Showing 112 of 112on this page. Filters & sort apply to loaded results; URL updates for sharing.112 of 112 on this page
An illustration of the Hopper task in the MuJoCo locomotion benchmark ...
MuJoCo Hopper C-R-TD3-500 - YouTube
Mujoco Hopper (TRPO) - YouTube
Kết quả thực nghiệm Mujoco Hopper PPO - YouTube
GitHub - sizzle0121/Mujoco-Hopper: Mujoco Hopper agent with DDPG · GitHub
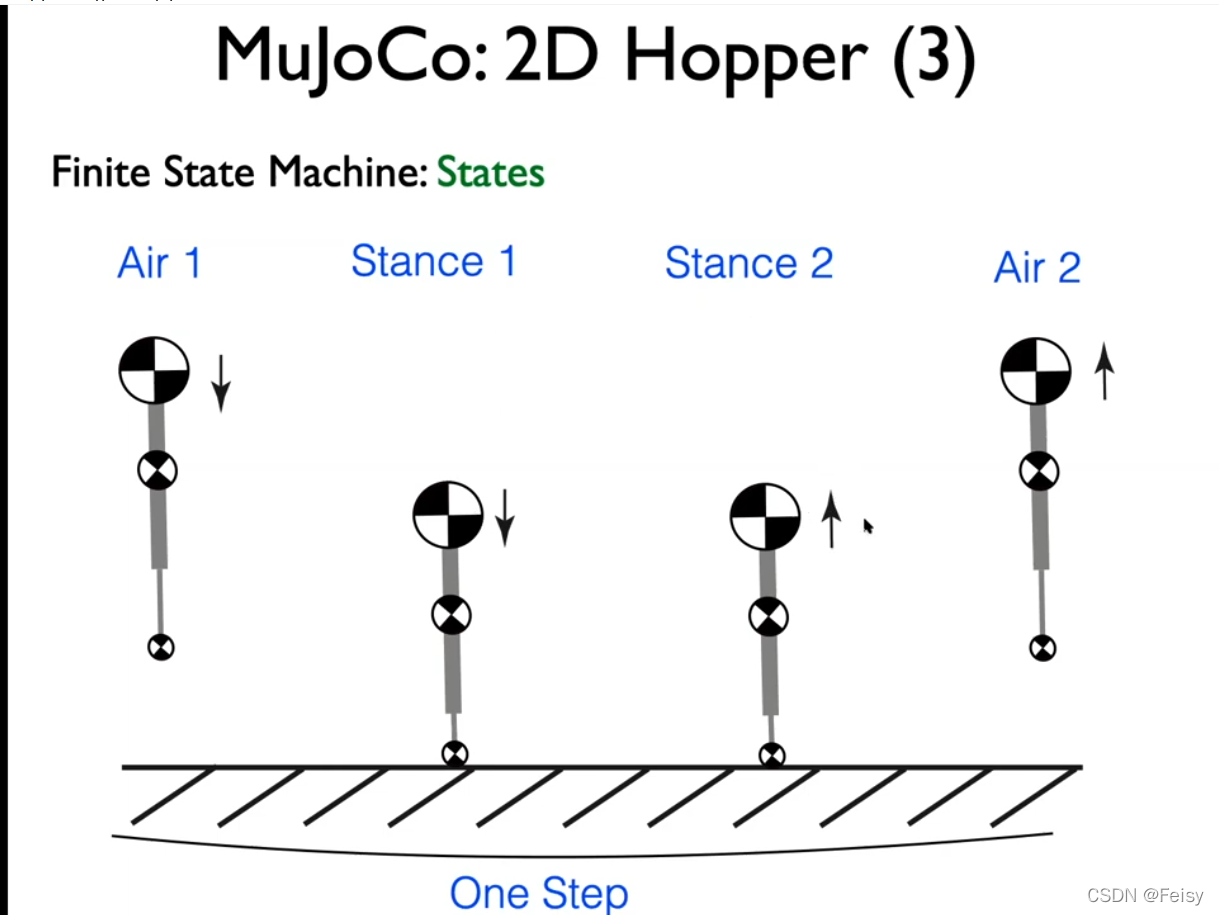
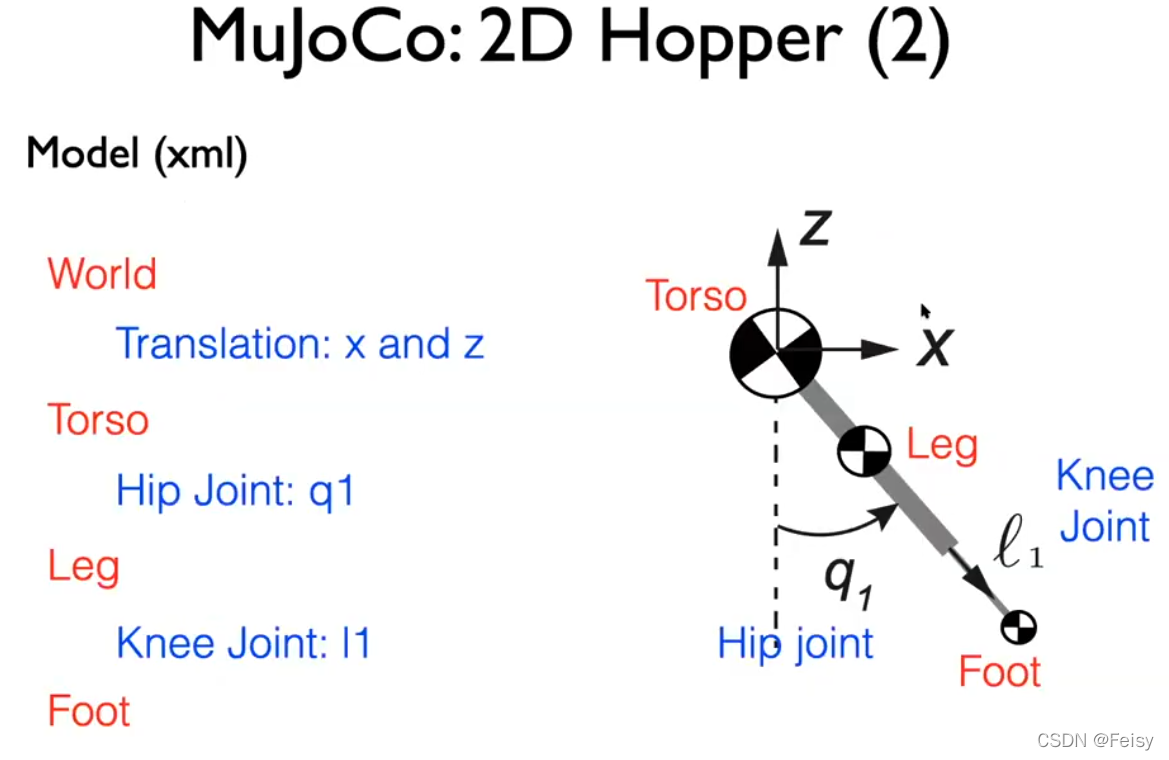
MuJoCo Lec9: 2D Hopper (Spring 2022) - YouTube
DDPG Mujoco Hopper - YouTube
Raibert 3D Hopper in Mujoco - YouTube
MuJoCo - Gym Documentation
Mujoco 2D hopper_mujoco hopper-CSDN博客
MuJoCo test environments. (a) Hopper-v2, (b) HalfCheetah-v2, (c ...
OpenAI Mujoco Hopper-v2 environment with SAC - YouTube
Hopper2D task build atop MuJoCo [7] and DART [6] simulation engines ...
How to make a GIF from MuJoCo environment observations programmatically ...
SAC Mujoco Hopper-v2 - YouTube
In mujoco Hopper-v2 Environment what are the observations' names and ...
