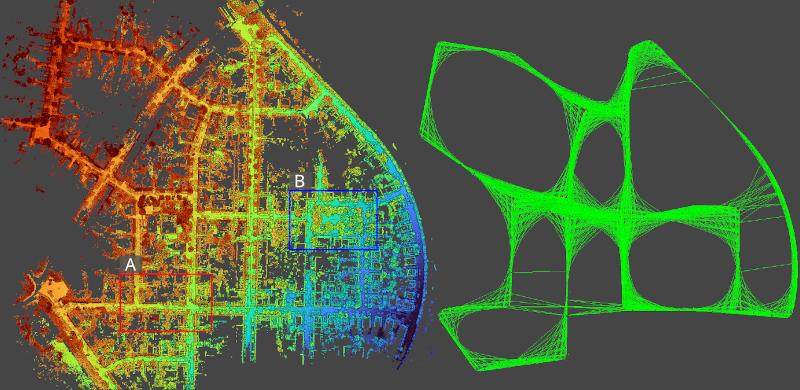
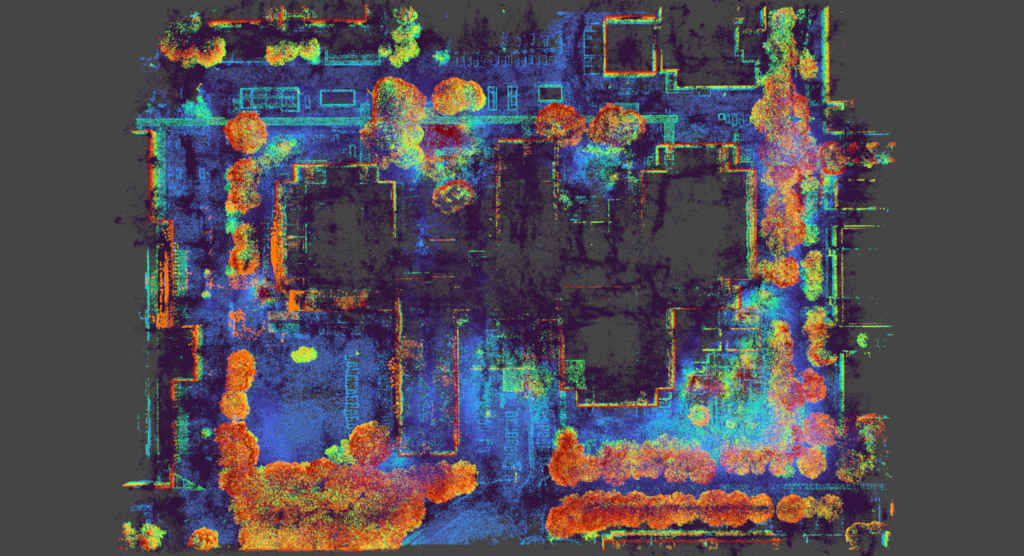
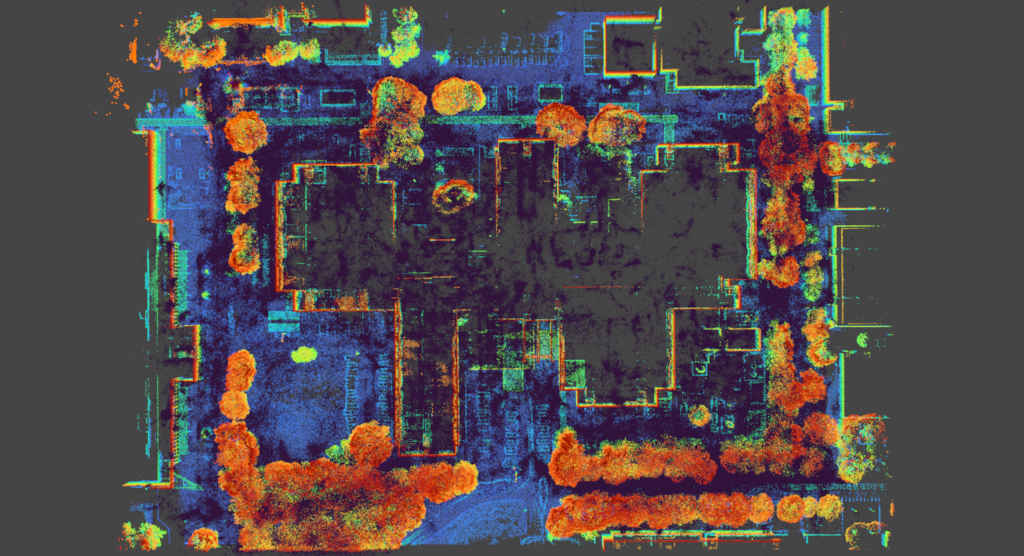
Kenji Koide @ AIST | Globally Consistent 3D LiDAR Mapping
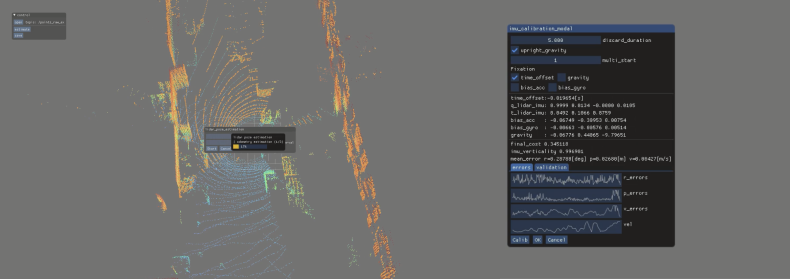
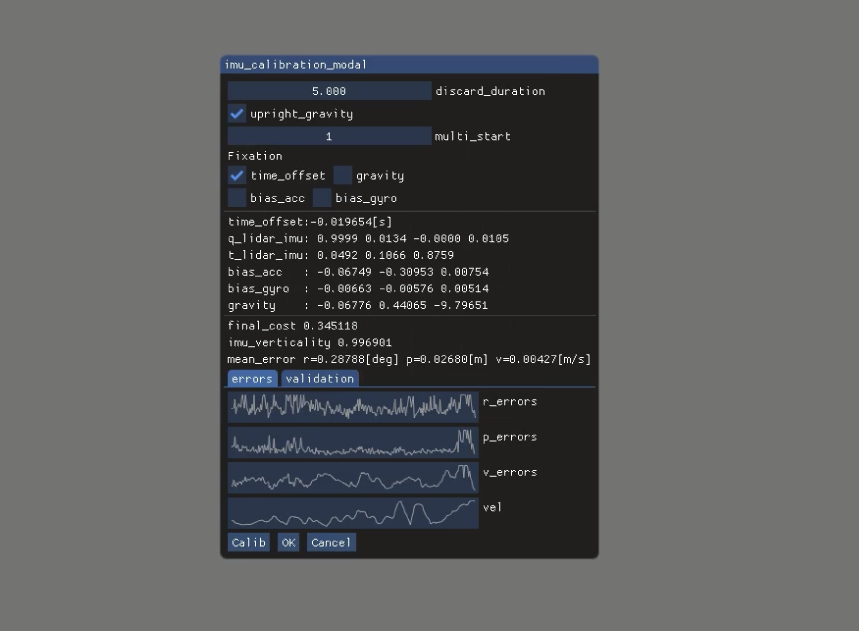
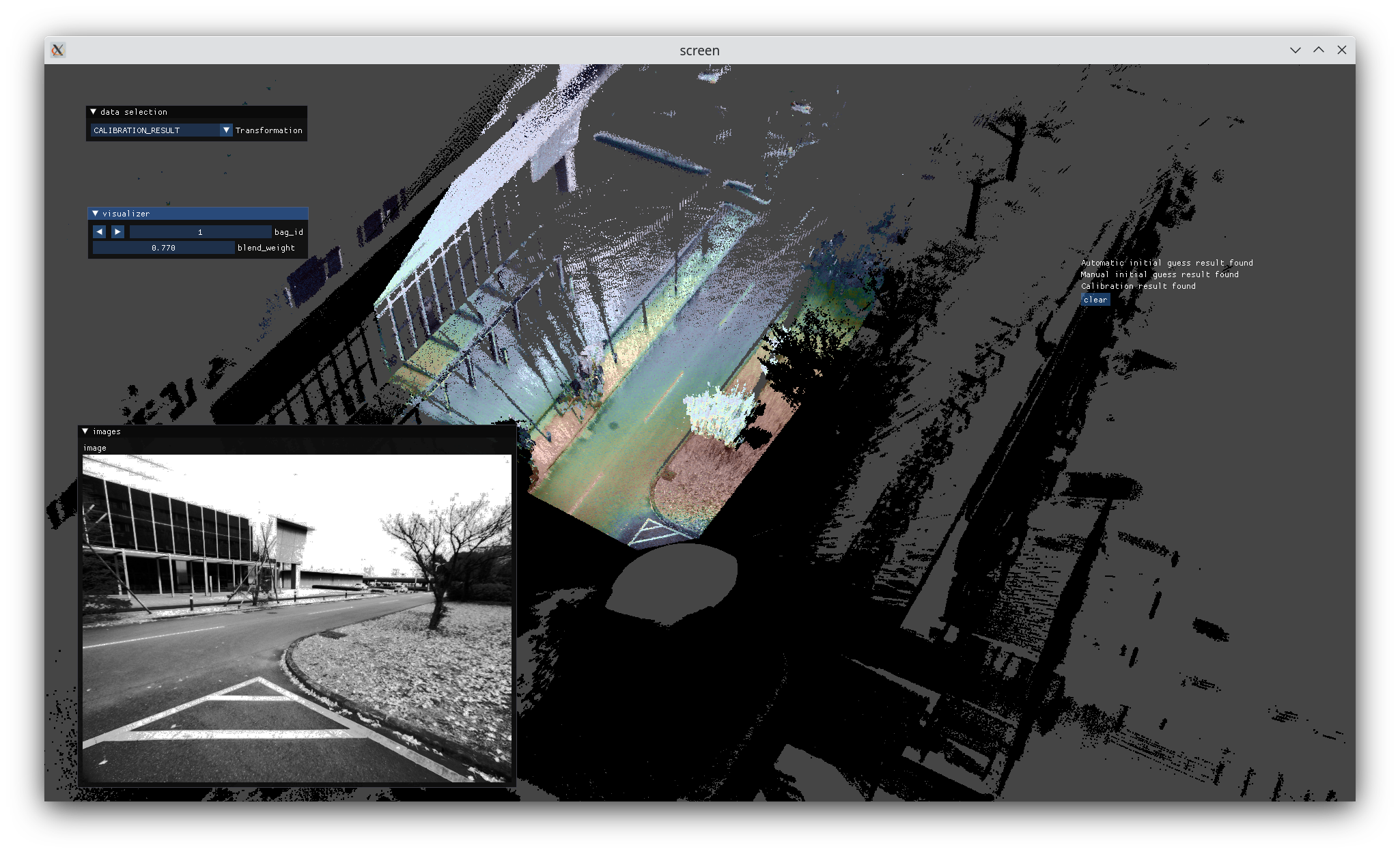
LiDAR / Camera / IMU Calibration @ Kenji Koide
Kenji Koide
Student Projects @ Kenji Koide
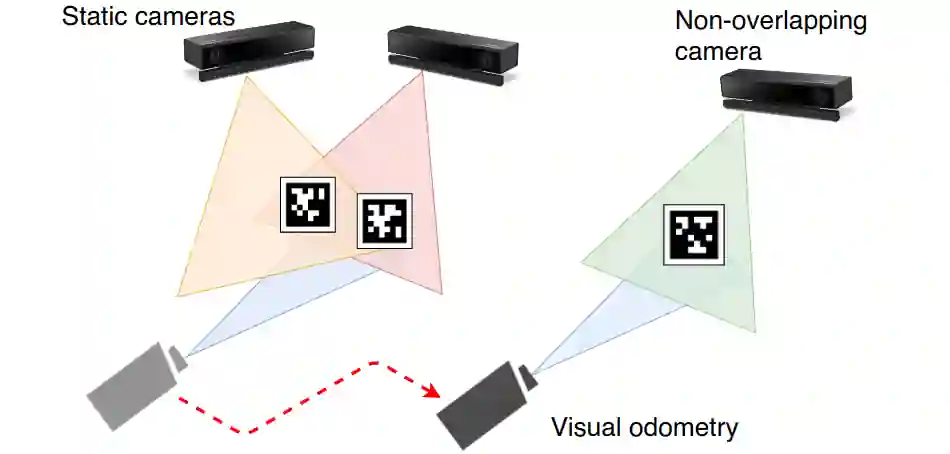
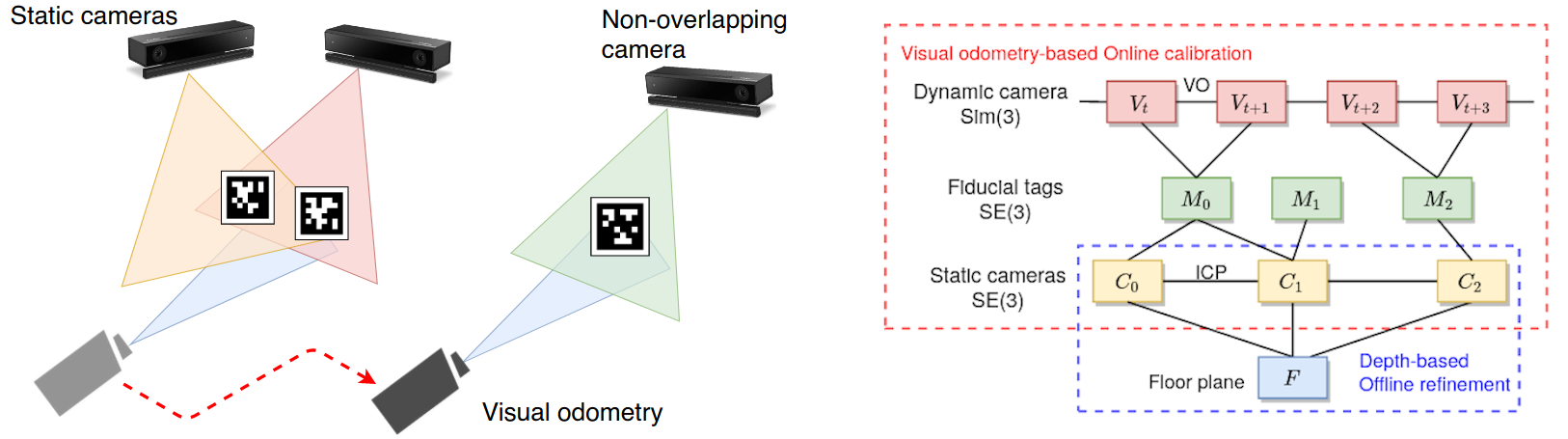
Camera Network @ Kenji Koide
