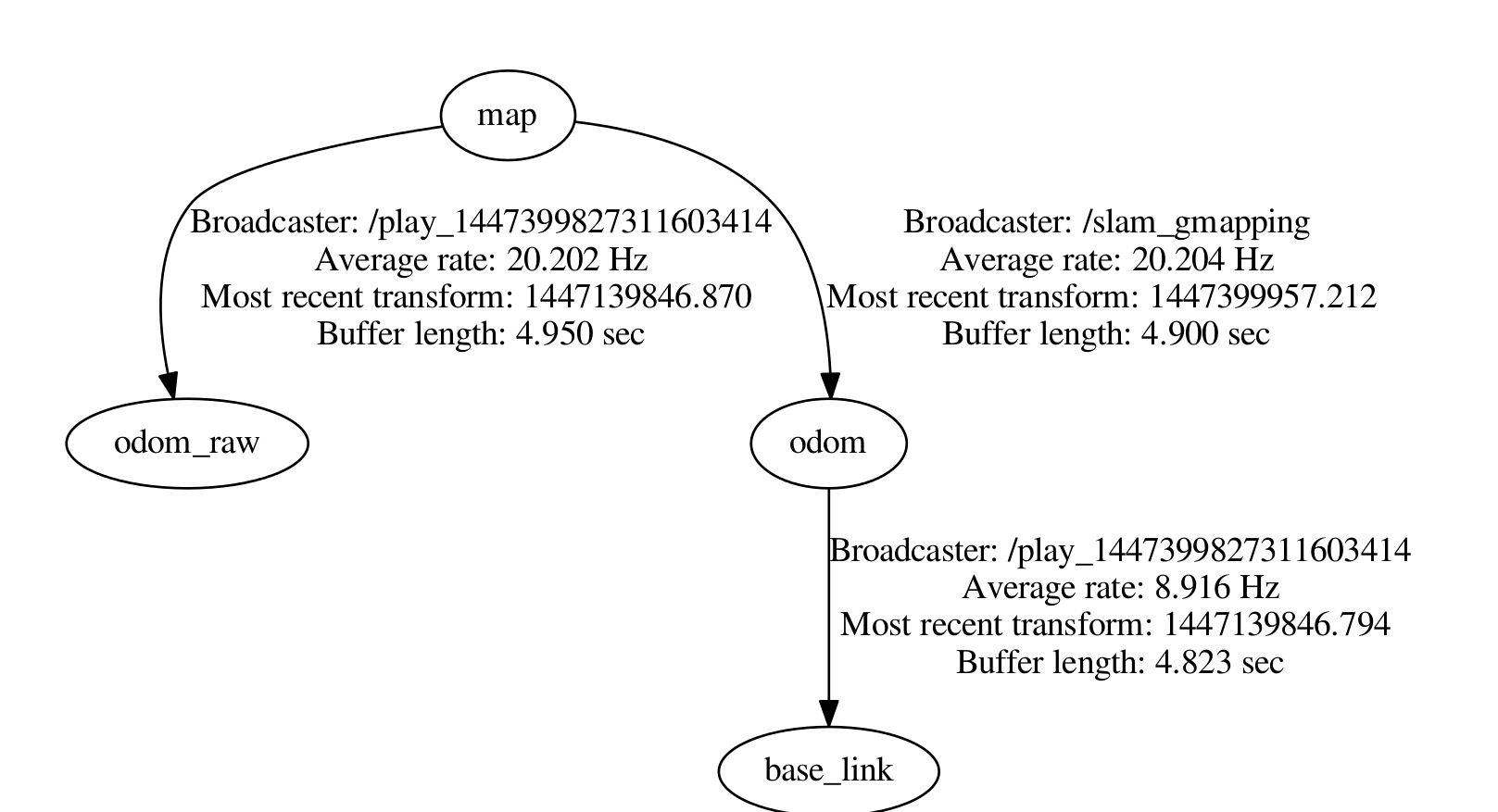
Showing 120 of 120on this page. Filters & sort apply to loaded results; URL updates for sharing.120 of 120 on this page
Why odom frame will move away from map frame? - ROS Answers archive
ros - How to transform given latitude and longitude data to map frame ...
ros melodic - Failed to transform the goal pose from map to map frame ...
ros kinetic - How to add parent frame map? Map not exists - Robotics ...
map is separated from its frame - ROS Answers archive
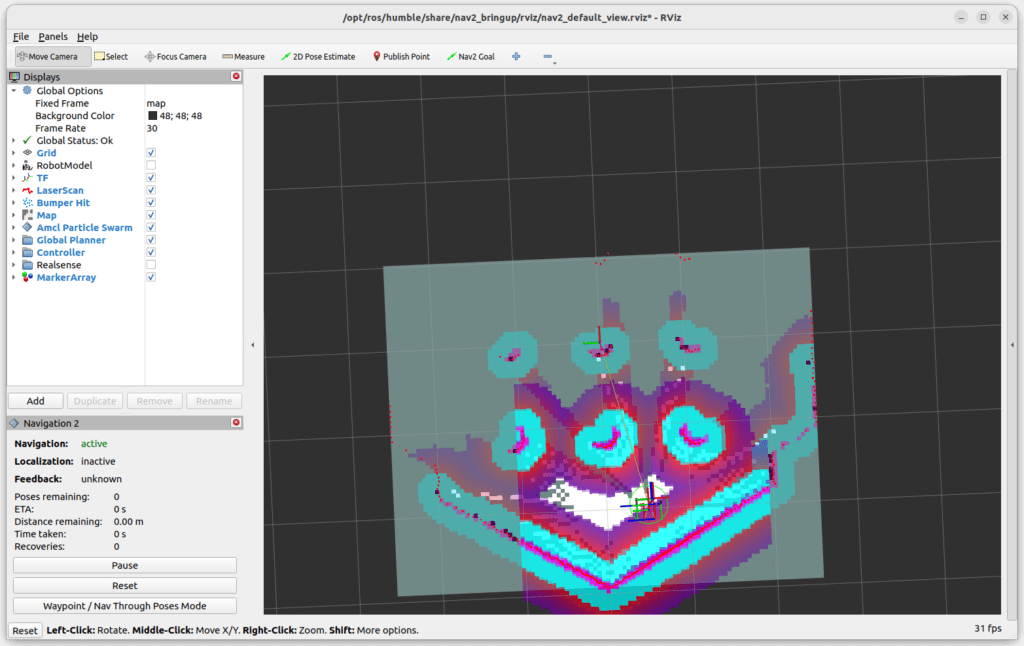
Ros Navigation Isaac example no transform robot frame to map - Isaac ...
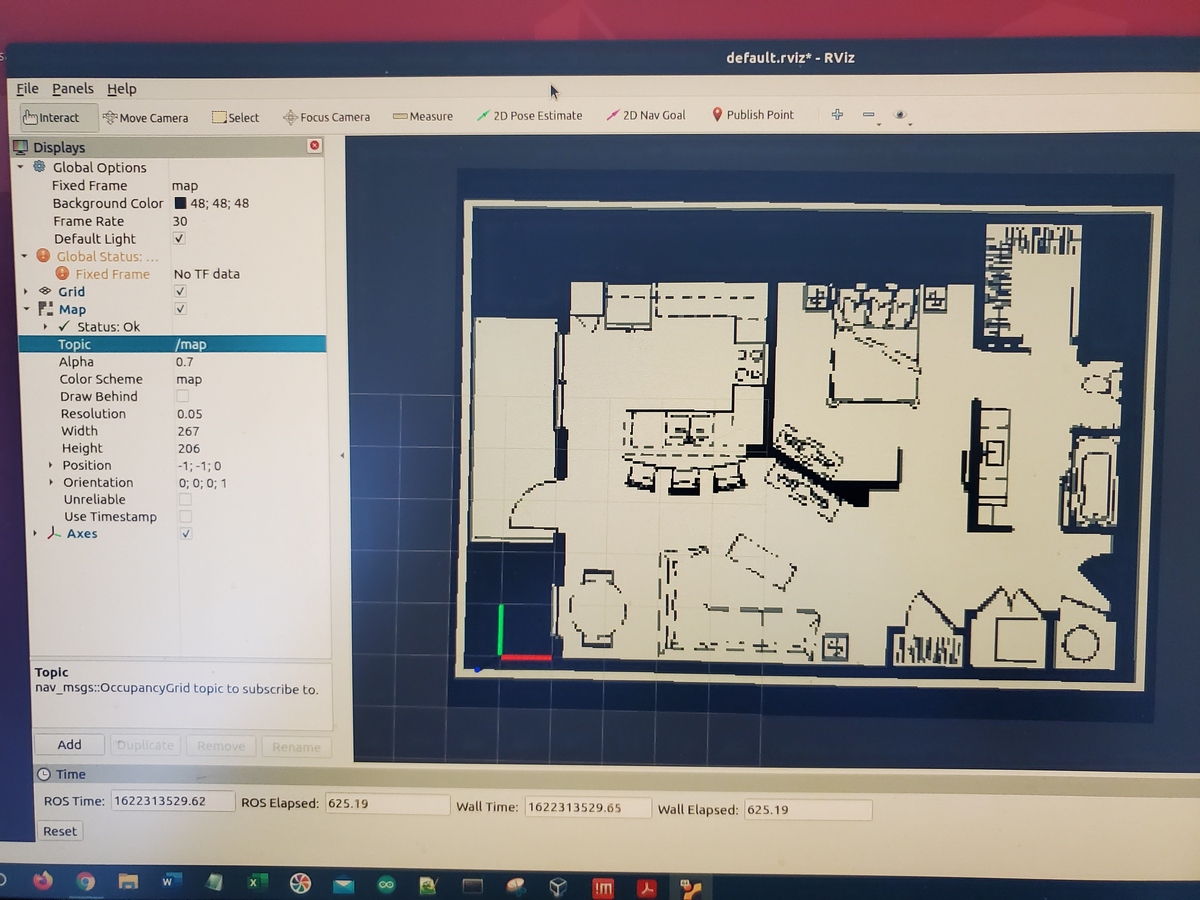
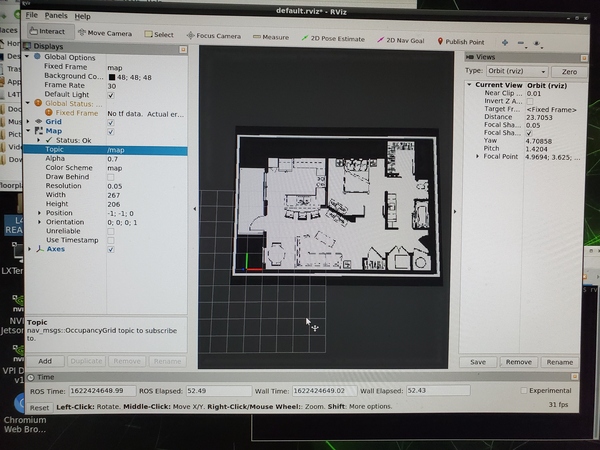
ros - Problem with gmapping and rviz: "No map received" & "Fixed frame ...
Convert Depth Image into PointCloud2 in Map frame. Realtime ROS - YouTube
Base_Link, Map and Odom all static using ROS Navstack? - ROS Answers ...
no transformation between the base_footprint frame and the map frame ...
ROS architecture of the experiments. a The system coordinate frame ...
initial orientation of the map frame · Issue #1218 · cartographer ...
ROS node map for pointing and observing robotic agents. A ...
Google Cartographer providing map frame with 180º rotation about x axis ...