MuJoCo 入门教程(八)Model仓库_mujoco menagerie-CSDN博客
MuJoCo - Gymnasium Documentation
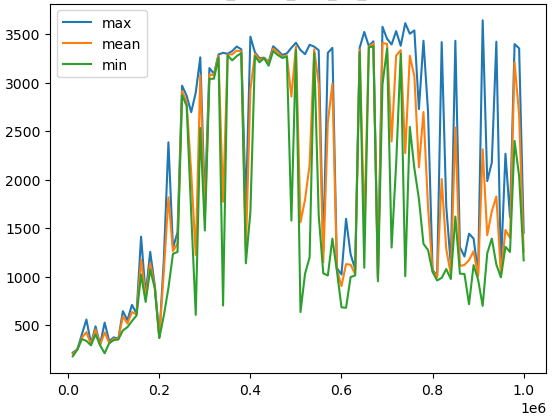
Mujoco Experiments. The figure reports average episodic rewards over ...
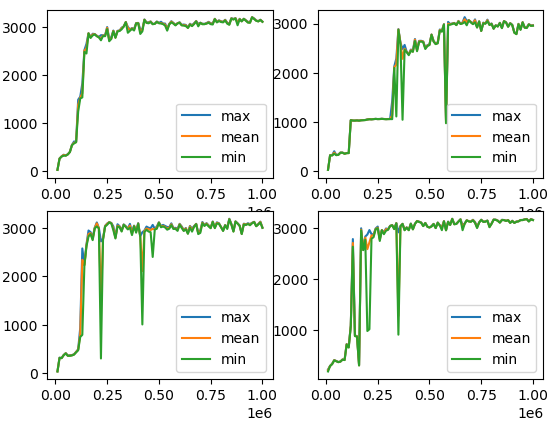
FIGURE Learning curves on six Mujoco environments. The horizontal axis ...
Results of each algorithm in MuJoCo test environment. (a) Hopper-v2 ...
Example MuJoCo environments (a)HalfCheetah-v2, (b)Ant-v2, (c)Hopper-v2 ...
Learning curves of our MPPVE (red) and other four baselines on MuJoCo ...
Deepmind open-sources MujoCo physics engine - The Robot Report
MuJoCo 全流程实战教程:从零搭建一个仿真实验-CSDN博客
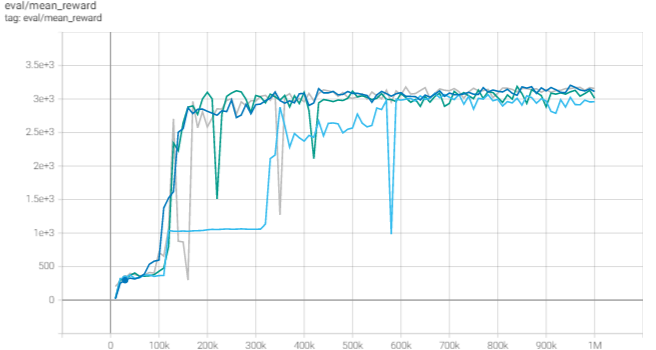
Evaluation curves for the set of MuJoCo and Box2D continuous control ...