Kenji KOIDE | Researcher | Doctor of Engineering | National Institute ...
Kenji Koide - YouTube
Kenji Koide - Kenji Koide added a new photo.
Kenji Koide - こんな輩もいた 江戸 元禄 人模様 寺子屋師匠 菊池三之丞事件控え アマゾン 多摩川 健か... | Facebook
Kenji - アマゾン 多摩川健から こんな輩もいた 江戸 元禄人模様 その1からその3デス よろしくお願いします 今日も楽しい一日であり ...
Smart Mobility Research Team | Team | Digital Architecture Research ...
KenjutsuWorld.com added a new photo. - KenjutsuWorld.com
Abstract
Drawables - Iridescence
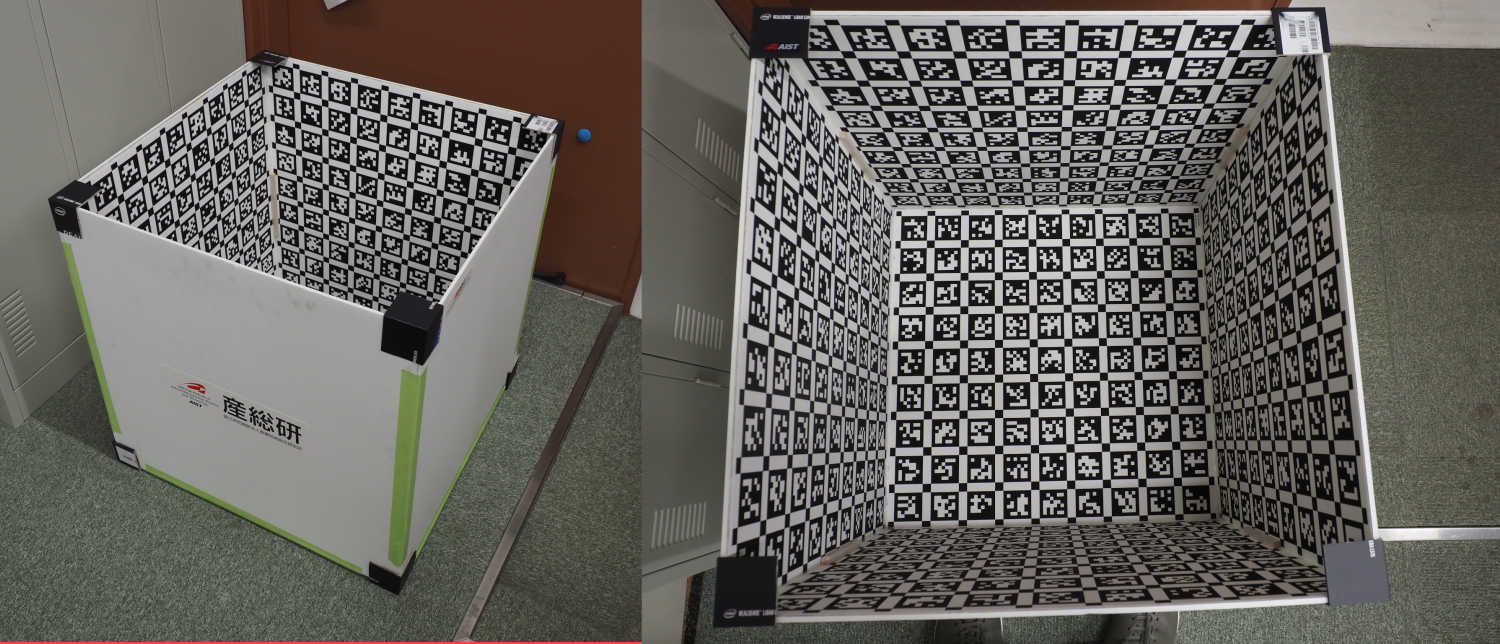
Sensor configurations for LiDAR-camera calibration experiments ...