How to publish a map frame? - ROS Answers archive
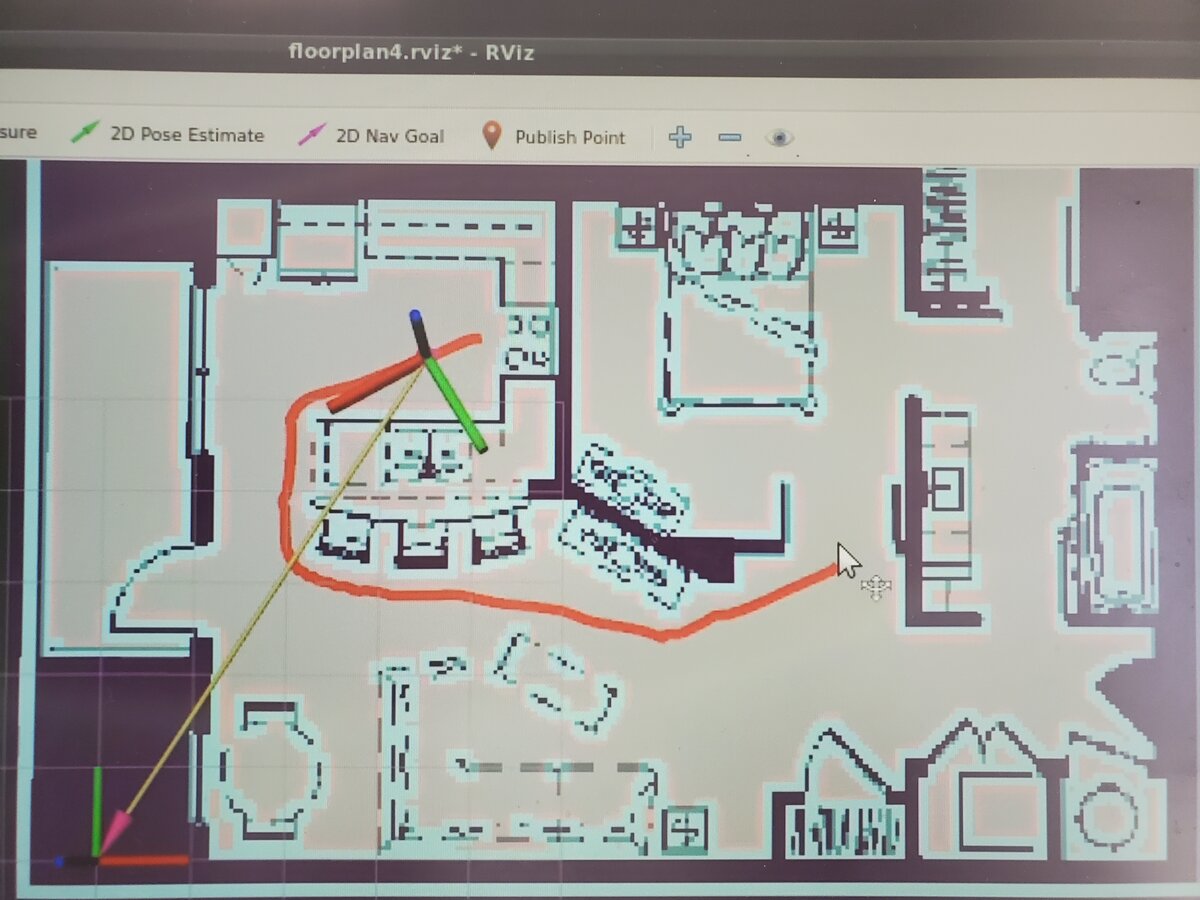
How to Create a Map for ROS From a Floor Plan or Blueprint
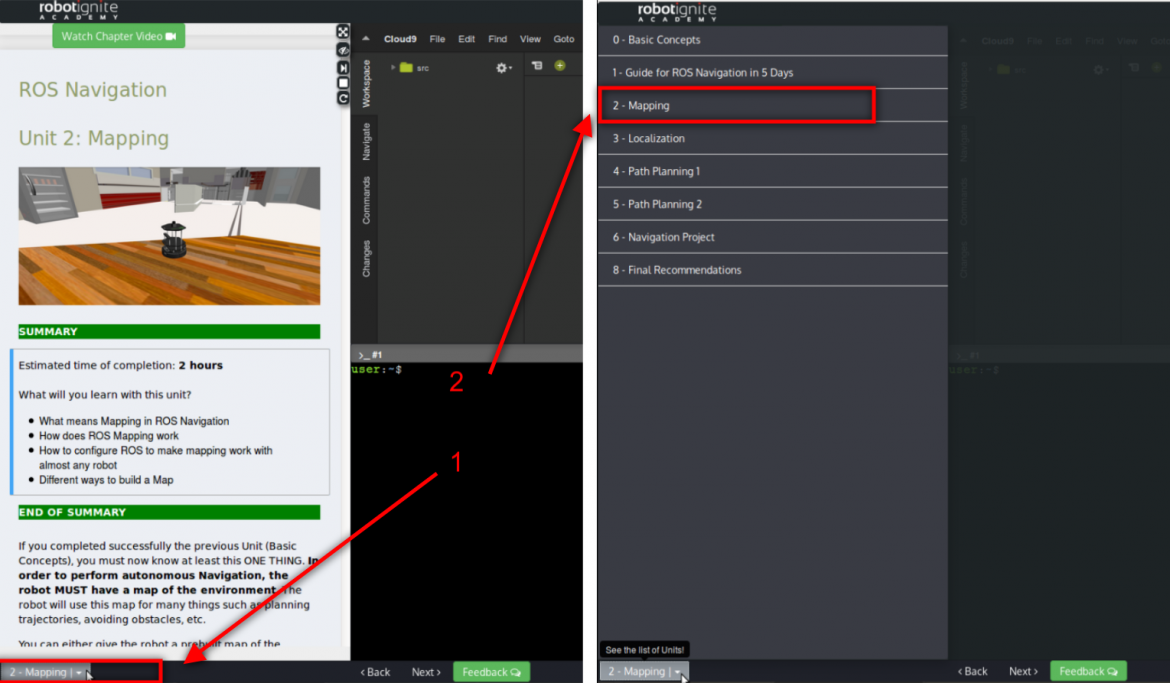
[ROS Q&A] 119 - ROS Mapping Tutorial. How To Provide a Map - YouTube
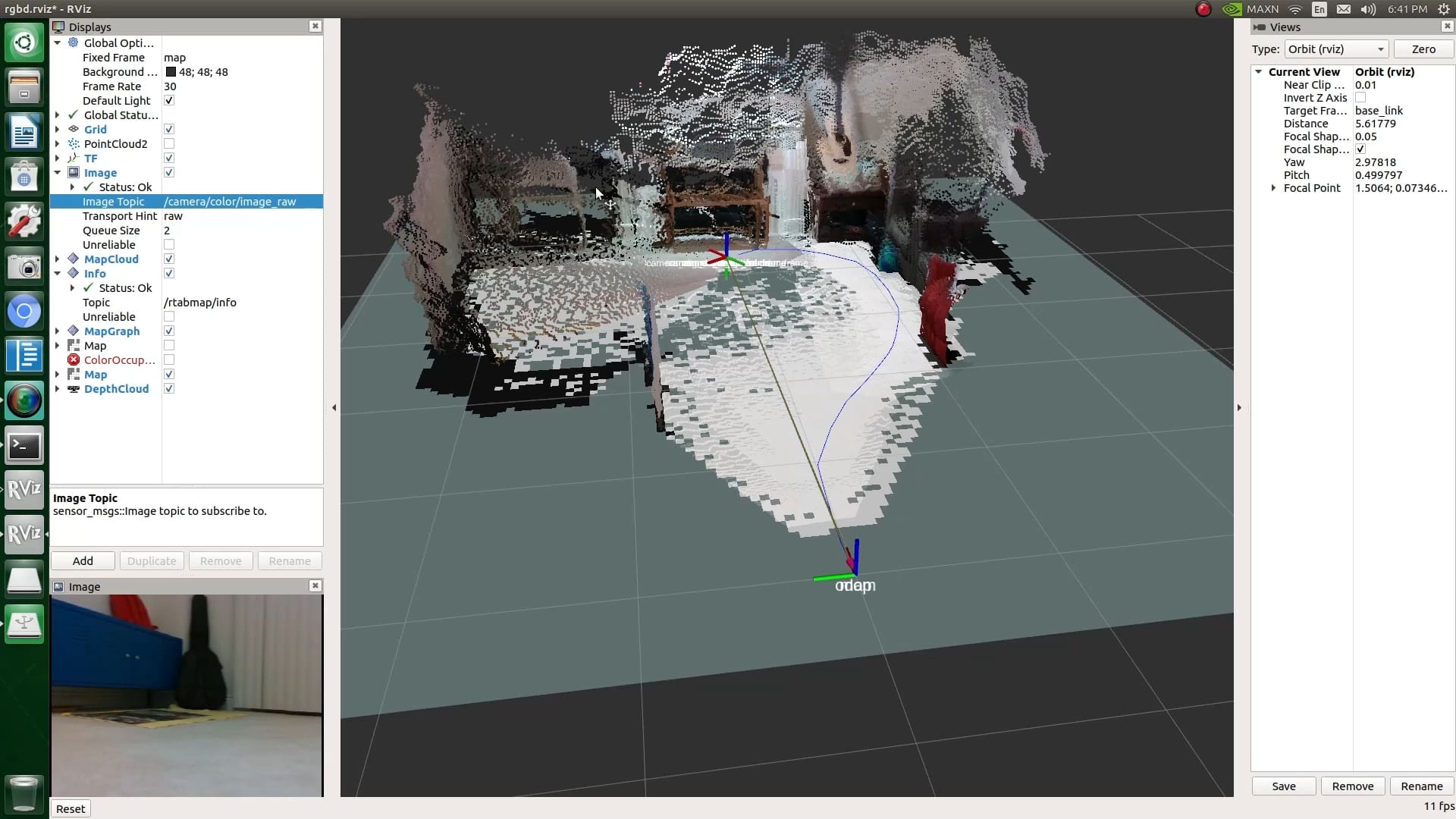
Direction of Map frame using rgbd with IMU SLAM · Issue #910 · introlab ...
[ROS in 5 mins] 023 - Understanding ROS Coordinate Frame (Part 1) - The ...
What is Mapping in robotics? How to create Map in Ros | by Mansoor Alam ...
New Launched AI Kit for ROS Map Navigation Learning - ROS General ...
Map drawn under the ROS system | Download Scientific Diagram
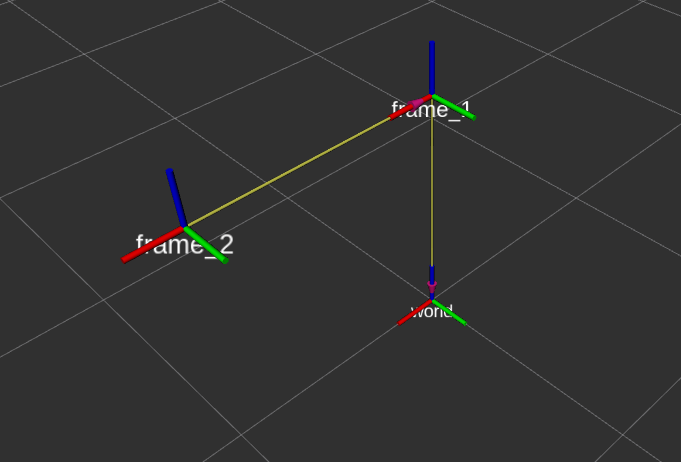
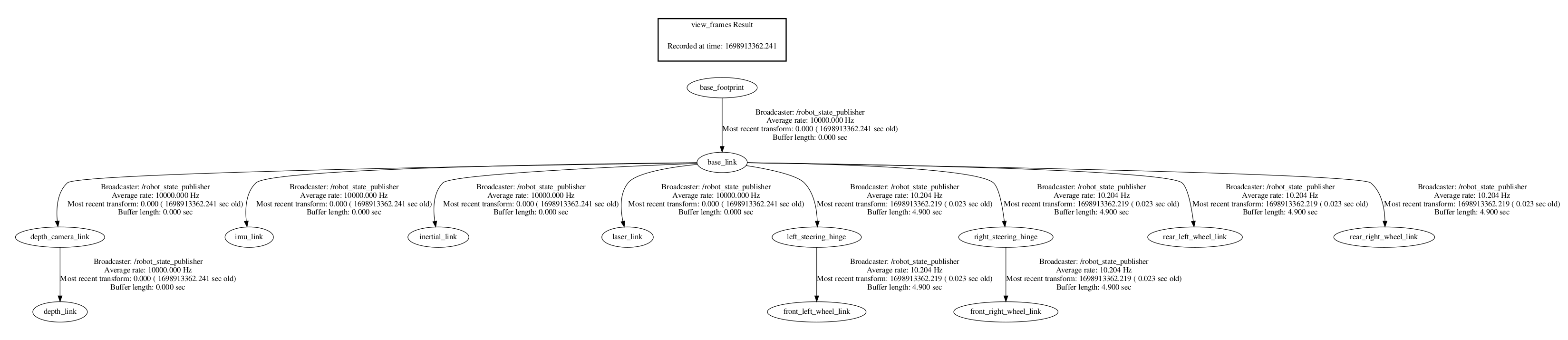
Describing frame relations with URDF - FE ROS
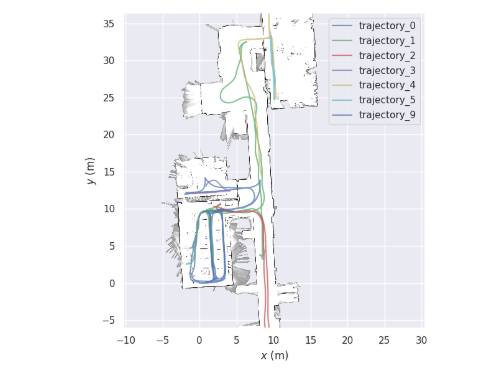
轨迹评估工具使用总结(二) evo 绘图& ROS map - 灰信网(软件开发博客聚合)
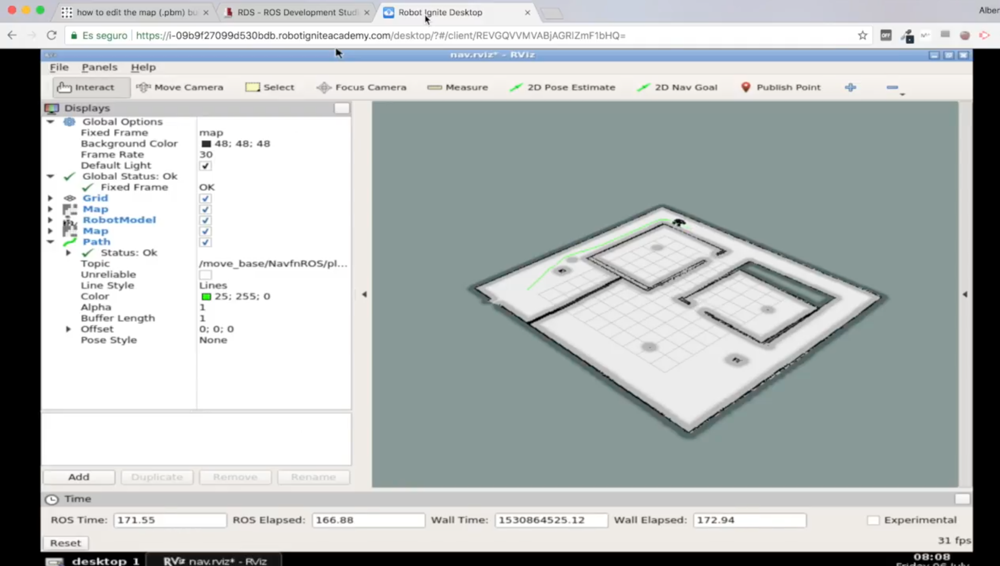
[ROS Q&A] 191 - How to load a pre-built map into ROS for the Navigation ...