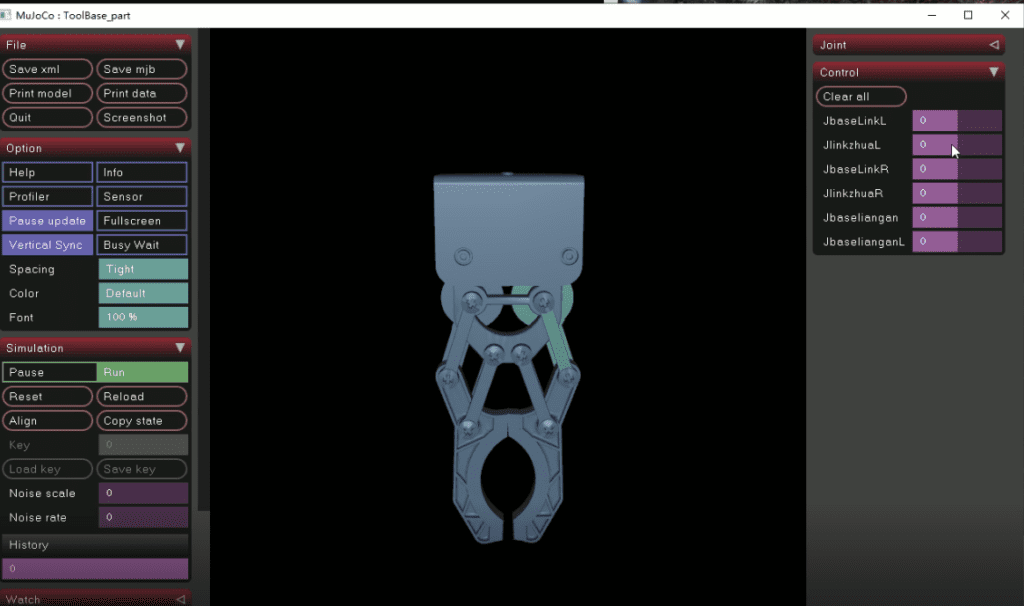
How to Design a Parallel Robot Gripper: iRobotCAM + MuJoCo Step-by-Step ...
MuJoCo 具身智能实战系列①|Ubuntu22.04系统上的本地部署 - 知乎
Additional results on continuous control MuJoCo environments -Reacher ...
MuJoCo — DI-engine 0.1.0 documentation
Hopper - Gymnasium-Robotics Documentation
[Question] SAC performance on Hopper (mujoco) · Issue #343 · DLR-RM/rl ...
MuJoCo games: Ant-v2, HalfCheetah-v2, Hopper-v2, Reacher-v2 ...
Mujoco 入门教程系列 - 知乎
DeepMind Releases MuJoCo Menagerie, Collection Of Simulated Robots For ...
Results of Averaged-SAC and SAC in 6 MuJoCo games. (a) Ant-v2. (b ...
GitHub - mcgill-robotics/Humanoid-MuJoCo: MuJoCo Simulation for ...
MuJoCo 画出机械臂末端轨迹进行可视化(附代码)_机械臂数据可视化-CSDN博客
Mujoco 学习系列(四)官方模型仓库 mujoco_menagerie-海口c网
REx Hopper
Illustration of each MuJoCo environment. From left to right: Ant ...
| MuJoCo-simulated environments: Hopper-v2, Walker2D-v2,... | Download ...
Gym-Mujoco tasks: half-cheetah, hopper, walker2d (left to right) Figure ...
GitHub - LC-dev/MuJoCo-Hopper-v2: McGill University COMP579 final ...
D4RL (MuJoCo) — DI-engine 0.1.0 documentation
GitHub - nitinjakhar/MuJoCo-to-train-our-humanoid-using-Humanoid-v5 ...
mujoco学习记录-1_mujoco加外力-CSDN博客
Linux系统 Ubuntu18.04 成功安装Mujoco、mujoco_py 详细步骤、安装教程(也可在虚拟环境中安装Mujoco ...
ubunt18.04安装mujoco,mujoco_py教程_mujoco官网-CSDN博客
技术分享:Franka机器人在仿真平台Mujoco的使用_franka urdf-CSDN博客
DDPG-Hopper-Mujoco-/DDPG_Hopper.ipynb at main · ShararehY/DDPG-Hopper ...
mujoco强化学习模拟环境的安装(windows10)_mujoco是32位还是64位_芋圆526的博客-CSDN博客
andrewzhang505/sample-factory-2-mujoco-hopper · Hugging Face
MattStammers/appo-mujoco_hopper-approaching_sota · Hugging Face
PNP技术教程之1——Mujoco入门:手把手教你Ubuntu安装、机械臂模型与末端位置追踪 - PNP机器人具身智能|具身方案|机器人|灵巧手
edbeeching/prj_gia_dataset_mujoco_hopper_1111 at main
The Gym-Mujoco and Adroit environments considered by the D4RL branch of ...
mujoco_playground/mujoco_playground/_src/dm_control_suite/hopper.py at ...