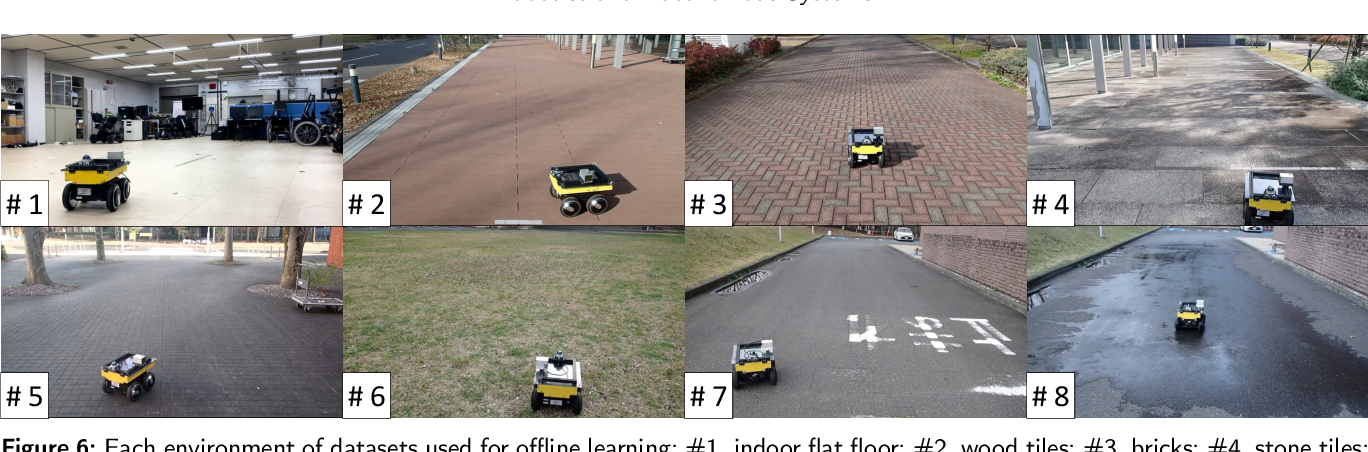
Experimental environment. | Download Scientific Diagram
Flatwall experiment dataset - GLIM
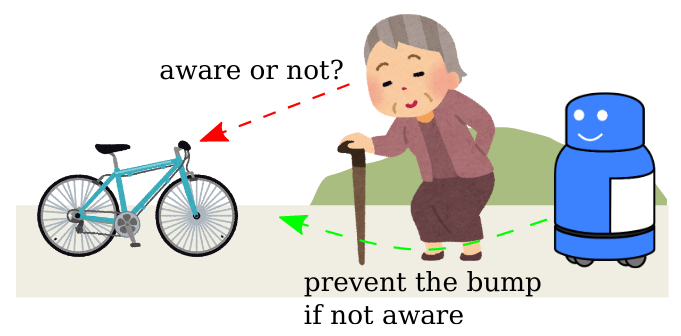
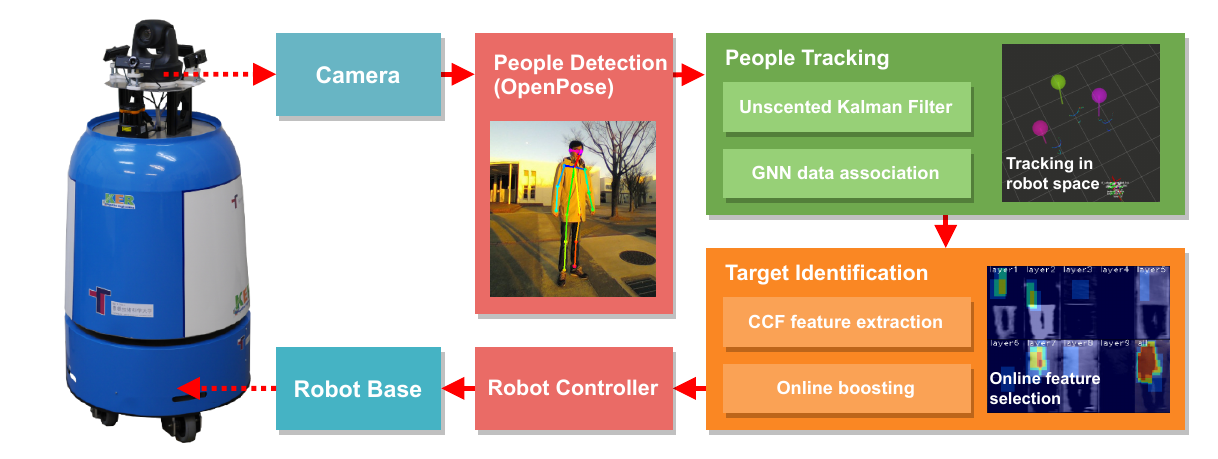
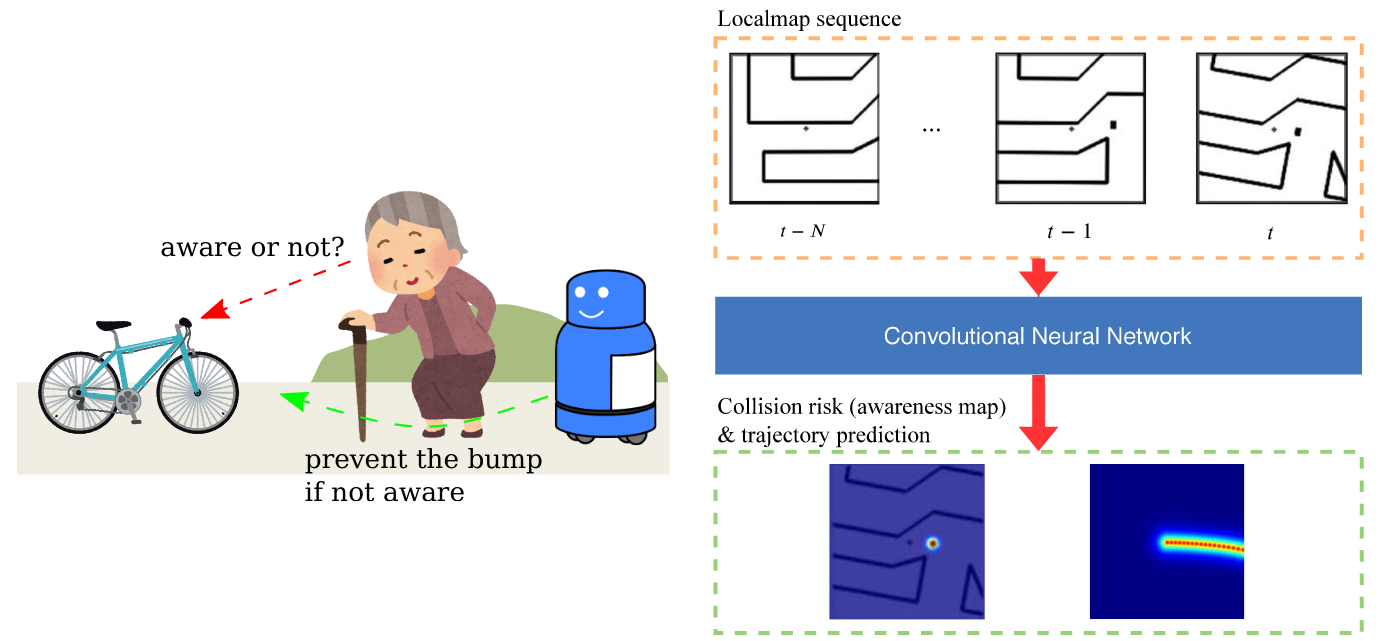
Person following robot. | Download Scientific Diagram
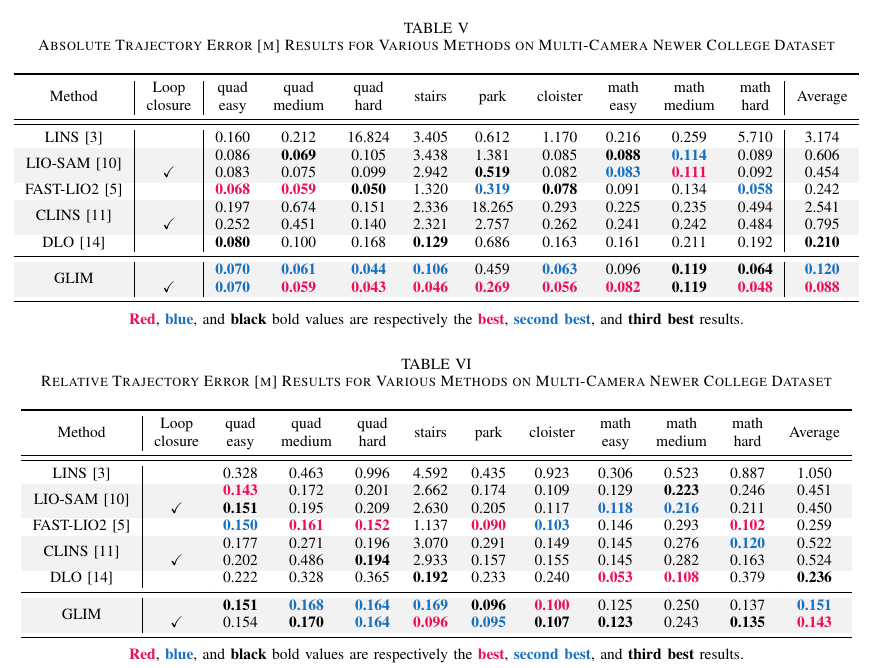
Newer College Dataset - GLIM
The proposed algorithm extracts a weighted subset of input source ...