No transform from [base_link] to frame [map] - ROS Answers archive
[ROS in 5 mins] 023 - Understanding ROS Coordinate Frame (Part 1) - YouTube
(A) Representative ROS image acquired at a frame speed of 500 fps. The ...
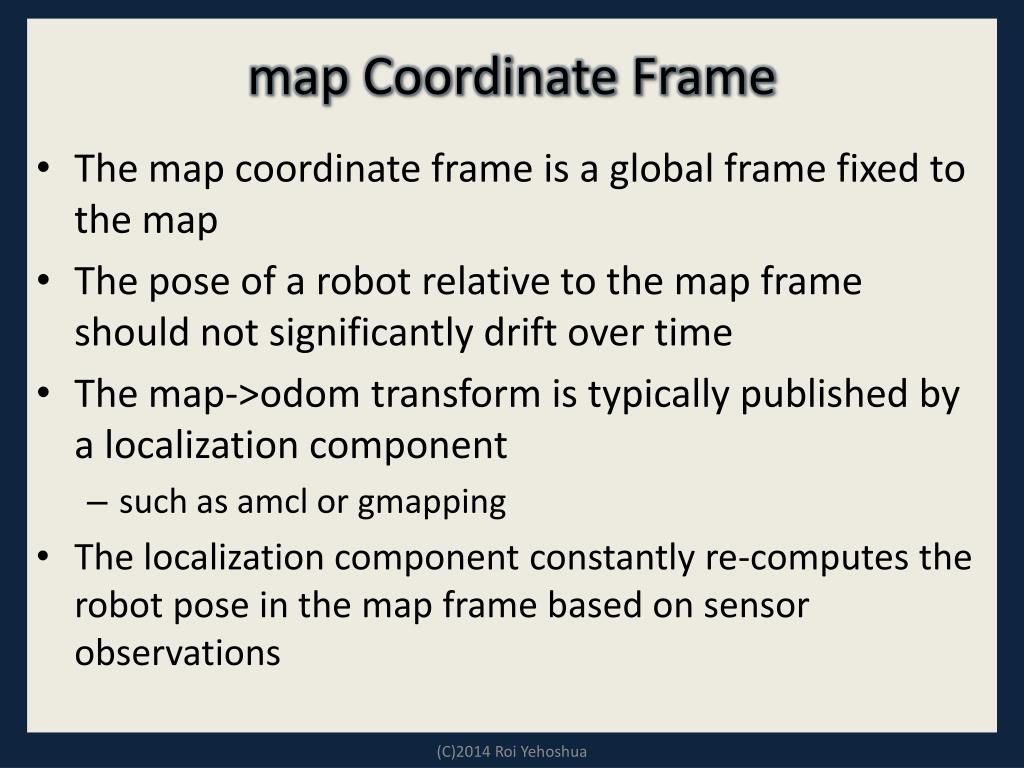
What are ROS frames? - basics overview: What are odom, map and world ...
ROS 2-Based Framework for Semi-Automatic Vector Map Creation in ...
How to create a ROS map using a buildings floorplan - YouTube
[ROS in 5 mins] 026 - Understanding ROS Coordinate Frame (Part 2) - YouTube
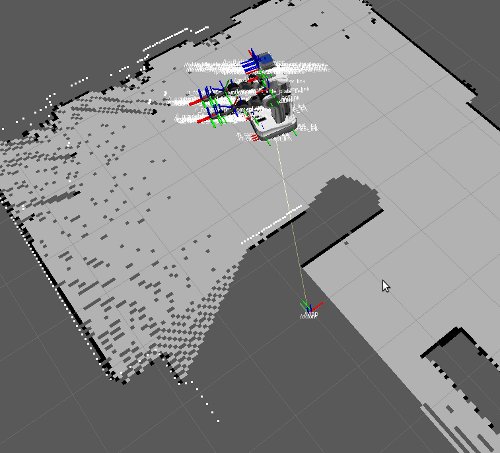
ros - slam gmapping Map is not updating when the robot moves - Robotics ...
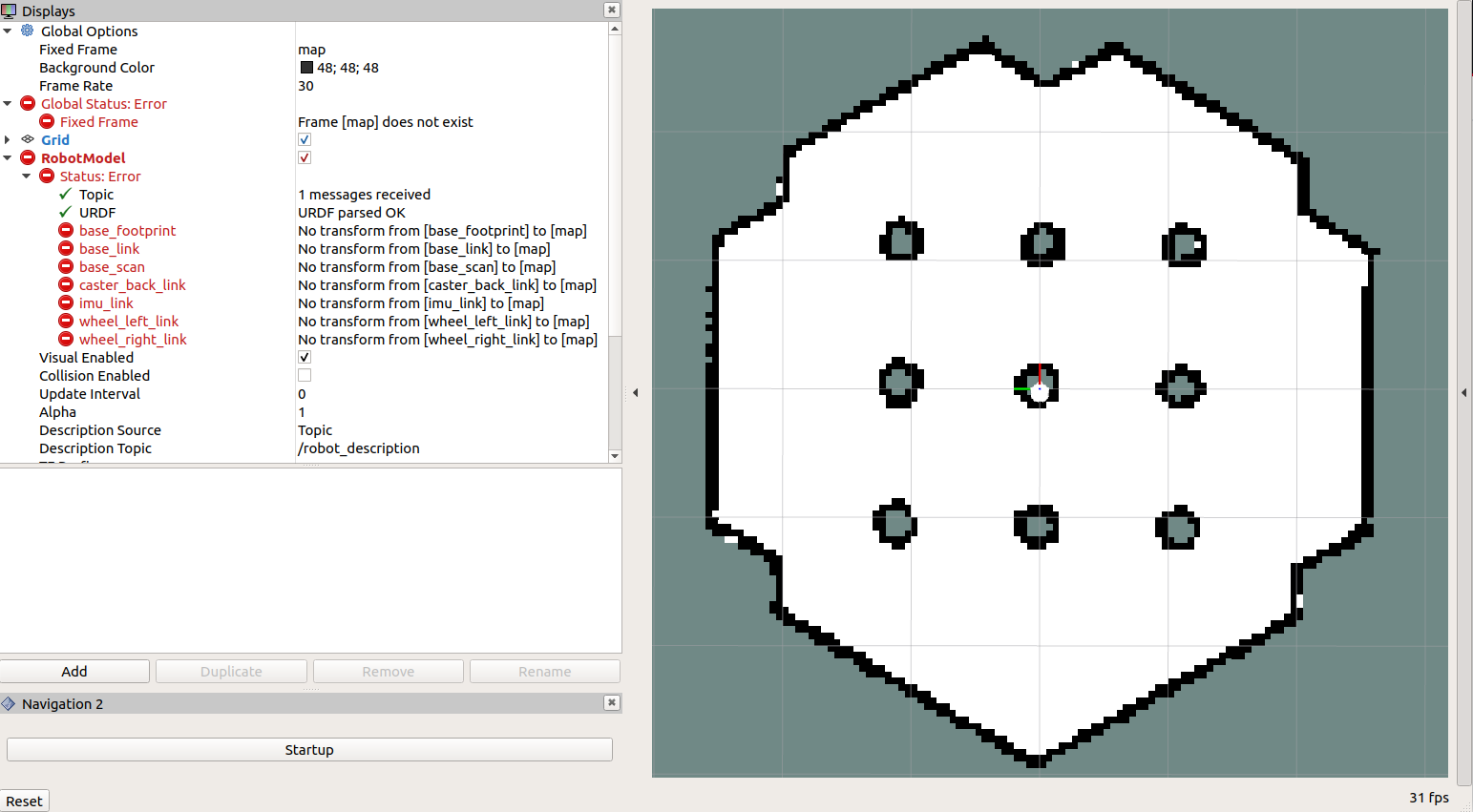
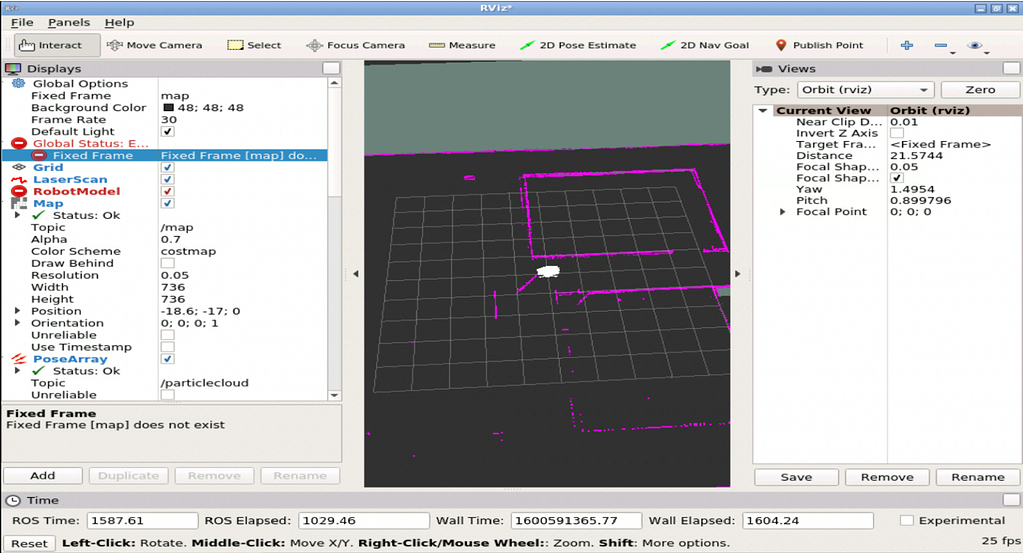
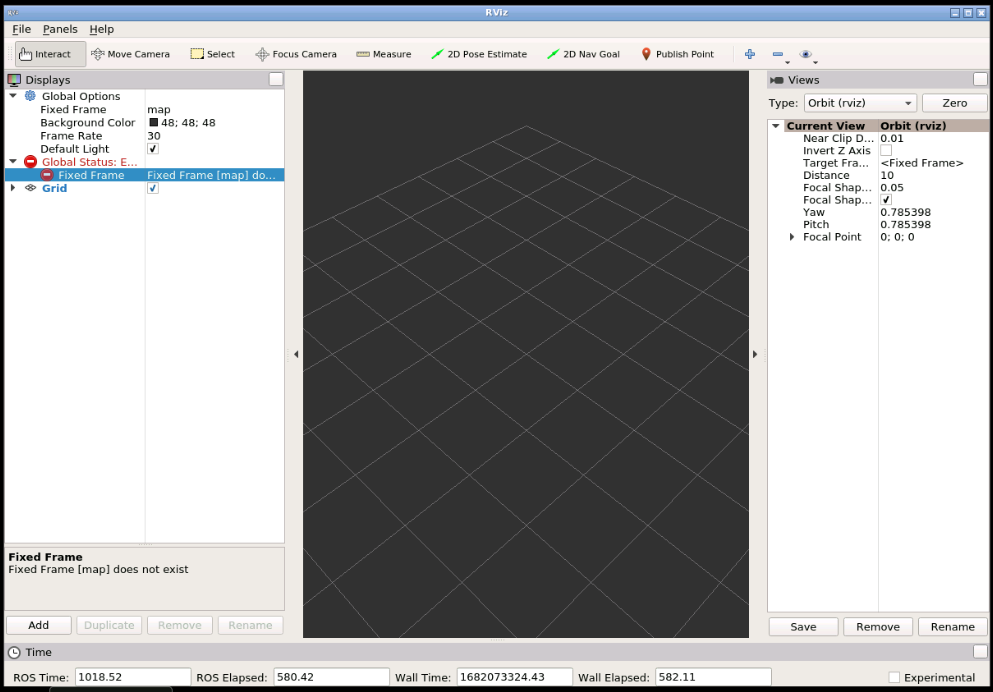
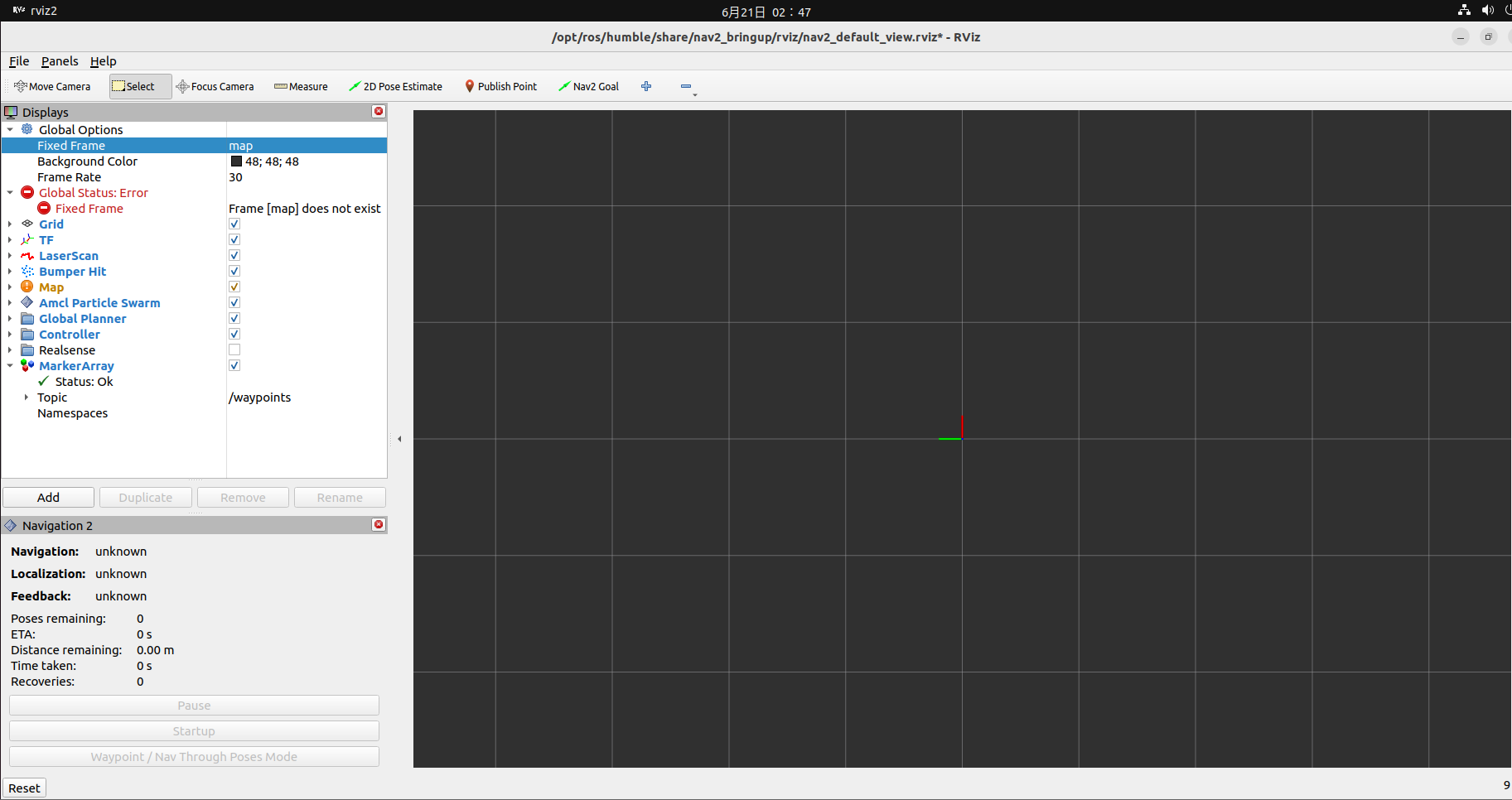
Course Project Step 2 Fixed Frame [map] does not exist - ROS Navigation ...