GitHub - qingshi9974/PPO-pytorch-Mujoco: Implement PPO algorithm on ...
Mujoco基本情况介绍-CSDN博客
强化学习:MuJoCo机器人强化学习仿真入门(1)
基于Mujoco强化学习机器人控制平台部署_learning humanoid walking部署-CSDN博客
GitHub - seolhokim/Mujoco-Pytorch: PPO, DDPG, SAC implementation on ...
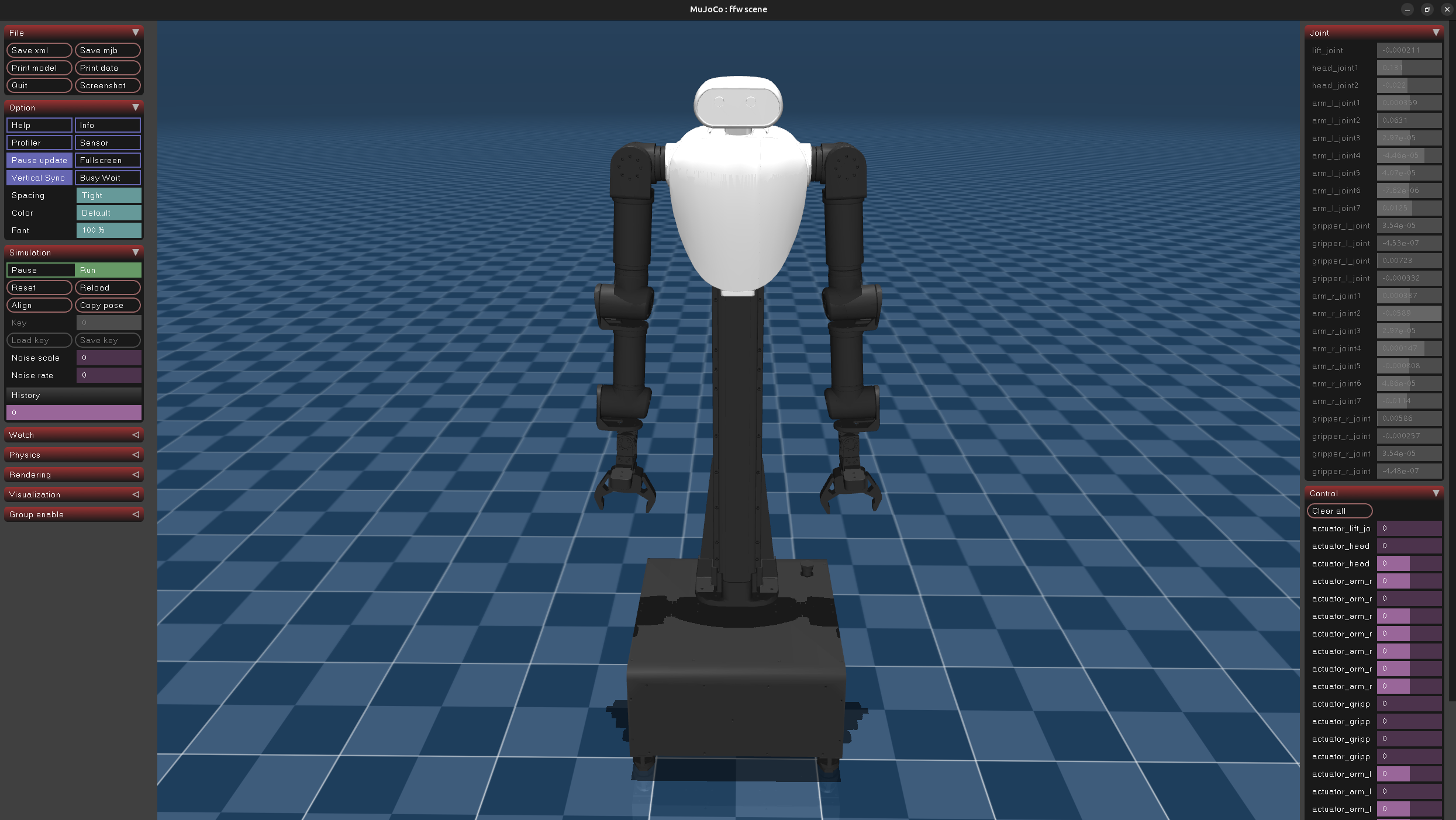
Physical AI 之 AI Worker - 採智科技網站v2
MuJoCO仿真(1) MuJoCo210 Win10安装-CSDN博客
Simulation | ROBOTIS
强化学习环境——Mujoco安装 - 知乎
MuJoCoを使ってみる その1(環境構築、サンプルプログラムの実行) - 趣味的ロボット研究所
A visualization of our simulation in Mujoco. In simulation the gripper ...