Optimization time breakdown. | Download Scientific Diagram
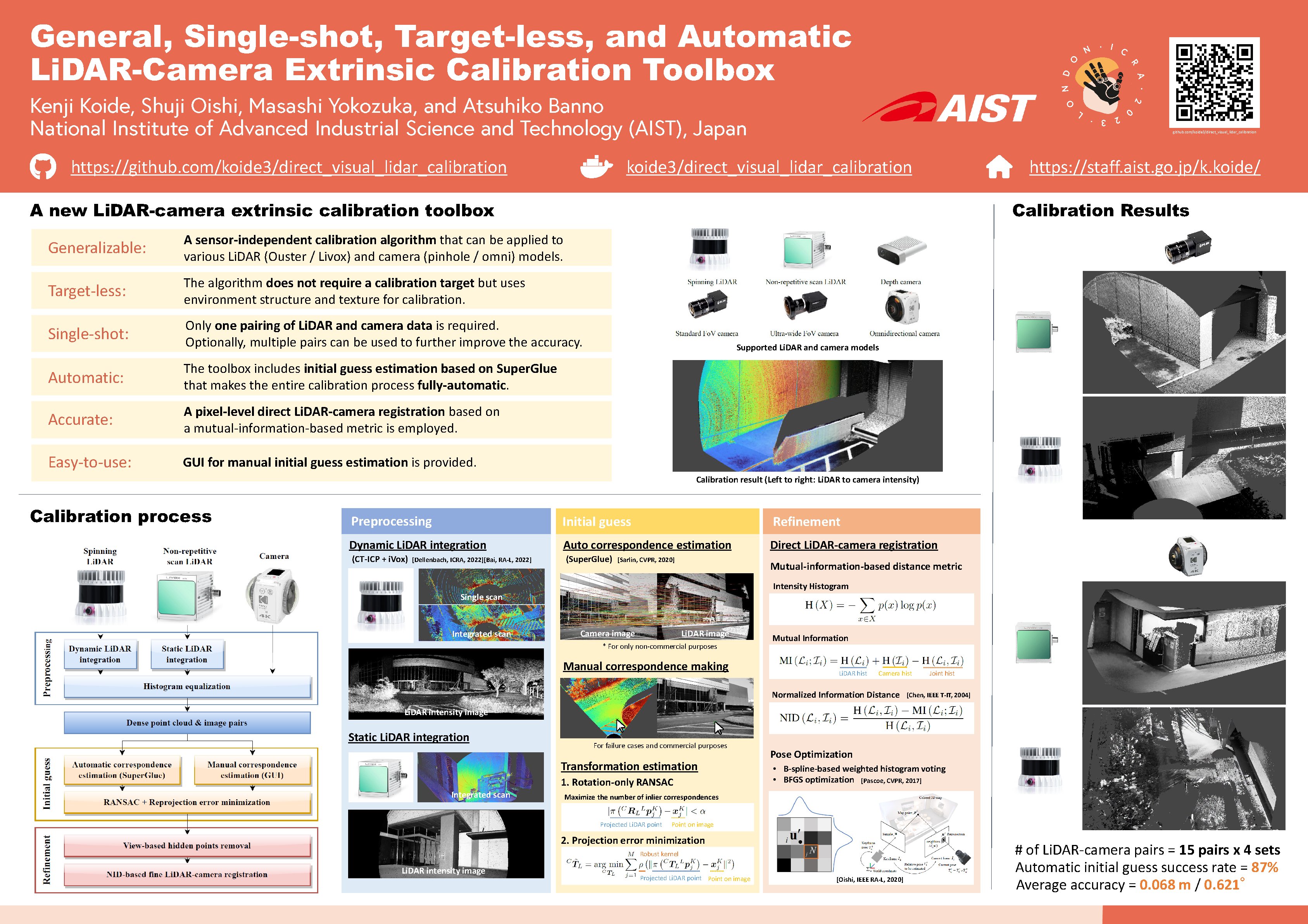
Program details - direct_visual_lidar_calibration
IEEE Robotics and Automation Letters/ICRA2019 presentation, Vol. 4 ...
Overview of the proposed adaptive parameter tuning framework ...
Errors of the displacement vector ∆x = H −1 b of random and exact ...
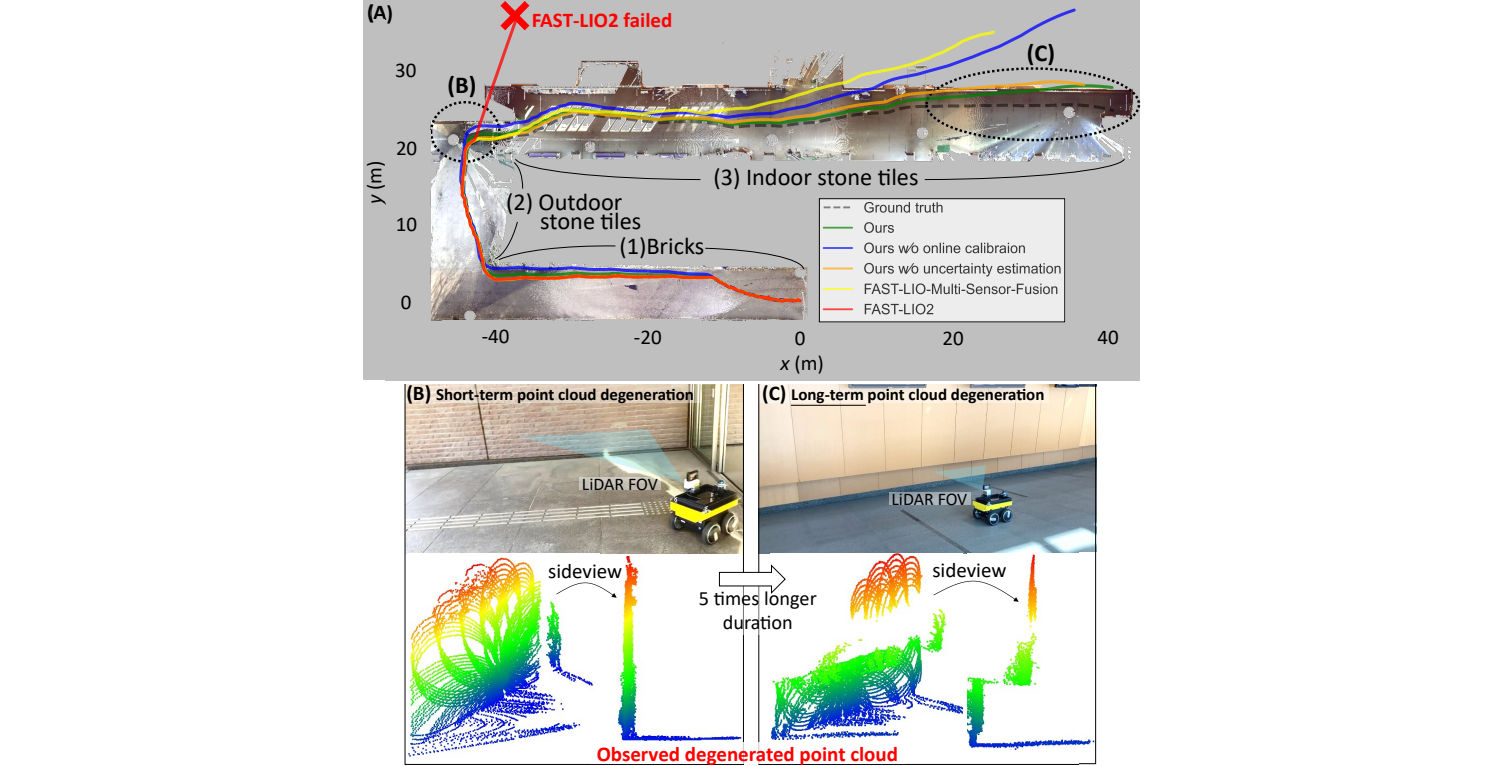
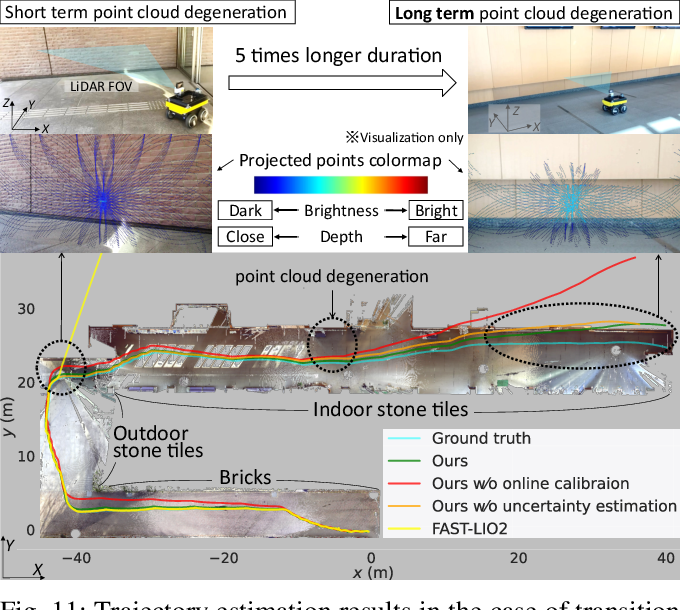
Figure 6 from Tightly-Coupled LiDAR-IMU-Wheel Odometry with an Online ...