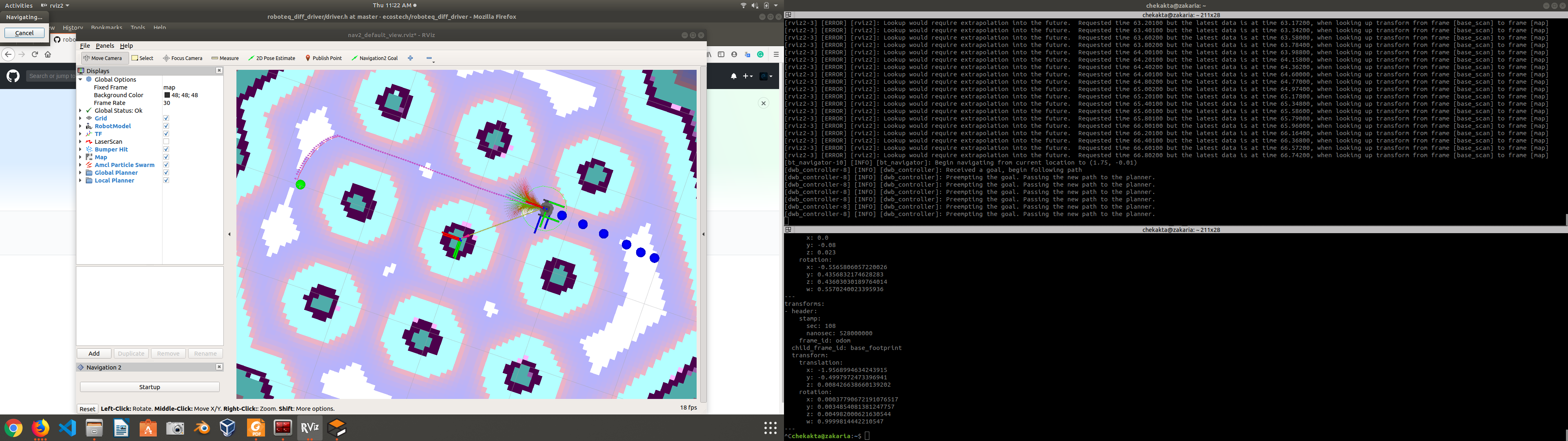
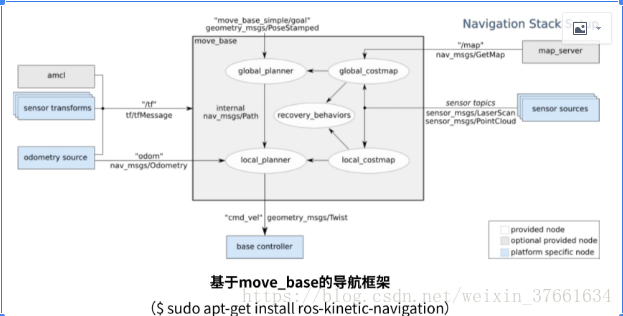
ROS导航——配置机器人的导航功能(move_base包)_ros map frame 与 global frame-CSDN博客
Fixed Frame [map] does not exist - General Support - The Construct ROS ...
How to Set Up the ROS Navigation Stack on a Robot
Use of base_footprint in ROS navigation - ROS Navigation In 5 Days ...
Nav2 ROS Actions | Clearpath Robotics Documentation
Real-Time Appearance-Based Mapping using ROS and an RGBD Camera - Quanser
ROS Transform · Issue #6 · agilexrobotics/bunker_ros · GitHub
Autonomous Navigation Using Ros at Susanne Lumpkin blog