MuJoCo: 先进的物理仿真引擎 - 懂AI
MuJoCo机器人动力学仿真平台安装与教程_mujoco安装教程-CSDN博客
unstable_baselines/unstable_baselines/baselines/td3/configs/mujoco ...
Full article: Empirical study of privacy inference attack against deep ...
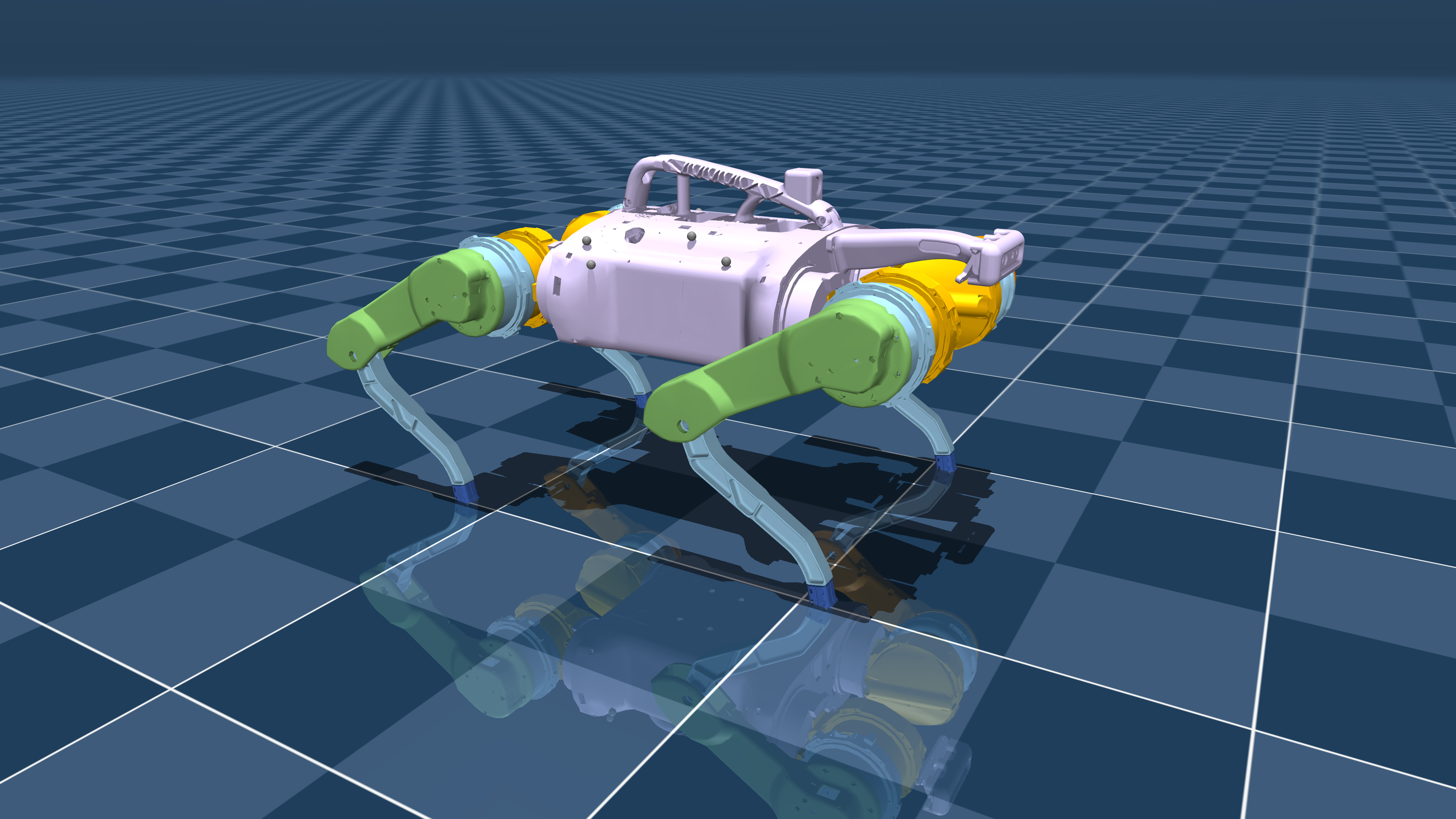
AI Agents Enter Reality as Robots via Sim2Real | Mike Kalil
Mujoco仿真【xml文件的学习 1】-CSDN博客
(PDF) MuJoCo: A physics engine for model-based control