Dense factor graph for global registration error minimization. The ...
Feature maps extracted by CCF10. Each filter shows strong responses for ...
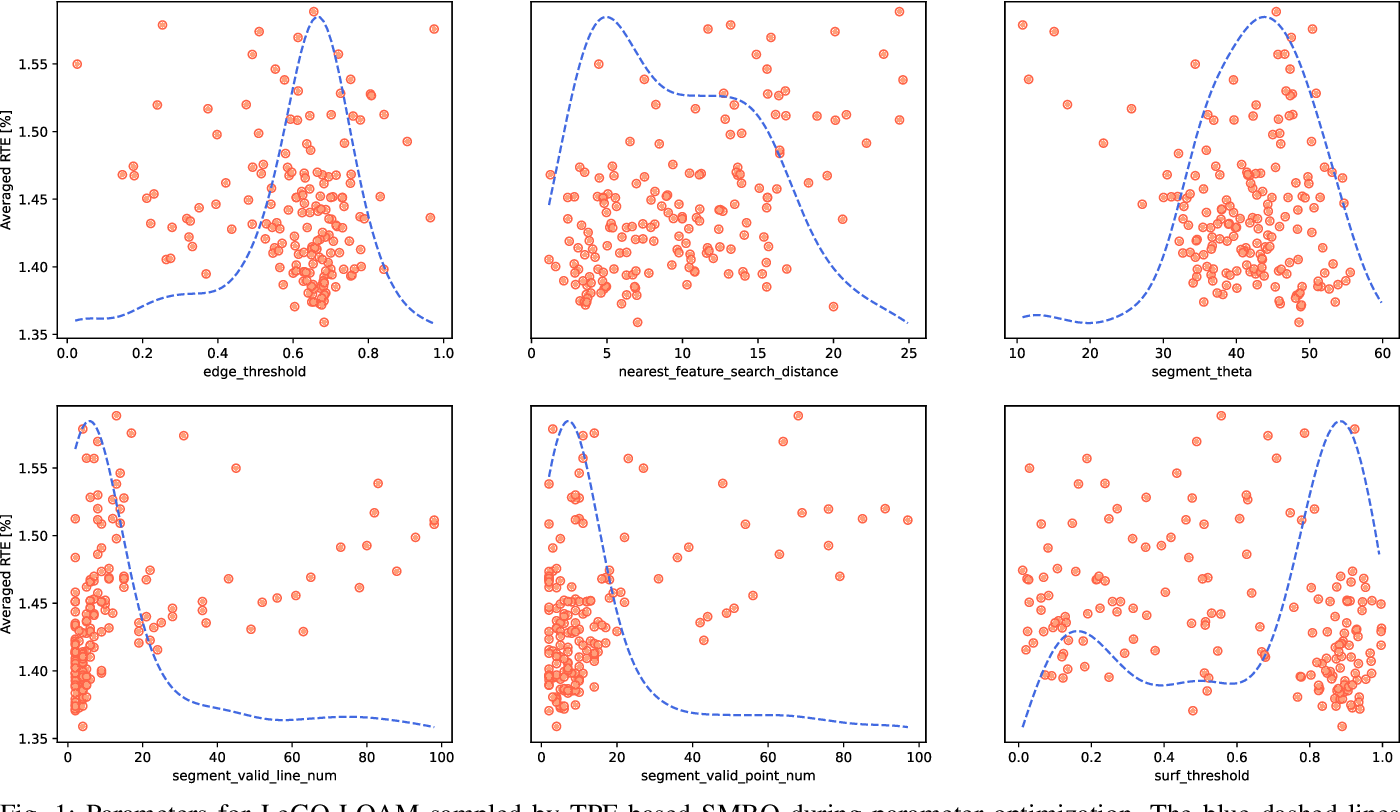
Figure 1 from Automatic Hyper-Parameter Tuning for Black-box LiDAR ...
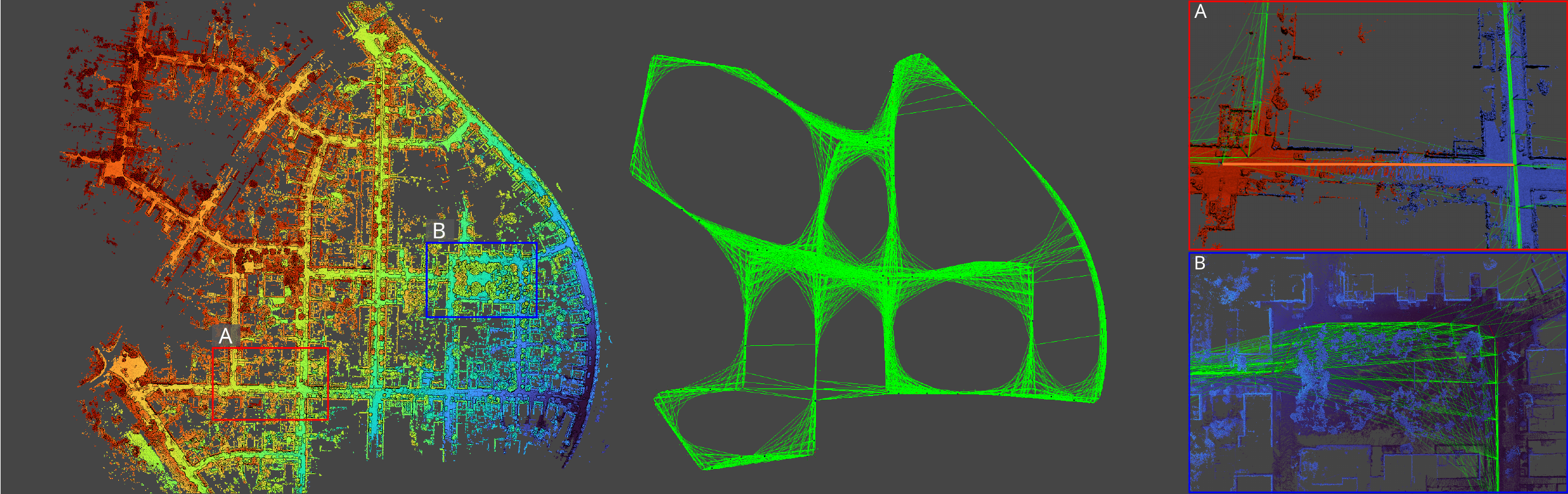
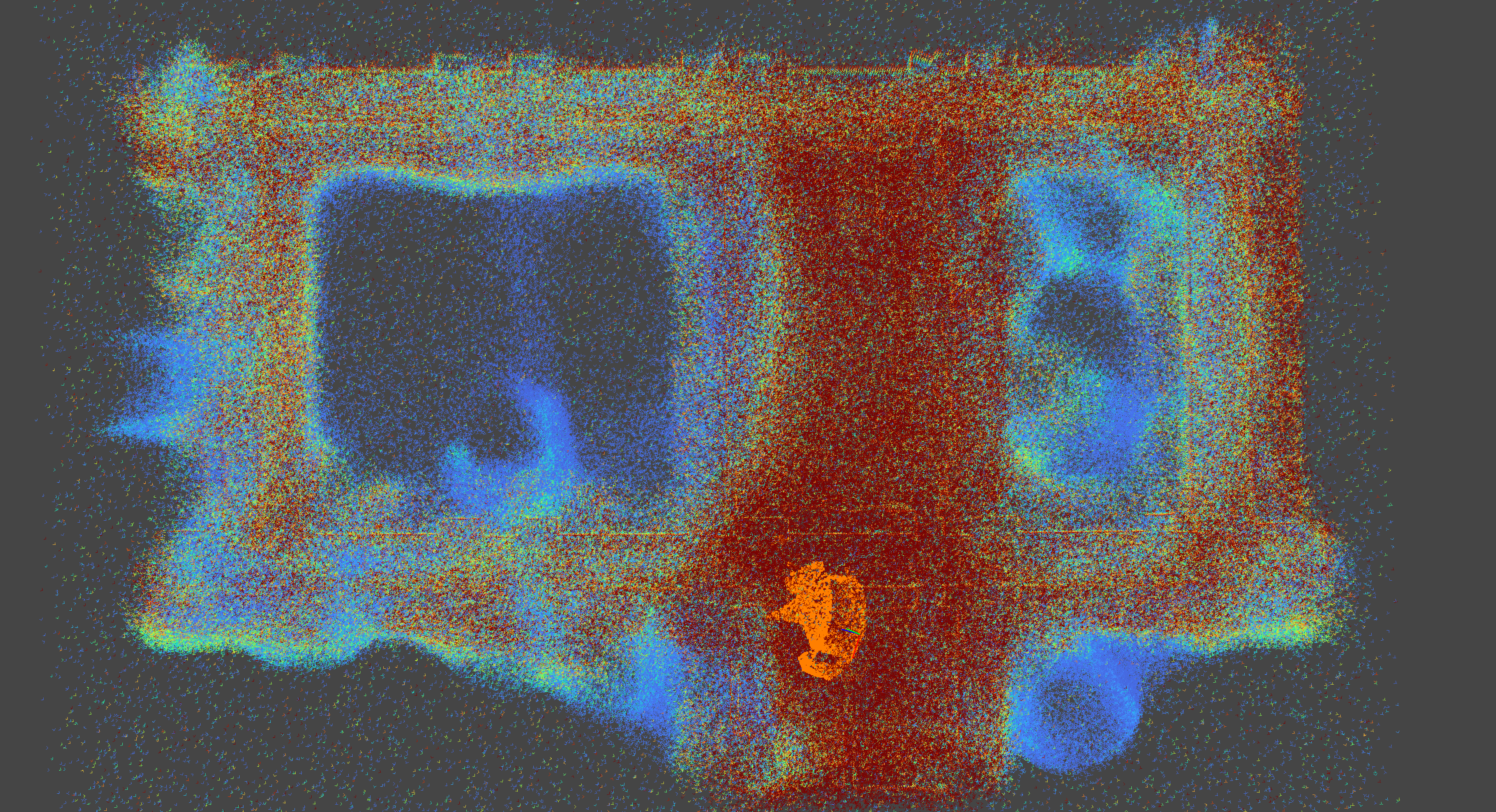
Dense pose graph optimization result. Color indicates the magnitude of ...
Figure 11 from Tightly-Coupled LiDAR-IMU-Wheel Odometry With Online ...
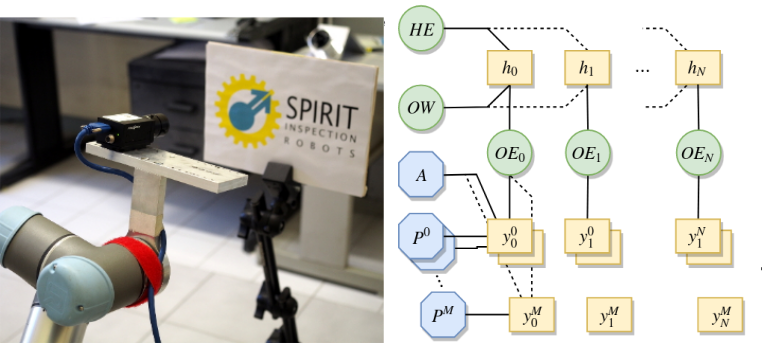
The proposed graph structure for non-overlapping camera network ...
Pose graph correction process (top to bottom). | Download Scientific ...