ros - Correct use of transformations while using coordinate frames ...
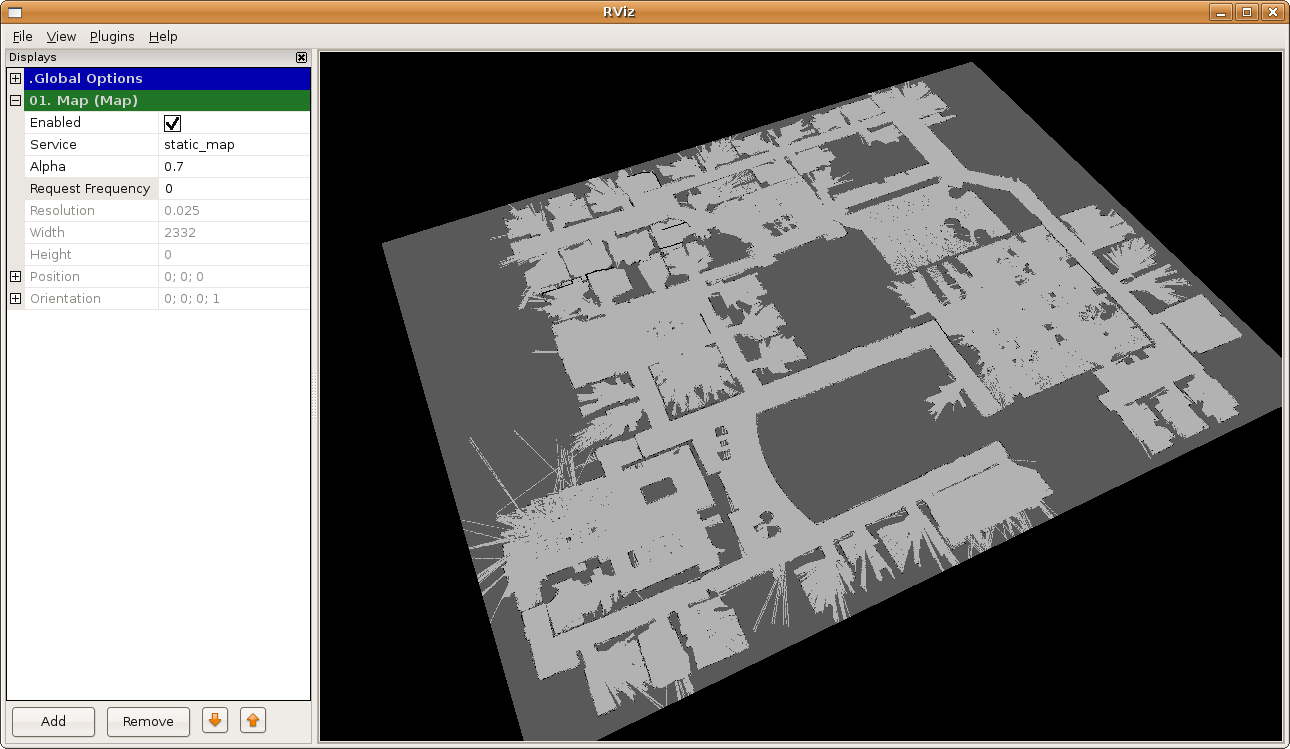
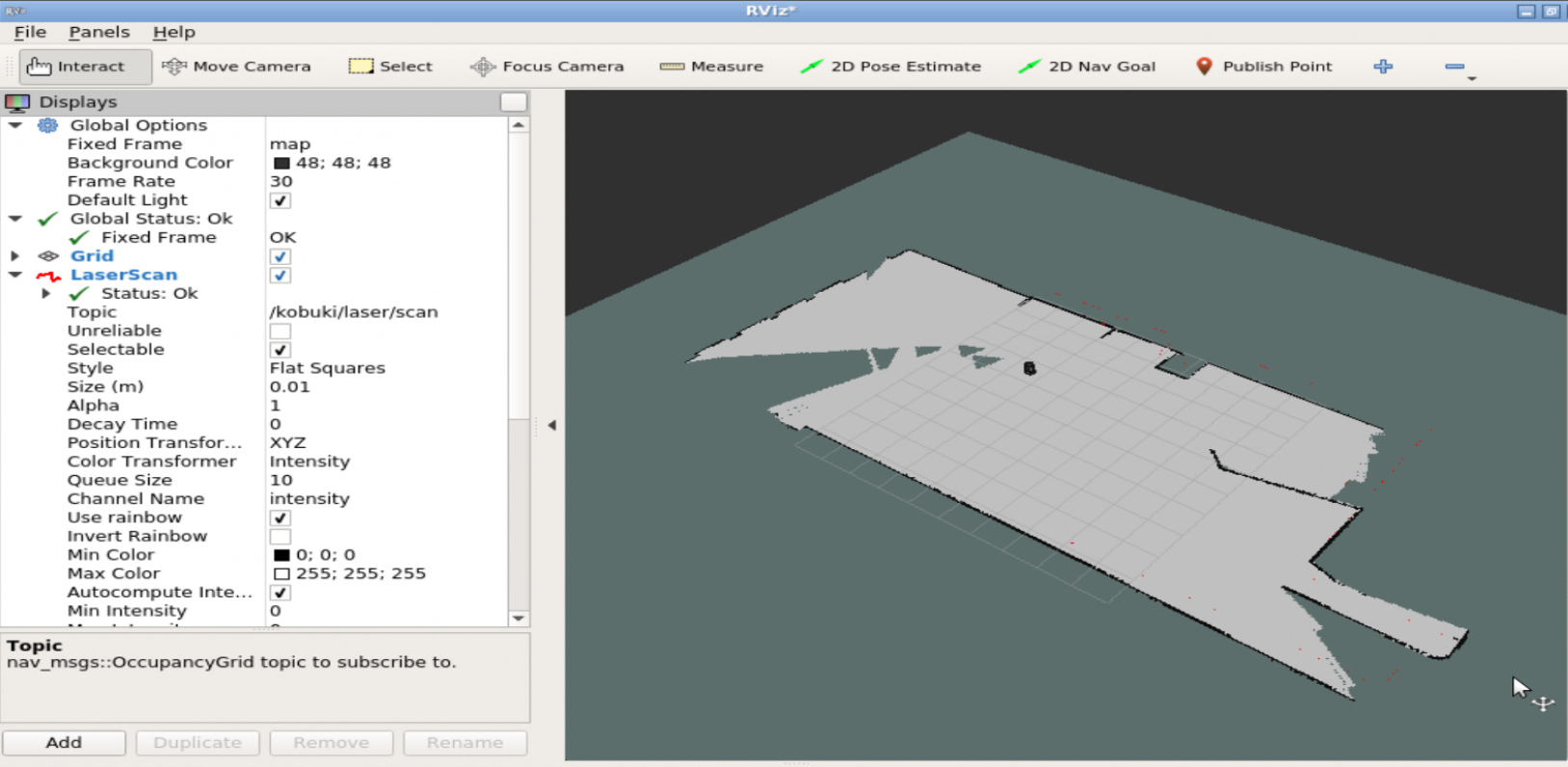
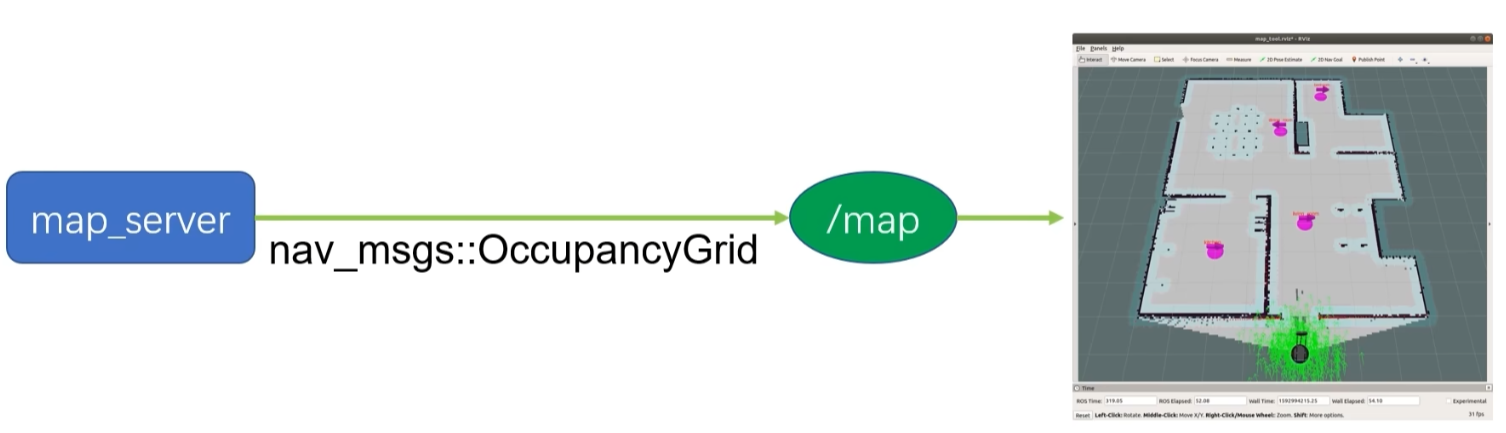
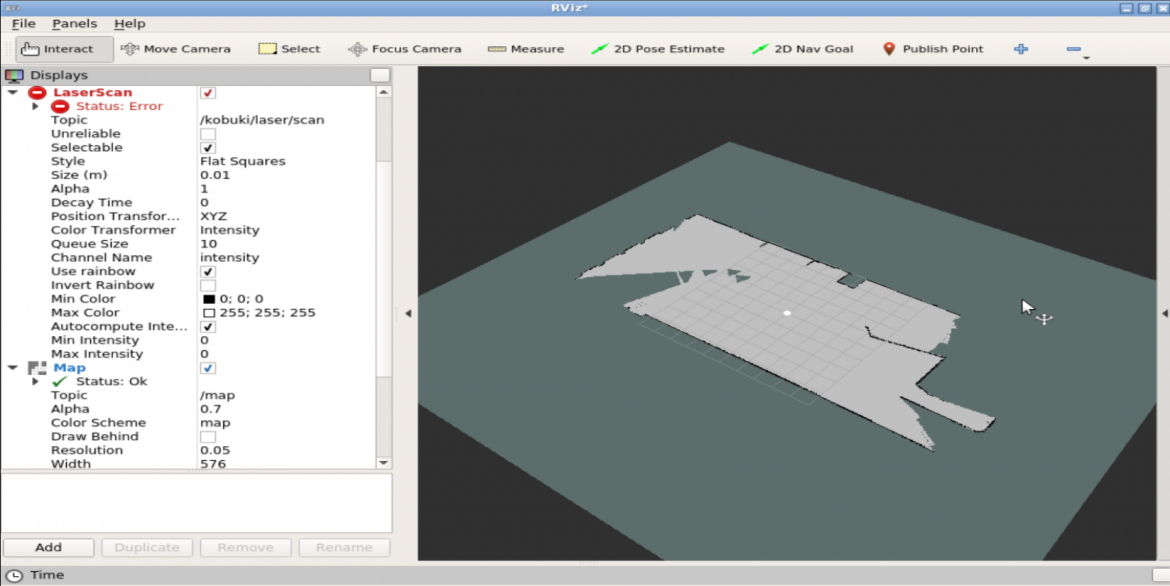
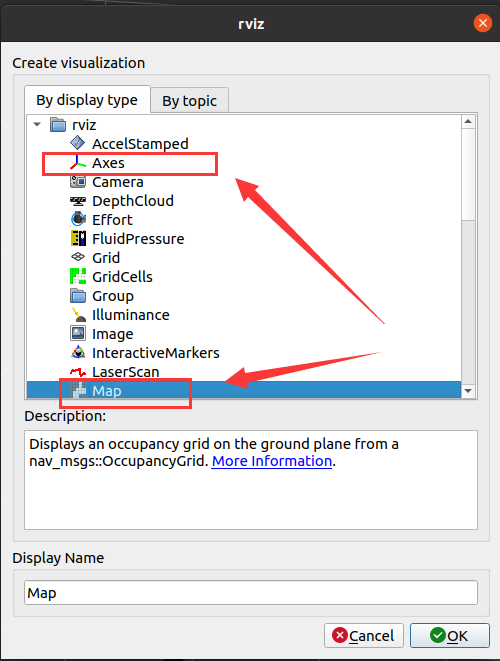
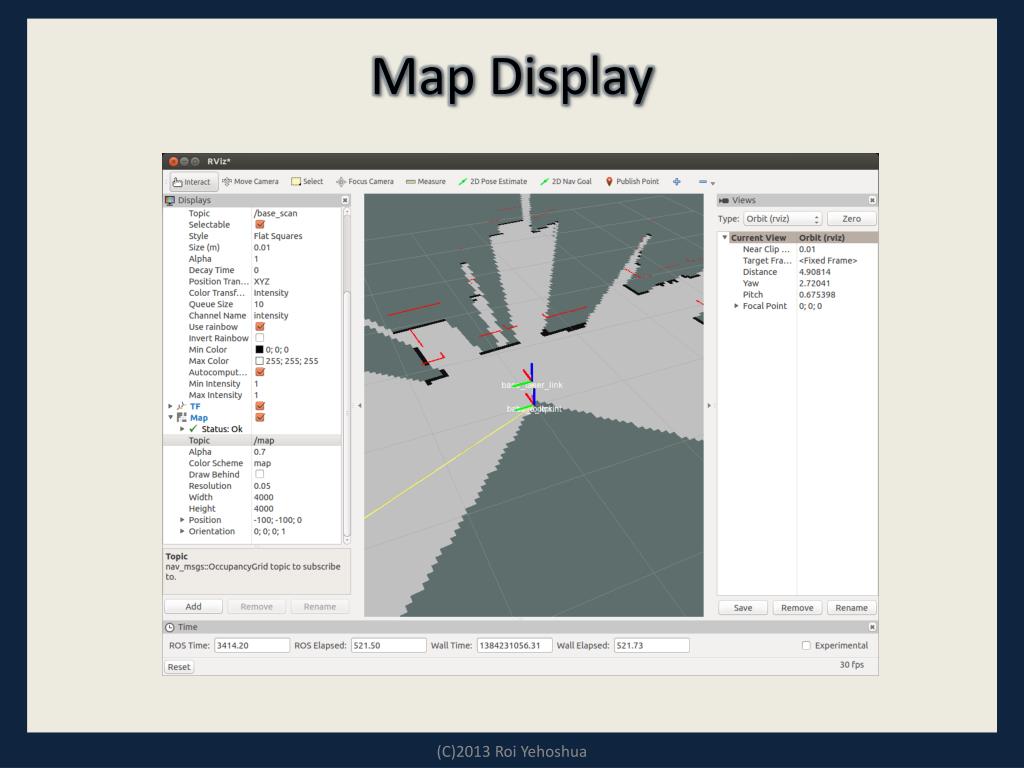
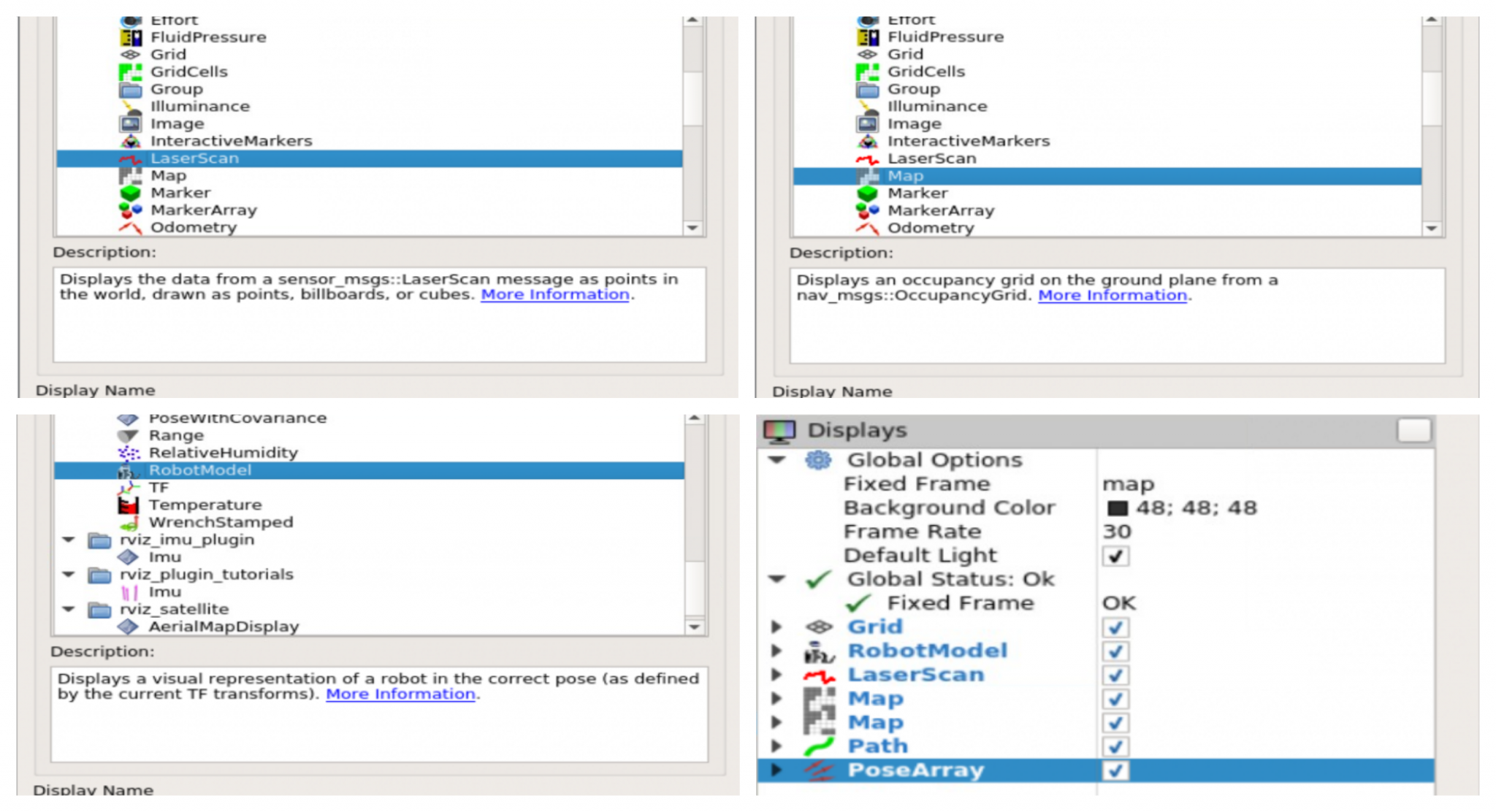
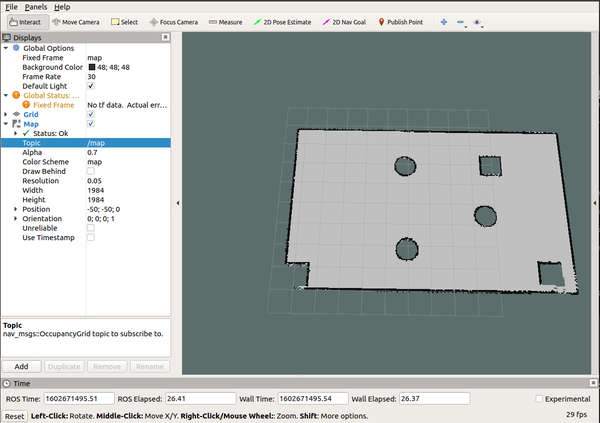
rviz/DisplayTypes/Map - ROS Wiki
ROS 2 Tutorials — Crazyswarm2 1.0a1 documentation
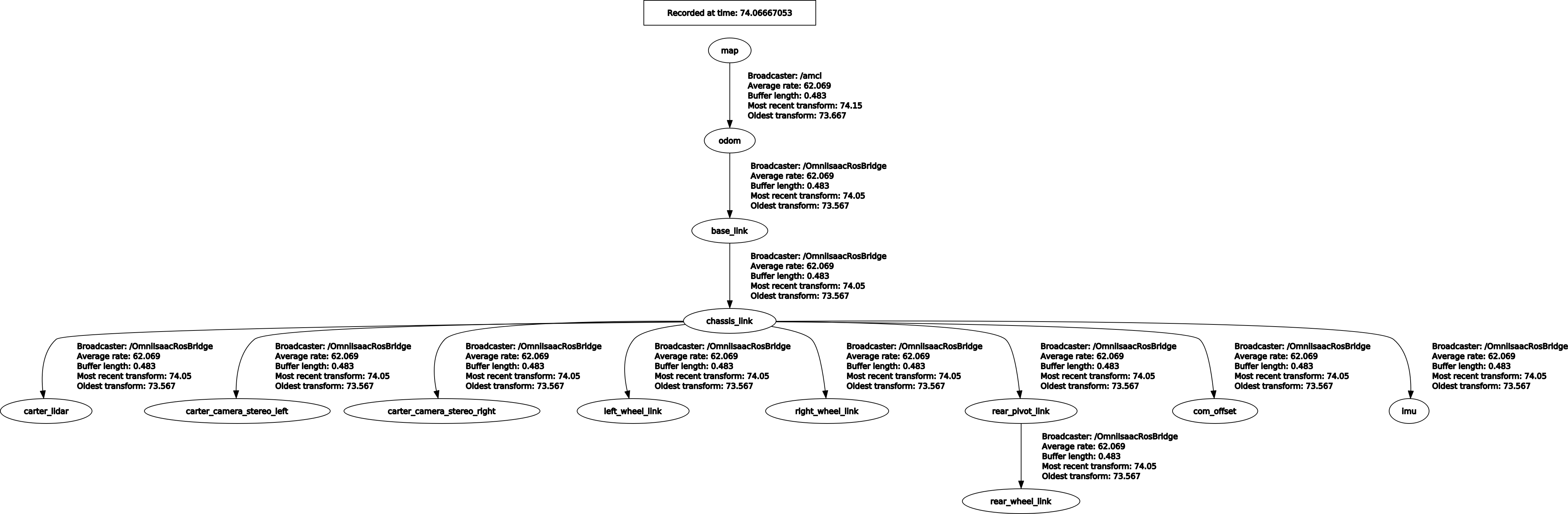
ROS2 Creating a world/map frame for odometry to reference - Isaac Sim ...