【教程】2025新版mujoco建模与仿真——simulate工具使用 - 哔哩哔哩
Bio-Inspired Myriapod Robot | Project 02
GitHub - pjhae/Mujoco_walkingRobots
如何在ubuntu20.04安装mujoco - 知乎
Robot models are used for locomotion experiments based on OpenAI Gym ...
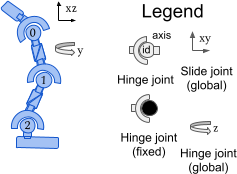
自分のロボットをMuJoCoでシミュレーションしよう!CADからMJCFを作る方法 | Yasunori Toshimitsu 利光泰徳
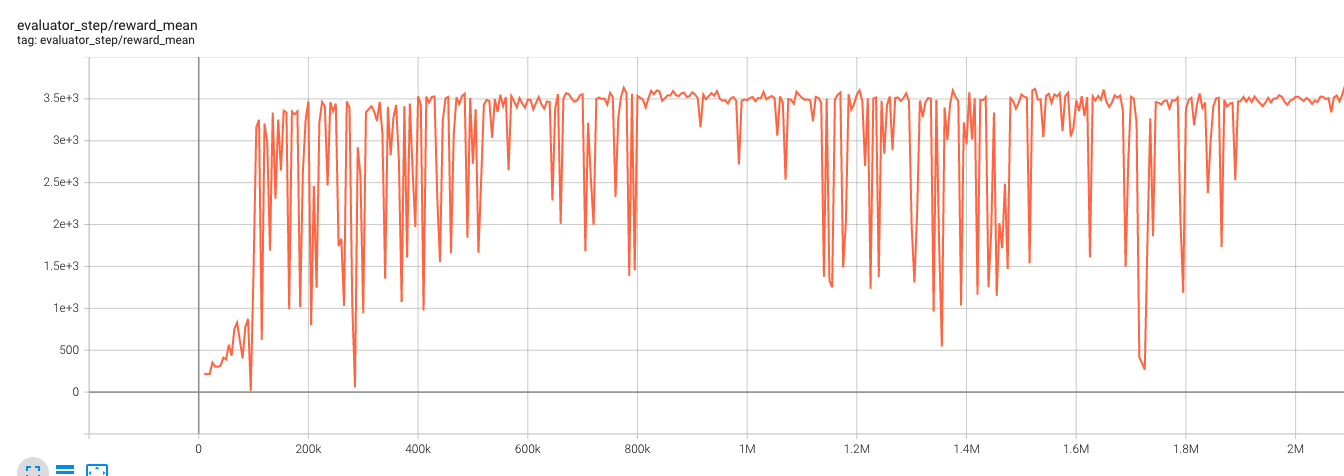
OpenDILabCommunity/Hopper-v3-TD3 · Hugging Face