A portable three-dimensional LIDAR-based system for long-term and wide ...
LK - 🎉 Welcome 2026 in Shinjuku! 🎉 Tokyu Kabukicho Tower – New Year’s ...
Samurai-fr - #Samouraïs | Facebook
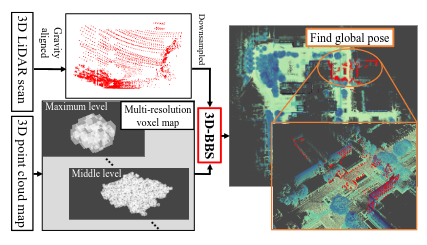
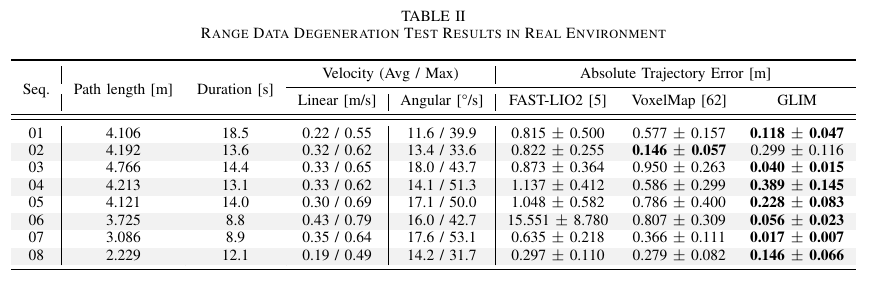
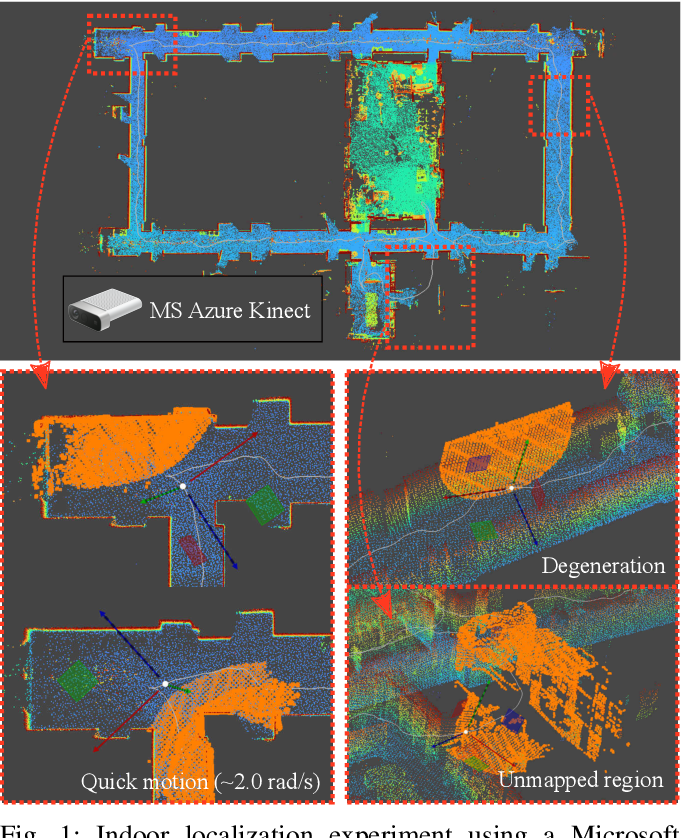
Figure 1 from Tightly Coupled Range Inertial Localization on a 3D Prior ...
[ICRA2024] Tightly Coupled Range Inertial Localization on a 3D Prior ...
Pioneering people-centric AI in a data-centric world
[IROS2021] Adaptive Hyper-Parameter Tuning for Black-box LiDAR Odometry ...
Figure 2 from Globally Consistent and Tightly Coupled 3D LiDAR Inertial ...
Figure 2 from Tightly-Coupled LiDAR-IMU-Wheel Odometry with an Online ...