ROS2: Mapping and Navigation with AgileX Limo ROS2 - ROS General - Open ...
ROS 2 Tutorial 1 - Mapping using Google Cartographer - YouTube
[ROS Q&A] 119 - ROS Mapping Tutorial. Learn how To Provide a Map!
ROS 入门教程(含开发调试配置) – LRL52 的博客
Create ROS Nodes for Custom SLAM (Simultaneous Localization and Mapping ...
Tf2 — ROS 2 Documentation: Humble documentation
ros - how do i create a /map frame? - Robotics Stack Exchange
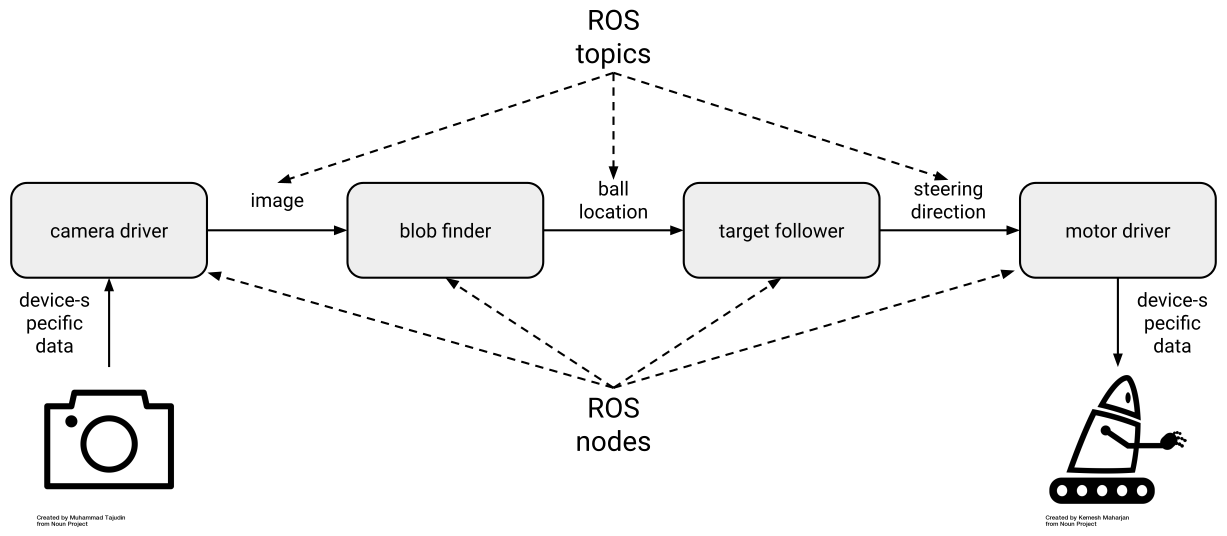
Overview of the ROS navigation stack. The different nodes and modules ...
SDF2MAP → Generate ROS 2D Maps Directly from GzSim Worlds - ROS General ...
PPT - Multi-Robot Systems with ROS Lesson 5 PowerPoint Presentation ...
ROS frames depicting path tracking and drift compensation of the UGV ...
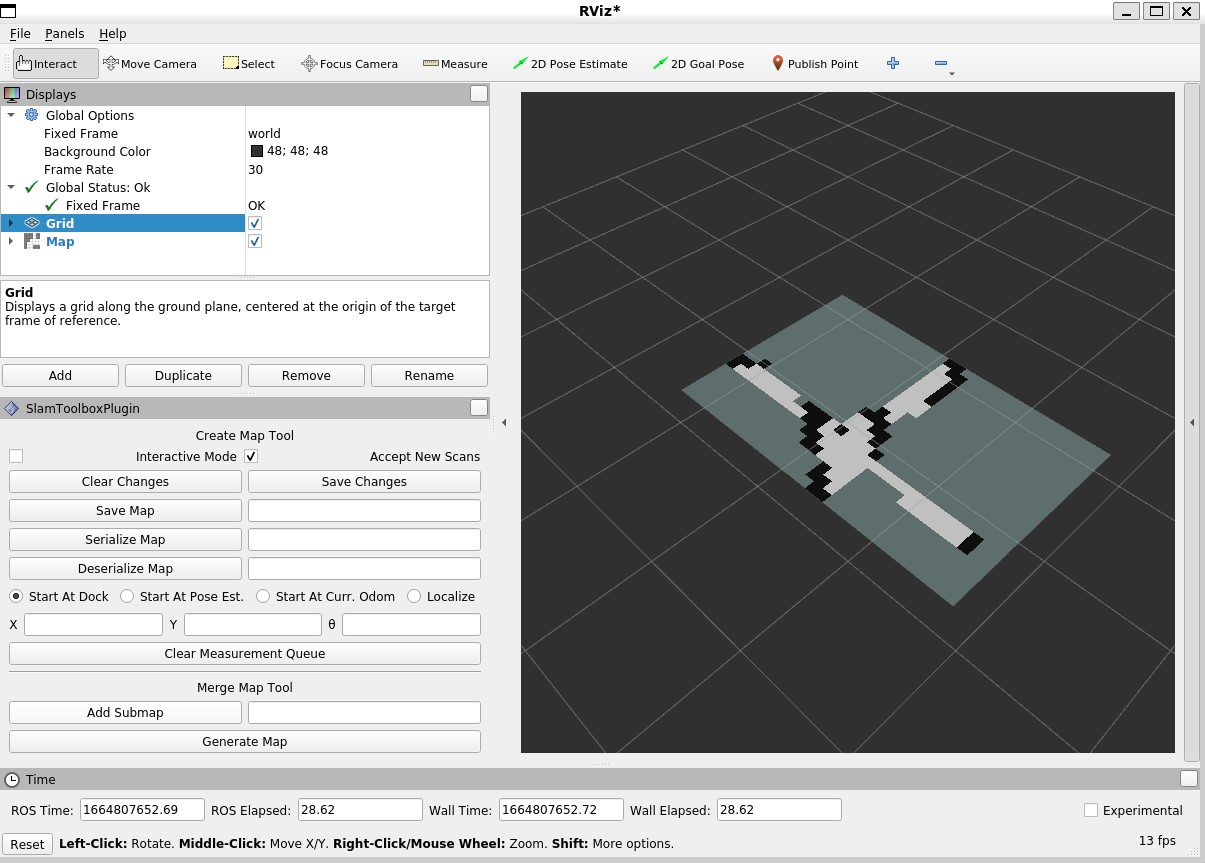
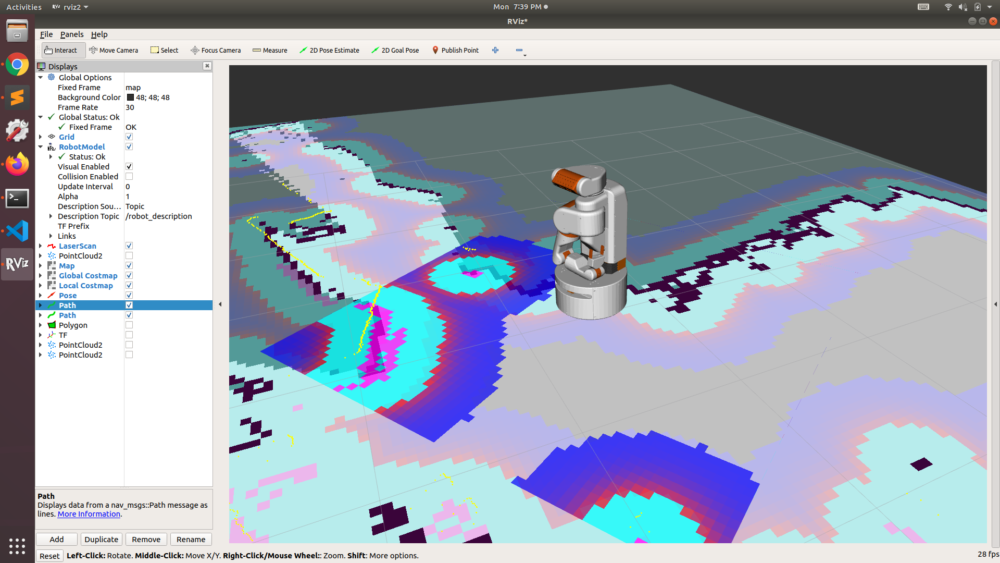
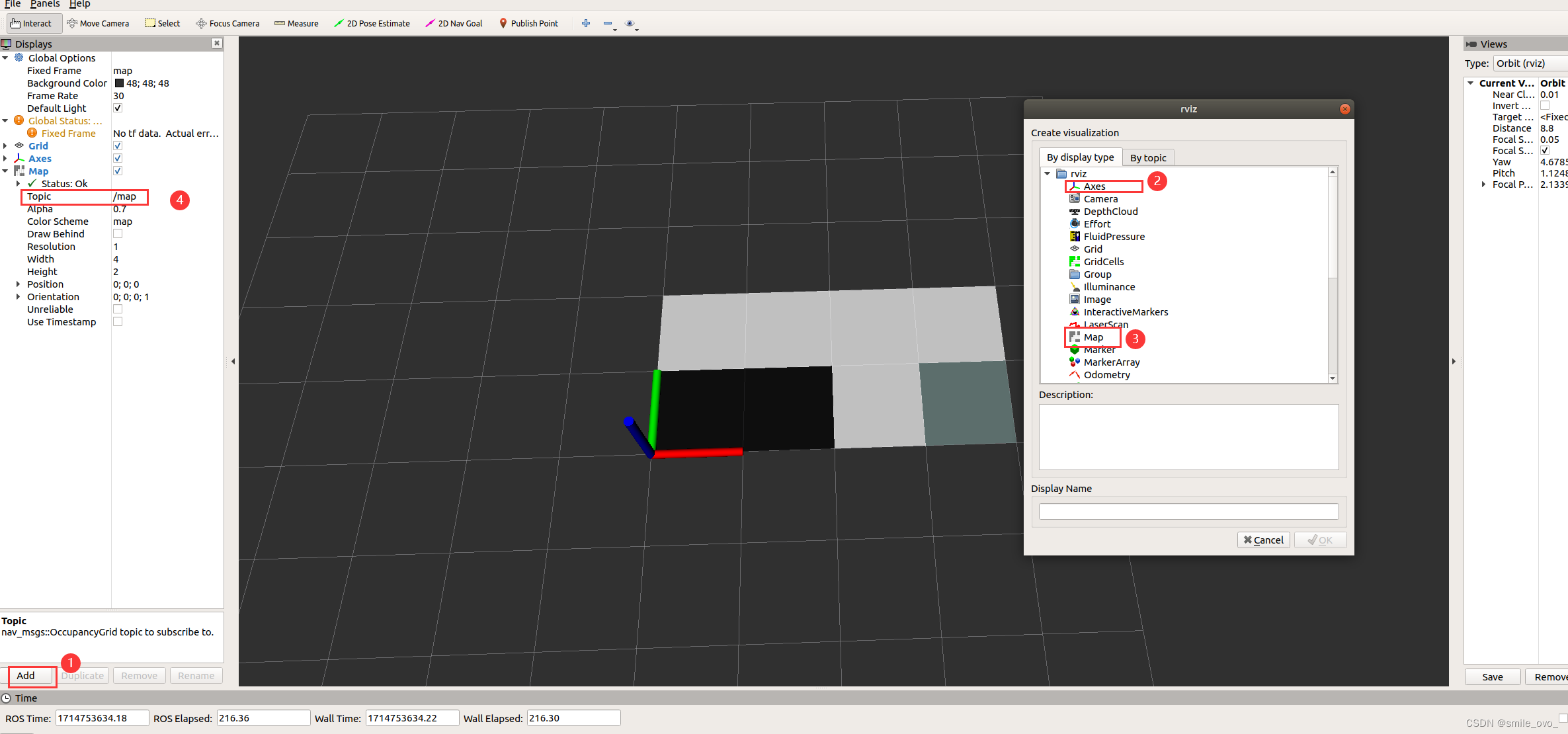
ROS2 Tutorial: Creating map in RViz
GitHub - GyroPalm/ROS-SLAM-Map-Editor: A web-based map editor for quick ...
ROS navigation tutorial ros — The MORSE Simulator Documentation
What determines the initial orientation of the map frame? · Issue #1170 ...
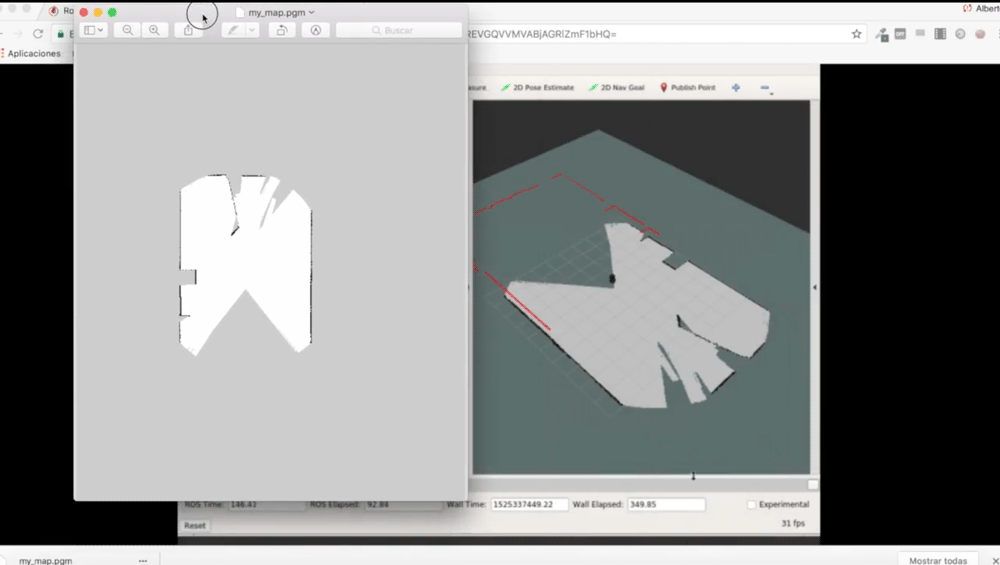
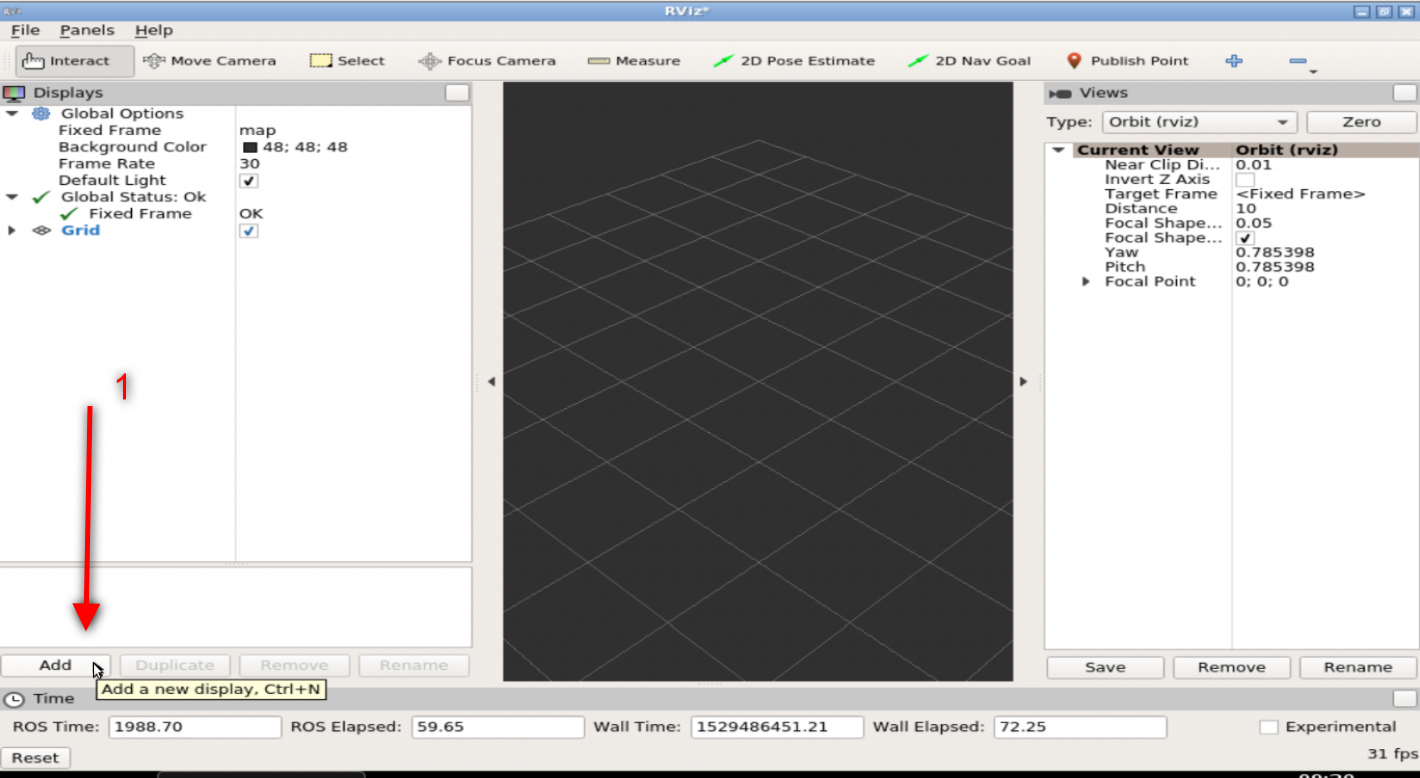
[ROS Q&A] 136 - How to edit a map generated with gmapping - The Construct
Running ROS 2 on a UBR-1 for autonomous navigation
What Is A Ros Plugin at Brittany Wertz blog
Figure 7 from Human-Robot Interaction Using ROS Framework for Indoor ...
PPT - ROS - Lesson 4 PowerPoint Presentation, free download - ID:2204824
Setting Up the ROS Navigation Stack for a Simulated Robot
Robots/ARI/Tutorials/Navigation/Mapping - ROS Wiki
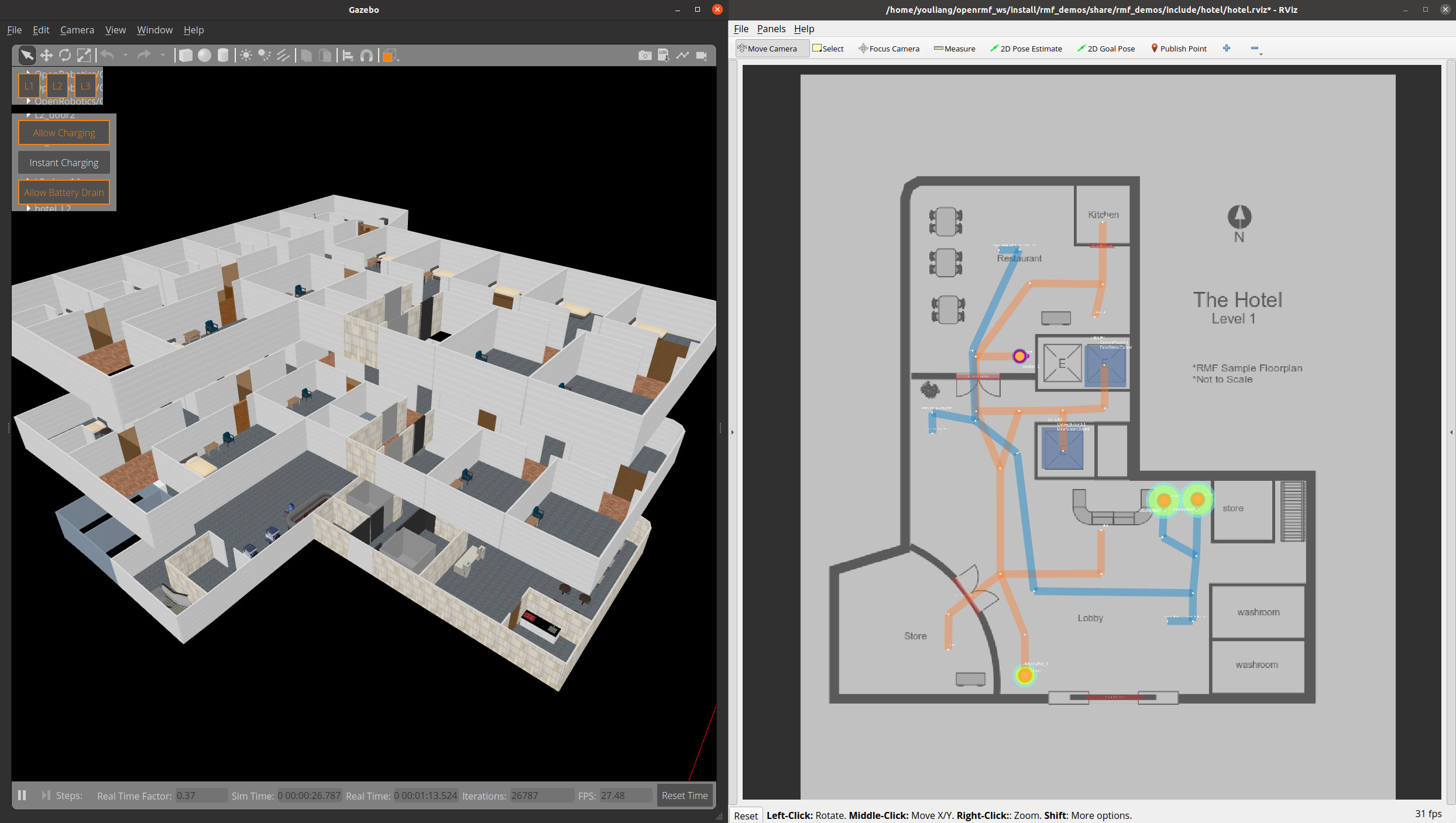
[ROS2 Q&A] How to create map for Robot Fleet Management Open-RMF
rtabmap_ros/TutorialsOldInterface/StereoOutdoorMapping - ROS Wiki
[ROS Courses] Learn RTAB-MAP in ROS | Robot Ignite Academy
Nav2 - ROS 2 Navigation Stack — ros-docs documentation
ROS world, robot, sensor simulation, mapping, localization | Work-is ...
A revised ROS mapping scheme | Download Scientific Diagram
Navigation and SLAM Using the ROS 2 Navigation Stack
ROS高效编程报错(chapter6)之tf error: canTransform: target_frame map does not ...