Sinciput detection procedure. | Download Scientific Diagram
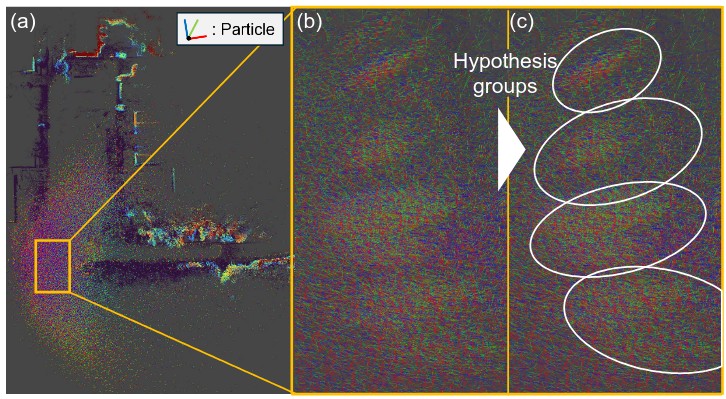
Figure 5 from MegaParticles: Range-based 6-DoF Monte Carlo Localization ...
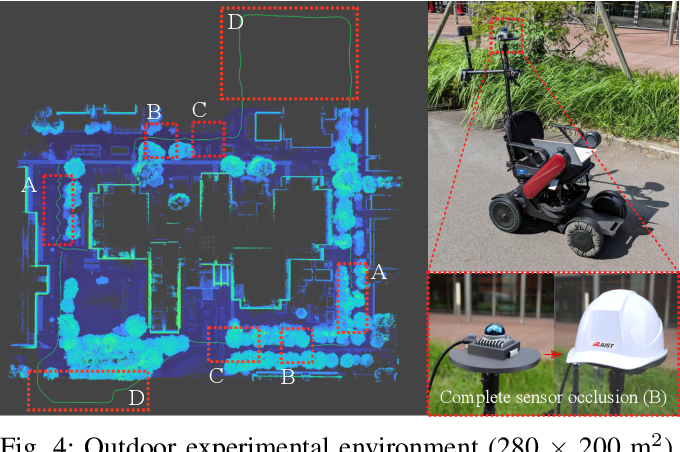
[ICRA2025] Tightly Coupled Range Inertial Odometry and Mapping with ...
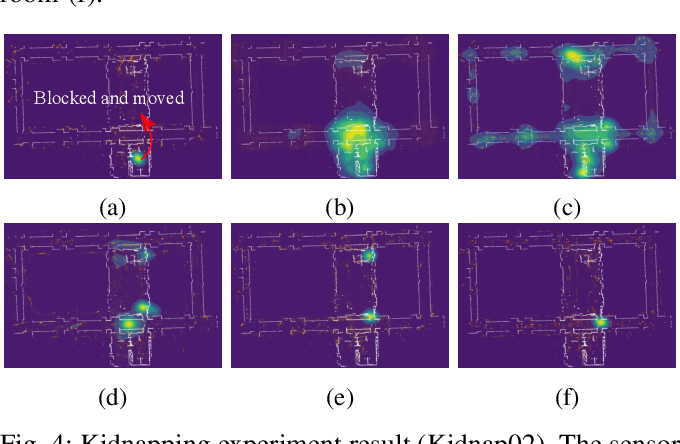
Figure 4 from Tightly Coupled Range Inertial Localization on a 3D Prior ...
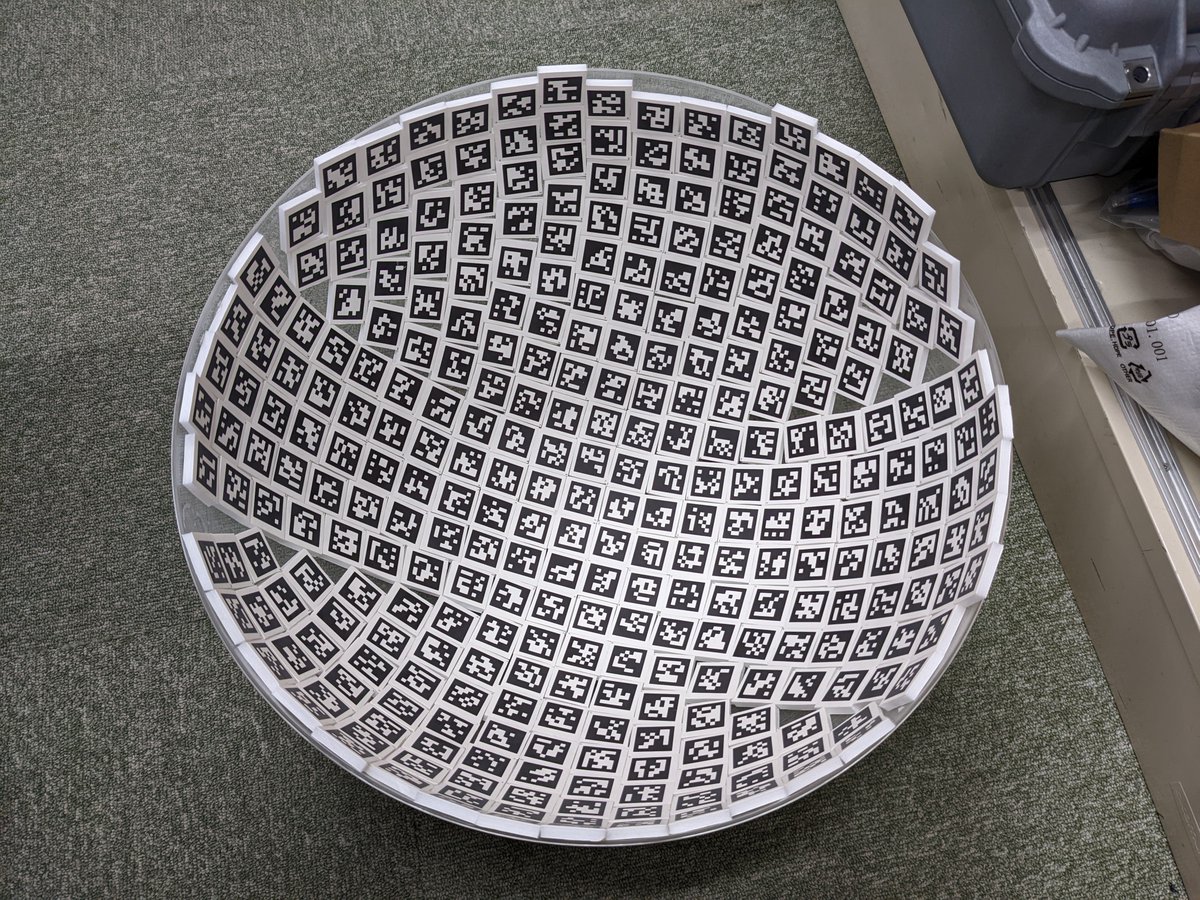
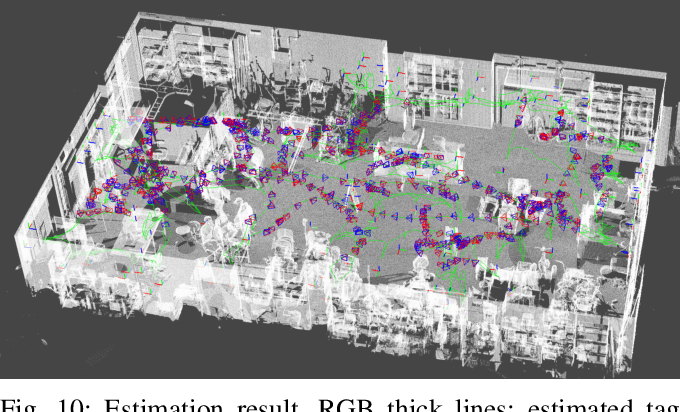
Figure 10 from Scalable Fiducial Tag Localization on a 3D Prior Map via ...
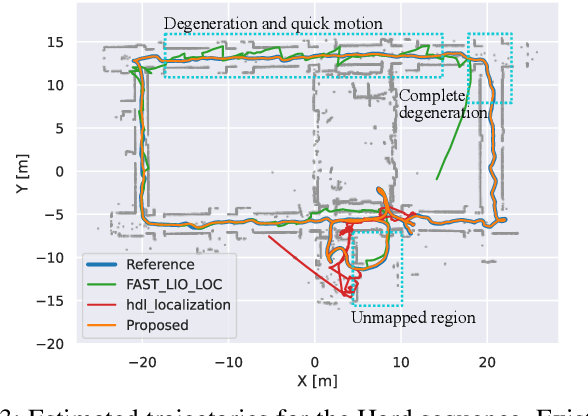
Figure 3 from Tightly Coupled Range Inertial Localization on a 3D Prior ...
The images for reconstruction and the keypoint correspondences ...
Indah - 江戸の女 | Facebook
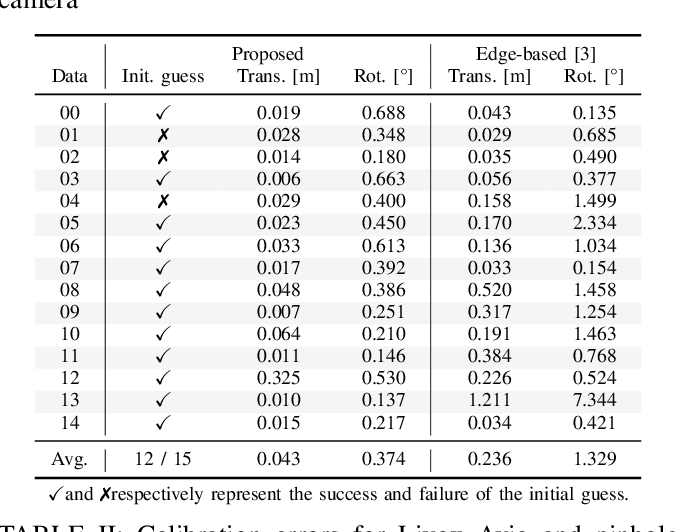
Table I from General, Single-shot, Target-less, and Automatic LiDAR ...
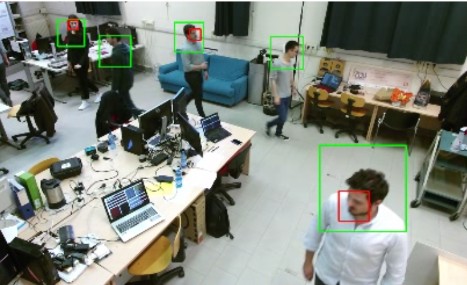
ROIs calculated from person positions provided by the LRFs (Red ...
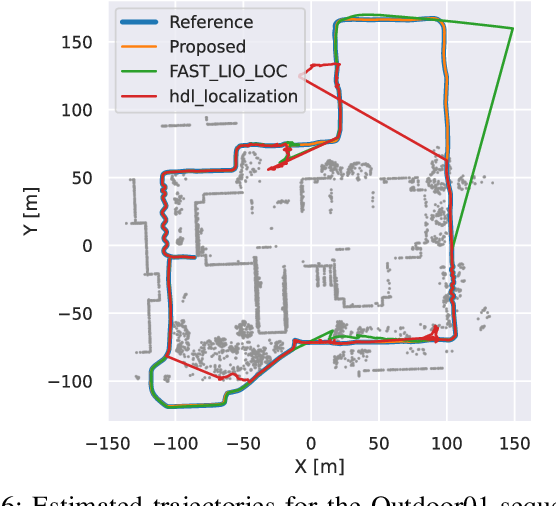
Figure 6 from Tightly Coupled Range Inertial Localization on a 3D Prior ...
Figure 4 from MegaParticles: Range-based 6-DoF Monte Carlo Localization ...
sensitive_samurai - Shout out to my newest followers! Excited to have ...
(PDF) small_gicp: Efficient and parallel algorithms for point cloud ...
Convolutional Channel Features-based person identification framework ...
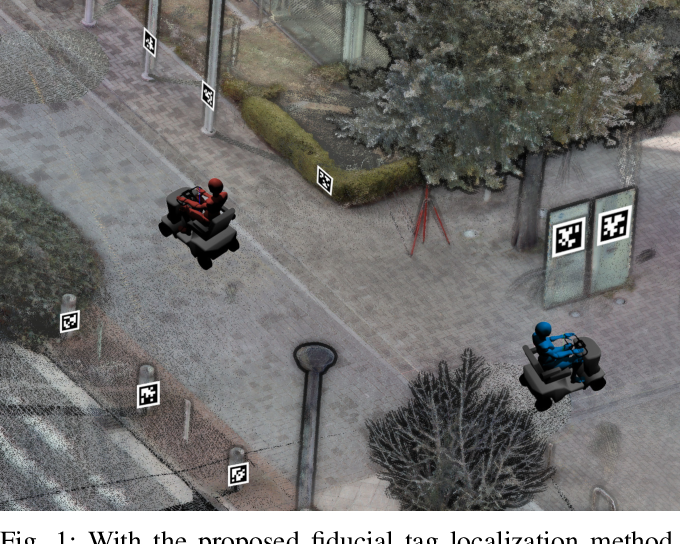
Figure 1 from Scalable Fiducial Tag Localization on a 3D Prior Map via ...
TRACE | Members
Infovaya • Presentation
[ICRA2022] Globally Consistent and Tightly Coupled 3D LiDAR Inertial ...
きものカンタービレ - 【9月だけど薄物】 9月になりましたが、30℃を上回る暑さ🥵... | Facebook
Table 1 from Tightly-Coupled LiDAR-IMU-Wheel Odometry with an Online ...
Japan - Hello Monday ☀️ | Facebook
(PDF) LiDAR Beacon: 300-m-Range Fiducial Marker for Mobile Robot ...
Processing time for each person image | Download Table
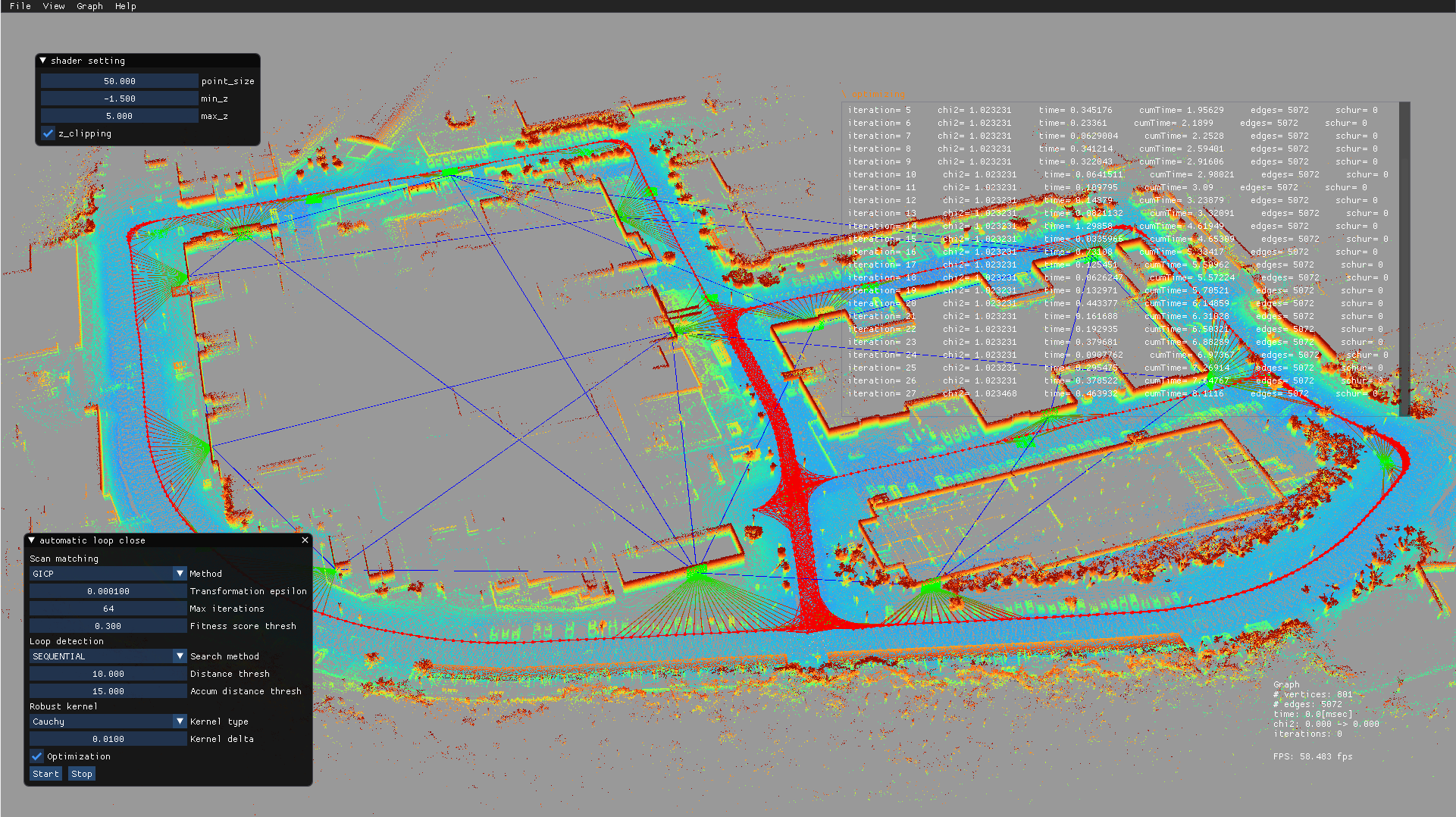
発展版機能について · koide3/interactive_slam Wiki · GitHub
Hand-eye transformation estimation evaluation with a source-detector ...
MegaParticles
A snapshot of the experiment in a real environment. | Download ...
フェイスブックで落語研究会 | しのばず寄席 夜席 上野広小路亭 | Facebook