[ROS tutorial] RTAB-Map in ROS 101 - YouTube
ROS2 Nav2 - Generate a Map with slam_toolbox - The Robotics Back-End
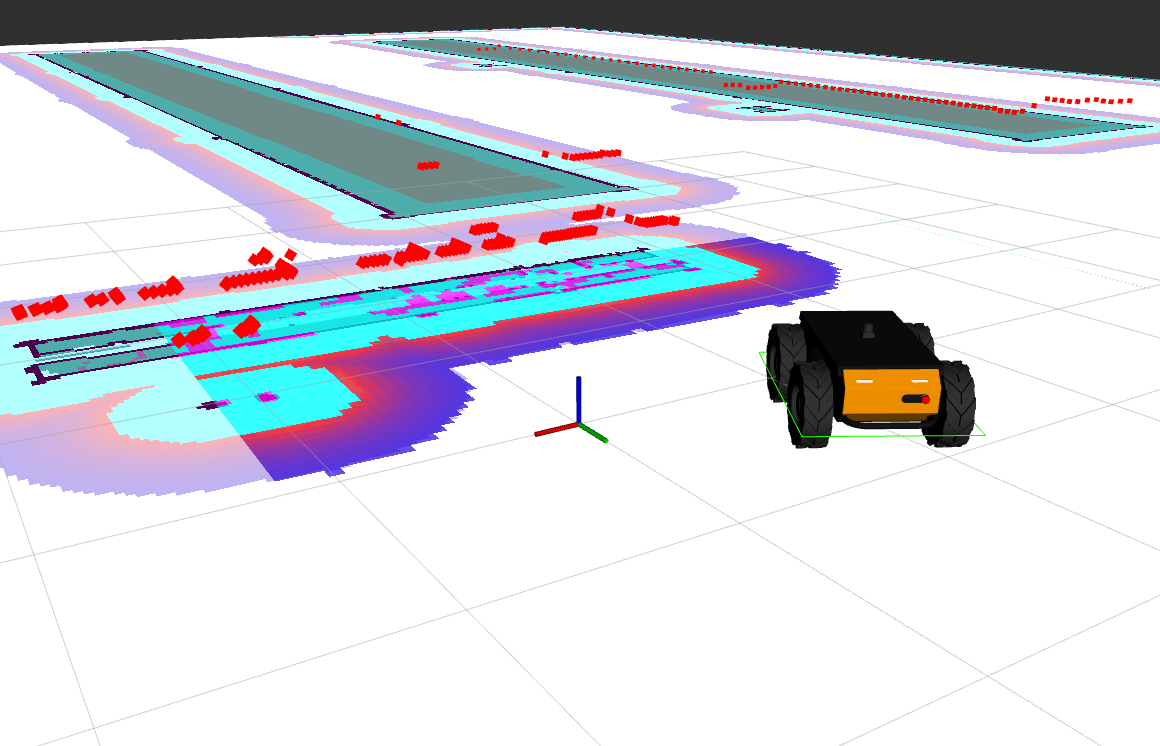
ROS Navigation — Isaac Sim Documentation
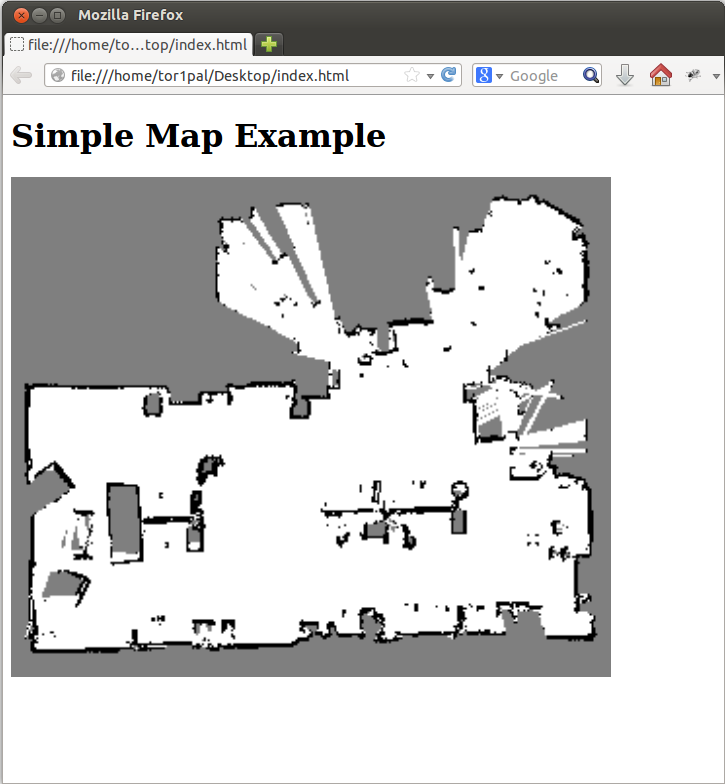
ros2djs/Tutorials/VisualizingAMap - ROS Wiki
Build High Performance Robotic Applications with NVIDIA Isaac ROS ...
ROS Concepts and Design Patterns - Programming Multiple Robots with ROS 2
gmapping, map_frame, odom_frame (ROS - rviz - Lidar) : r/MobileRobots
ROS学习笔记之——robot_localization包_robot localization github ros2 galactic ...
isaac_ros_occupancy_grid_localizer — isaac_ros_docs documentation
ROS之Map的建立发布_rospgm地图发布节点-CSDN博客
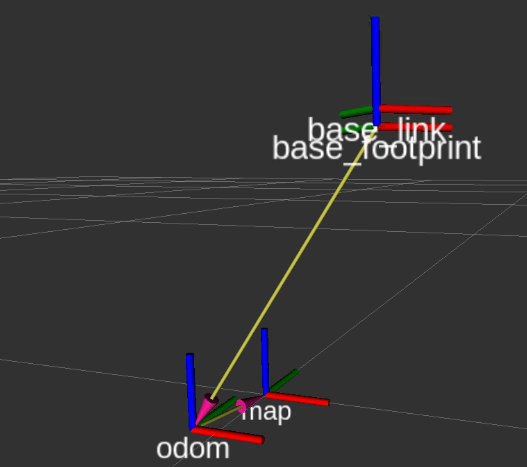
ROS中odom、map坐标系的理解-CSDN博客
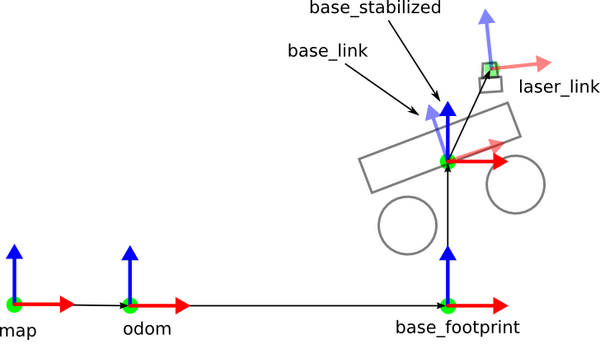
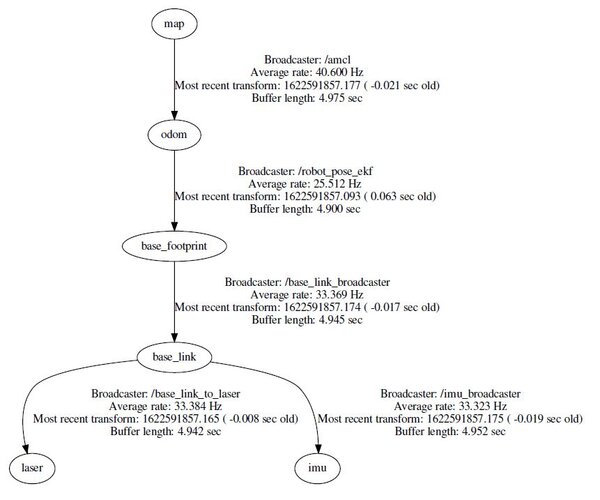
Coordinate Frames and Transforms for ROS-based Mobile Robots
ROS入门教程-理论与实践(7.2.2 导航实现02_地图服务) - 知乎
ROS坐标系常用坐标及其变换详细梳理-CSDN博客
ros基础必看之各个frame的理解_ros frame-CSDN博客
rtabmap_ros-CSDN博客
ros中tf的关系总结,cartographer中odom的笔记整理_cartographer tf-CSDN博客
ros_map_tool/ros_map_tool.html at main · twilgrove/ros_map_tool · GitHub
Mapping and Localization in ROS2 · Robot & Chisel
ROS: Simultaneous Mapping and Localization with RTABmap - DEV Community
ROS学习(11)使用ROS创建地图_ros建图_敲代码的雪糕的博客-CSDN博客
GitHub - baiyeweiguang/icp_localization_ros2: ROS2 version of icp ...
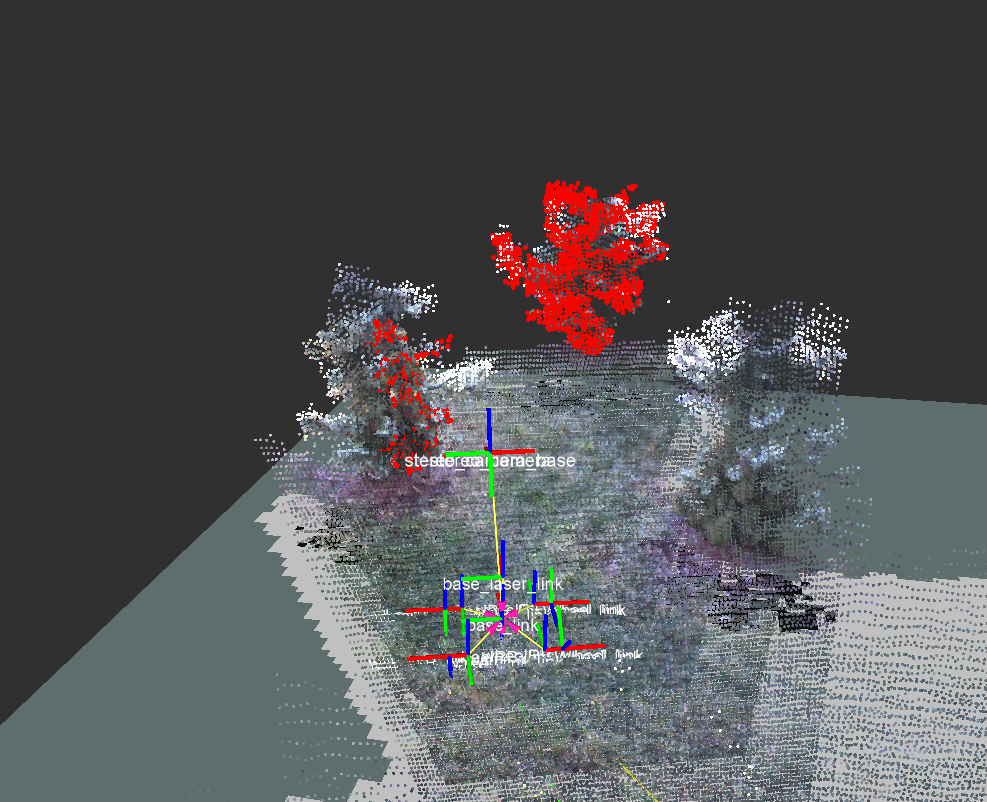
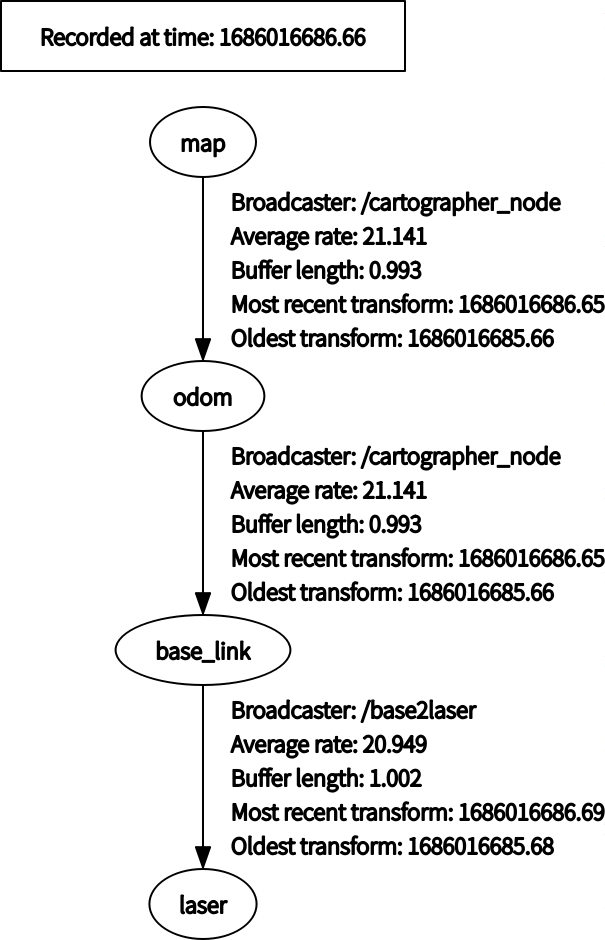
I need to know the detail of the frames of the Cartographer. Please ...
ROS:解读ROS的navigation Stack_ros navigation stack-CSDN博客
使用cartographer_ros发布的地图直接用于导航实现动态地图路线规划_ros 使用cartg-CSDN博客
ROS中map、odom、base_link等坐标系关系的理解 - 程序员大本营
ros的navigation之———gmapping应用详解(in ros)-CSDN博客
ros中的EVO、APE测评——SLAM精度测评(二)_evo slam对比 汉字-CSDN博客
ros2中rviz无地图显示frame[map]does not exist | 鱼香ROS